

About the Execution of LTSMin+red for RobotManipulation-PT-10000
| Execution Summary | |||||
| Max Memory Used (MB) |
Time wait (ms) | CPU Usage (ms) | I/O Wait (ms) | Computed Result | Execution Status |
| 571.796 | 56814.00 | 112034.00 | 241.60 | TFFFTTTTTTFFFFTF | normal |
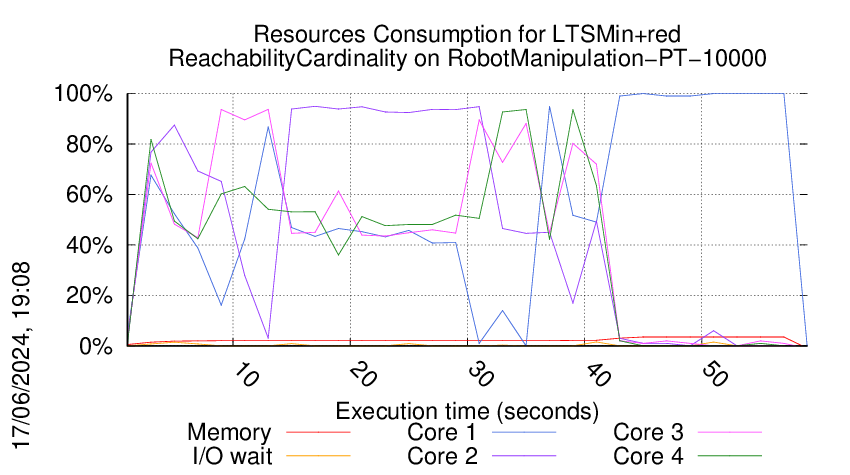
Execution Chart
We display below the execution chart for this examination (boot time has been removed).
Trace from the execution
Formatting '/data/fkordon/mcc2024-input.r524-tall-171679079900254.qcow2', fmt=qcow2 size=4294967296 backing_file=/data/fkordon/mcc2024-input.qcow2 backing_fmt=qcow2 cluster_size=65536 lazy_refcounts=off refcount_bits=16
Waiting for the VM to be ready (probing ssh)
................................................................................................................................................................................................................................................................................................................................................................................................................
=====================================================================
Generated by BenchKit 2-5568
Executing tool ltsminxred
Input is RobotManipulation-PT-10000, examination is ReachabilityCardinality
Time confinement is 3600 seconds
Memory confinement is 16384 MBytes
Number of cores is 4
Run identifier is r524-tall-171679079900254
=====================================================================
--------------------
preparation of the directory to be used:
/home/mcc/execution
total 512K
-rw-r--r-- 1 mcc users 8.8K May 14 13:22 CTLCardinality.txt
-rw-r--r-- 1 mcc users 87K May 14 13:22 CTLCardinality.xml
-rw-r--r-- 1 mcc users 6.6K May 14 13:22 CTLFireability.txt
-rw-r--r-- 1 mcc users 58K May 14 13:22 CTLFireability.xml
-rw-r--r-- 1 mcc users 4.2K May 18 16:43 GenericPropertiesDefinition.xml
-rw-r--r-- 1 mcc users 6.6K May 18 16:43 GenericPropertiesVerdict.xml
-rw-r--r-- 1 mcc users 3.7K Apr 23 07:49 LTLCardinality.txt
-rw-r--r-- 1 mcc users 23K Apr 23 07:49 LTLCardinality.xml
-rw-r--r-- 1 mcc users 2.3K May 19 07:29 LTLFireability.txt
-rw-r--r-- 1 mcc users 17K May 19 18:58 LTLFireability.xml
-rw-r--r-- 1 mcc users 14K Apr 11 18:31 ReachabilityCardinality.txt
-rw-r--r-- 1 mcc users 134K Apr 11 18:31 ReachabilityCardinality.xml
-rw-r--r-- 1 mcc users 11K Apr 11 18:30 ReachabilityFireability.txt
-rw-r--r-- 1 mcc users 84K Apr 11 18:30 ReachabilityFireability.xml
-rw-r--r-- 1 mcc users 1.8K Apr 23 07:49 UpperBounds.txt
-rw-r--r-- 1 mcc users 3.8K Apr 23 07:49 UpperBounds.xml
