

About the Execution of Marcie for ParamProductionCell-PT-5
| Execution Summary | |||||
| Max Memory Used (MB) |
Time wait (ms) | CPU Usage (ms) | I/O Wait (ms) | Computed Result | Execution Status |
| 5667.163 | 14072.00 | 13980.00 | 110.00 | TFFFFFTFFTTFTTFF | normal |
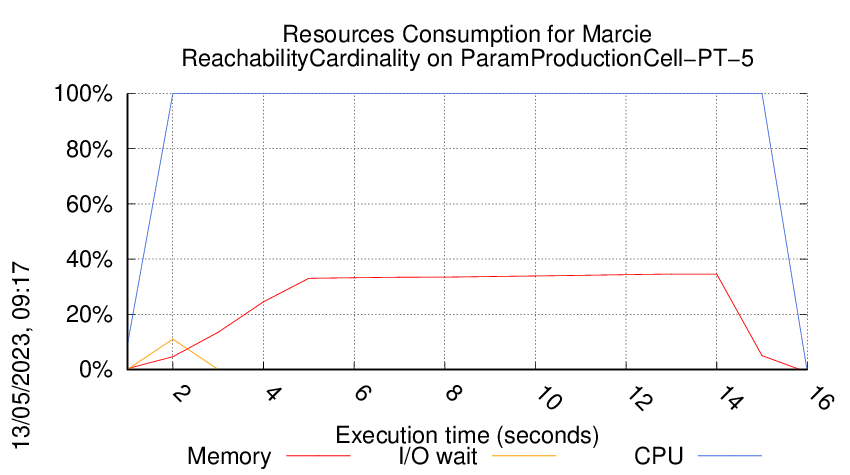
Execution Chart
We display below the execution chart for this examination (boot time has been removed).
Trace from the execution
Formatting '/data/fkordon/mcc2023-input.r257-smll-167863532700406.qcow2', fmt=qcow2 size=4294967296 backing_file=/data/fkordon/mcc2023-input.qcow2 cluster_size=65536 lazy_refcounts=off refcount_bits=16
Waiting for the VM to be ready (probing ssh)
.......................................
=====================================================================
Generated by BenchKit 2-5348
Executing tool marcie
Input