-rw-r--r-- 1 mcc users 6 May 18 16:43 equiv_col
-rw-r--r-- 1 mcc users 6 May 18 16:43 instance
-rw-r--r-- 1 mcc users 6 May 18 16:43 iscolored
-rw-r--r-- 1 mcc users 6.3K May 18 16:43 model.pnml
--------------------
content from stdout:
=== Data for post analysis generated by BenchKit (invocation template)
The expected result is a vector of booleans
BOOL_VECTOR
here is the order used to build the result vector(from text file)
FORMULA_NAME RobotManipulation-PT-10000-ReachabilityCardinality-2024-00
FORMULA_NAME RobotManipulation-PT-10000-ReachabilityCardinality-2024-01
FORMULA_NAME RobotManipulation-PT-10000-ReachabilityCardinality-2024-02
FORMULA_NAME RobotManipulation-PT-10000-ReachabilityCardinality-2024-03
FORMULA_NAME RobotManipulation-PT-10000-ReachabilityCardinality-2024-04
FORMULA_NAME RobotManipulation-PT-10000-ReachabilityCardinality-2024-05
FORMULA_NAME RobotManipulation-PT-10000-ReachabilityCardinality-2024-06
FORMULA_NAME RobotManipulation-PT-10000-ReachabilityCardinality-2024-07
FORMULA_NAME RobotManipulation-PT-10000-ReachabilityCardinality-2024-08
FORMULA_NAME RobotManipulation-PT-10000-ReachabilityCardinality-2024-09
FORMULA_NAME RobotManipulation-PT-10000-ReachabilityCardinality-2024-10
FORMULA_NAME RobotManipulation-PT-10000-ReachabilityCardinality-2024-11
FORMULA_NAME RobotManipulation-PT-10000-ReachabilityCardinality-2024-12
FORMULA_NAME RobotManipulation-PT-10000-ReachabilityCardinality-2024-13
FORMULA_NAME RobotManipulation-PT-10000-ReachabilityCardinality-2024-14
FORMULA_NAME RobotManipulation-PT-10000-ReachabilityCardinality-2024-15
=== Now, execution of the tool begins
BK_START 1717221673180
Invoking MCC driver with
BK_TOOL=ltsminxred
BK_EXAMINATION=ReachabilityCardinality
BK_BIN_PATH=/home/mcc/BenchKit/bin/
BK_TIME_CONFINEMENT=3600
BK_INPUT=RobotManipulation-PT-10000
BK_MEMORY_CONFINEMENT=16384
Applying reductions before tool ltsmin
Invoking reducer
Running Version 202405141337
[2024-06-01 06:01:14] [INFO ] Running its-tools with arguments : [-pnfolder, /home/mcc/execution, -examination, ReachabilityCardinality, -timeout, 360, -rebuildPNML]
[2024-06-01 06:01:14] [INFO ] Parsing pnml file : /home/mcc/execution/model.pnml
[2024-06-01 06:01:14] [INFO ] Load time of PNML (sax parser for PT used): 28 ms
[2024-06-01 06:01:14] [INFO ] Transformed 15 places.
[2024-06-01 06:01:14] [INFO ] Transformed 11 transitions.
[2024-06-01 06:01:14] [INFO ] Parsed PT model containing 15 places and 11 transitions and 34 arcs in 142 ms.
Parsed 16 properties from file /home/mcc/execution/ReachabilityCardinality.xml in 25 ms.
Working with output stream class java.io.PrintStream
FORMULA RobotManipulation-PT-10000-ReachabilityCardinality-2024-03 FALSE TECHNIQUES TOPOLOGICAL INITIAL_STATE
RANDOM walk for 80009 steps (0 resets) in 148 ms. (536 steps per ms) remains 15/15 properties
BEST_FIRST walk for 4004 steps (8 resets) in 274 ms. (14 steps per ms) remains 15/15 properties
BEST_FIRST walk for 4004 steps (8 resets) in 78 ms. (50 steps per ms) remains 15/15 properties
BEST_FIRST walk for 4004 steps (8 resets) in 118 ms. (33 steps per ms) remains 15/15 properties
BEST_FIRST walk for 4003 steps (8 resets) in 122 ms. (32 steps per ms) remains 15/15 properties
BEST_FIRST walk for 4004 steps (8 resets) in 51 ms. (77 steps per ms) remains 15/15 properties
BEST_FIRST walk for 4004 steps (8 resets) in 137 ms. (29 steps per ms) remains 15/15 properties
BEST_FIRST walk for 4004 steps (8 resets) in 61 ms. (64 steps per ms) remains 15/15 properties
BEST_FIRST walk for 4003 steps (8 resets) in 59 ms. (66 steps per ms) remains 15/15 properties
BEST_FIRST walk for 4003 steps (8 resets) in 72 ms. (54 steps per ms) remains 15/15 properties
BEST_FIRST walk for 4004 steps (8 resets) in 82 ms. (48 steps per ms) remains 15/15 properties
BEST_FIRST walk for 4002 steps (8 resets) in 35 ms. (111 steps per ms) remains 15/15 properties
BEST_FIRST walk for 4004 steps (8 resets) in 50 ms. (78 steps per ms) remains 15/15 properties
BEST_FIRST walk for 4004 steps (8 resets) in 92 ms. (43 steps per ms) remains 15/15 properties
BEST_FIRST walk for 4004 steps (8 resets) in 65 ms. (60 steps per ms) remains 15/15 properties
BEST_FIRST walk for 4003 steps (8 resets) in 34 ms. (114 steps per ms) remains 15/15 properties
Interrupted probabilistic random walk after 193400 steps, run timeout after 3001 ms. (steps per millisecond=64 ) properties seen :3 out of 15
Probabilistic random walk after 193400 steps, saw 136718 distinct states, run finished after 3014 ms. (steps per millisecond=64 ) properties seen :3
FORMULA RobotManipulation-PT-10000-ReachabilityCardinality-2024-15 FALSE TECHNIQUES TOPOLOGICAL PROBABILISTIC_WALK
FORMULA RobotManipulation-PT-10000-ReachabilityCardinality-2024-13 FALSE TECHNIQUES TOPOLOGICAL PROBABILISTIC_WALK
FORMULA RobotManipulation-PT-10000-ReachabilityCardinality-2024-02 FALSE TECHNIQUES TOPOLOGICAL PROBABILISTIC_WALK
// Phase 1: matrix 11 rows 15 cols
[2024-06-01 06:01:18] [INFO ] Computed 6 invariants in 9 ms
Problem RobotManipulation-PT-10000-ReachabilityCardinality-2024-11 is UNSAT
FORMULA RobotManipulation-PT-10000-ReachabilityCardinality-2024-11 FALSE TECHNIQUES SMT_REFINEMENT
All remaining problems are real, not stopping.
At refinement iteration 0 (INCLUDED_ONLY) 0/15 variables, 3/3 constraints. Problems are: Problem set: 1 solved, 11 unsolved
Problem RobotManipulation-PT-10000-ReachabilityCardinality-2024-05 is UNSAT
FORMULA RobotManipulation-PT-10000-ReachabilityCardinality-2024-05 TRUE TECHNIQUES SMT_REFINEMENT
At refinement iteration 1 (INCLUDED_ONLY) 0/15 variables, 3/6 constraints. Problems are: Problem set: 2 solved, 10 unsolved
At refinement iteration 2 (INCLUDED_ONLY) 0/15 variables, 0/6 constraints. Problems are: Problem set: 2 solved, 10 unsolved
At refinement iteration 3 (OVERLAPS) 11/26 variables, 15/21 constraints. Problems are: Problem set: 2 solved, 10 unsolved
At refinement iteration 4 (INCLUDED_ONLY) 0/26 variables, 0/21 constraints. Problems are: Problem set: 2 solved, 10 unsolved
At refinement iteration 5 (OVERLAPS) 0/26 variables, 0/21 constraints. Problems are: Problem set: 2 solved, 10 unsolved
No progress, stopping.
After SMT solving in domain Real declared 26/26 variables, and 21 constraints, problems are : Problem set: 2 solved, 10 unsolved in 422 ms.
Refiners :[Positive P Invariants (semi-flows): 3/3 constraints, Generalized P Invariants (flows): 3/3 constraints, State Equation: 15/15 constraints, PredecessorRefiner: 12/12 constraints, Known Traps: 0/0 constraints]
Escalating to Integer solving :Problem set: 2 solved, 10 unsolved
At refinement iteration 0 (INCLUDED_ONLY) 0/15 variables, 3/3 constraints. Problems are: Problem set: 2 solved, 10 unsolved
At refinement iteration 1 (INCLUDED_ONLY) 0/15 variables, 3/6 constraints. Problems are: Problem set: 2 solved, 10 unsolved
At refinement iteration 2 (INCLUDED_ONLY) 0/15 variables, 0/6 constraints. Problems are: Problem set: 2 solved, 10 unsolved
At refinement iteration 3 (OVERLAPS) 11/26 variables, 15/21 constraints. Problems are: Problem set: 2 solved, 10 unsolved
At refinement iteration 4 (INCLUDED_ONLY) 0/26 variables, 10/31 constraints. Problems are: Problem set: 2 solved, 10 unsolved
At refinement iteration 5 (INCLUDED_ONLY) 0/26 variables, 0/31 constraints. Problems are: Problem set: 2 solved, 10 unsolved
At refinement iteration 6 (OVERLAPS) 0/26 variables, 0/31 constraints. Problems are: Problem set: 2 solved, 10 unsolved
No progress, stopping.
After SMT solving in domain Int declared 26/26 variables, and 31 constraints, problems are : Problem set: 2 solved, 10 unsolved in 391 ms.
Refiners :[Positive P Invariants (semi-flows): 3/3 constraints, Generalized P Invariants (flows): 3/3 constraints, State Equation: 15/15 constraints, PredecessorRefiner: 10/12 constraints, Known Traps: 0/0 constraints]
After SMT, in 896ms problems are : Problem set: 2 solved, 10 unsolved
FORMULA RobotManipulation-PT-10000-ReachabilityCardinality-2024-09 TRUE TECHNIQUES PARIKH_WALK
FORMULA RobotManipulation-PT-10000-ReachabilityCardinality-2024-08 TRUE TECHNIQUES PARIKH_WALK
FORMULA RobotManipulation-PT-10000-ReachabilityCardinality-2024-07 TRUE TECHNIQUES PARIKH_WALK
FORMULA RobotManipulation-PT-10000-ReachabilityCardinality-2024-04 TRUE TECHNIQUES PARIKH_WALK
FORMULA RobotManipulation-PT-10000-ReachabilityCardinality-2024-01 FALSE TECHNIQUES PARIKH_WALK
FORMULA RobotManipulation-PT-10000-ReachabilityCardinality-2024-00 TRUE TECHNIQUES PARIKH_WALK
Parikh walk visited 6 properties in 30004 ms.
Support contains 15 out of 15 places. Attempting structural reductions.
Starting structural reductions in REACHABILITY mode, iteration 0 : 15/15 places, 11/11 transitions.
Applied a total of 0 rules in 8 ms. Remains 15 /15 variables (removed 0) and now considering 11/11 (removed 0) transitions.
Finished structural reductions in REACHABILITY mode , in 1 iterations and 19 ms. Remains : 15/15 places, 11/11 transitions.
RANDOM walk for 80008 steps (0 resets) in 205 ms. (388 steps per ms) remains 4/4 properties
BEST_FIRST walk for 40004 steps (8 resets) in 127 ms. (312 steps per ms) remains 4/4 properties
BEST_FIRST walk for 40004 steps (8 resets) in 490 ms. (81 steps per ms) remains 4/4 properties
BEST_FIRST walk for 40004 steps (8 resets) in 117 ms. (339 steps per ms) remains 4/4 properties
BEST_FIRST walk for 40004 steps (8 resets) in 150 ms. (264 steps per ms) remains 4/4 properties
Interrupted probabilistic random walk after 473329 steps, run timeout after 3001 ms. (steps per millisecond=157 ) properties seen :1 out of 4
Probabilistic random walk after 473329 steps, saw 276683 distinct states, run finished after 3004 ms. (steps per millisecond=157 ) properties seen :1
FORMULA RobotManipulation-PT-10000-ReachabilityCardinality-2024-06 TRUE TECHNIQUES TOPOLOGICAL PROBABILISTIC_WALK
[2024-06-01 06:01:52] [INFO ] Invariant cache hit.
All remaining problems are real, not stopping.
At refinement iteration 0 (INCLUDED_ONLY) 0/15 variables, 3/3 constraints. Problems are: Problem set: 0 solved, 3 unsolved
At refinement iteration 1 (INCLUDED_ONLY) 0/15 variables, 3/6 constraints. Problems are: Problem set: 0 solved, 3 unsolved
At refinement iteration 2 (INCLUDED_ONLY) 0/15 variables, 0/6 constraints. Problems are: Problem set: 0 solved, 3 unsolved
At refinement iteration 3 (OVERLAPS) 11/26 variables, 15/21 constraints. Problems are: Problem set: 0 solved, 3 unsolved
At refinement iteration 4 (INCLUDED_ONLY) 0/26 variables, 0/21 constraints. Problems are: Problem set: 0 solved, 3 unsolved
At refinement iteration 5 (OVERLAPS) 0/26 variables, 0/21 constraints. Problems are: Problem set: 0 solved, 3 unsolved
No progress, stopping.
After SMT solving in domain Real declared 26/26 variables, and 21 constraints, problems are : Problem set: 0 solved, 3 unsolved in 85 ms.
Refiners :[Positive P Invariants (semi-flows): 3/3 constraints, Generalized P Invariants (flows): 3/3 constraints, State Equation: 15/15 constraints, PredecessorRefiner: 3/3 constraints, Known Traps: 0/0 constraints]
Escalating to Integer solving :Problem set: 0 solved, 3 unsolved
At refinement iteration 0 (INCLUDED_ONLY) 0/15 variables, 3/3 constraints. Problems are: Problem set: 0 solved, 3 unsolved
At refinement iteration 1 (INCLUDED_ONLY) 0/15 variables, 3/6 constraints. Problems are: Problem set: 0 solved, 3 unsolved
At refinement iteration 2 (INCLUDED_ONLY) 0/15 variables, 0/6 constraints. Problems are: Problem set: 0 solved, 3 unsolved
At refinement iteration 3 (OVERLAPS) 11/26 variables, 15/21 constraints. Problems are: Problem set: 0 solved, 3 unsolved
At refinement iteration 4 (INCLUDED_ONLY) 0/26 variables, 3/24 constraints. Problems are: Problem set: 0 solved, 3 unsolved
At refinement iteration 5 (INCLUDED_ONLY) 0/26 variables, 0/24 constraints. Problems are: Problem set: 0 solved, 3 unsolved
At refinement iteration 6 (OVERLAPS) 0/26 variables, 0/24 constraints. Problems are: Problem set: 0 solved, 3 unsolved
No progress, stopping.
After SMT solving in domain Int declared 26/26 variables, and 24 constraints, problems are : Problem set: 0 solved, 3 unsolved in 131 ms.
Refiners :[Positive P Invariants (semi-flows): 3/3 constraints, Generalized P Invariants (flows): 3/3 constraints, State Equation: 15/15 constraints, PredecessorRefiner: 3/3 constraints, Known Traps: 0/0 constraints]
After SMT, in 237ms problems are : Problem set: 0 solved, 3 unsolved
FORMULA RobotManipulation-PT-10000-ReachabilityCardinality-2024-12 FALSE TECHNIQUES PARIKH_WALK
FORMULA RobotManipulation-PT-10000-ReachabilityCardinality-2024-10 FALSE TECHNIQUES PARIKH_WALK
Finished Parikh walk after 113360 steps, including 0 resets, run visited all 1 properties in 115 ms. (steps per millisecond=985 )
FORMULA RobotManipulation-PT-10000-ReachabilityCardinality-2024-14 TRUE TECHNIQUES PARIKH_WALK
Parikh walk visited 3 properties in 17165 ms.
All properties solved without resorting to model-checking.
Total runtime 55585 ms.
ITS solved all properties within timeout
BK_STOP 1717221729994
--------------------
content from stderr:
+ ulimit -s 65536
+ [[ -z '' ]]
+ export LTSMIN_MEM_SIZE=8589934592
+ LTSMIN_MEM_SIZE=8589934592
+ export PYTHONPATH=/home/mcc/BenchKit/itstools/pylibs
+ PYTHONPATH=/home/mcc/BenchKit/itstools/pylibs
+ export LD_LIBRARY_PATH=/home/mcc/BenchKit/itstools/pylibs:
+ LD_LIBRARY_PATH=/home/mcc/BenchKit/itstools/pylibs:
++ sed s/.jar//
++ perl -pe 's/.*\.//g'
++ ls /home/mcc/BenchKit/bin//../reducer/bin//../../itstools//itstools/plugins/fr.lip6.move.gal.application.pnmcc_1.0.0.202405141337.jar
+ VERSION=202405141337
+ echo 'Running Version 202405141337'
+ /home/mcc/BenchKit/bin//../reducer/bin//../../itstools//itstools/its-tools -pnfolder /home/mcc/execution -examination ReachabilityCardinality -timeout 360 -rebuildPNML
Sequence of Actions to be Executed by the VM
This is useful if one wants to reexecute the tool in the VM from the submitted image disk.
set -x
# this is for BenchKit: configuration of major elements for the test
export BK_INPUT="RobotManipulation-PT-10000"
export BK_EXAMINATION="ReachabilityCardinality"
export BK_TOOL="ltsminxred"
export BK_RESULT_DIR="/tmp/BK_RESULTS/OUTPUTS"
export BK_TIME_CONFINEMENT="3600"
export BK_MEMORY_CONFINEMENT="16384"
export BK_BIN_PATH="/home/mcc/BenchKit/bin/"
# this is specific to your benchmark or test
export BIN_DIR="$HOME/BenchKit/bin"
# remove the execution directoty if it exists (to avoid increse of .vmdk images)
if [ -d execution ] ; then
rm -rf execution
fi
# this is for BenchKit: explicit launching of the test
echo "====================================================================="
echo " Generated by BenchKit 2-5568"
echo " Executing tool ltsminxred"
echo " Input is RobotManipulation-PT-10000, examination is ReachabilityCardinality"
echo " Time confinement is $BK_TIME_CONFINEMENT seconds"
echo " Memory confinement is 16384 MBytes"
echo " Number of cores is 4"
echo " Run identifier is r524-tall-171679079900254"
echo "====================================================================="
echo
echo "--------------------"
echo "preparation of the directory to be used:"
tar xzf /home/mcc/BenchKit/INPUTS/RobotManipulation-PT-10000.tgz
mv RobotManipulation-PT-10000 execution
cd execution
if [ "ReachabilityCardinality" = "ReachabilityDeadlock" ] || [ "ReachabilityCardinality" = "UpperBounds" ] || [ "ReachabilityCardinality" = "QuasiLiveness" ] || [ "ReachabilityCardinality" = "StableMarking" ] || [ "ReachabilityCardinality" = "Liveness" ] || [ "ReachabilityCardinality" = "OneSafe" ] || [ "ReachabilityCardinality" = "StateSpace" ]; then
rm -f GenericPropertiesVerdict.xml
fi
pwd
ls -lh
echo
echo "--------------------"
echo "content from stdout:"
echo
echo "=== Data for post analysis generated by BenchKit (invocation template)"
echo
if [ "ReachabilityCardinality" = "UpperBounds" ] ; then
echo "The expected result is a vector of positive values"
echo NUM_VECTOR
elif [ "ReachabilityCardinality" != "StateSpace" ] ; then
echo "The expected result is a vector of booleans"
echo BOOL_VECTOR
else
echo "no data necessary for post analysis"
fi
echo
if [ -f "ReachabilityCardinality.txt" ] ; then
echo "here is the order used to build the result vector(from text file)"
for x in $(grep Property ReachabilityCardinality.txt | cut -d ' ' -f 2 | sort -u) ; do
echo "FORMULA_NAME $x"
done
elif [ -f "ReachabilityCardinality.xml" ] ; then # for cunf (txt files deleted;-)
echo echo "here is the order used to build the result vector(from xml file)"
for x in $(grep '
echo "FORMULA_NAME $x"
done
elif [ "ReachabilityCardinality" = "ReachabilityDeadlock" ] || [ "ReachabilityCardinality" = "QuasiLiveness" ] || [ "ReachabilityCardinality" = "StableMarking" ] || [ "ReachabilityCardinality" = "Liveness" ] || [ "ReachabilityCardinality" = "OneSafe" ] ; then
echo "FORMULA_NAME ReachabilityCardinality"
fi
echo
echo "=== Now, execution of the tool begins"
echo
echo -n "BK_START "
date -u +%s%3N
echo
timeout -s 9 $BK_TIME_CONFINEMENT bash -c "/home/mcc/BenchKit/BenchKit_head.sh 2> STDERR ; echo ; echo -n \"BK_STOP \" ; date -u +%s%3N"
if [ $? -eq 137 ] ; then
echo
echo "BK_TIME_CONFINEMENT_REACHED"
fi
echo
echo "--------------------"
echo "content from stderr:"
echo
cat STDERR ;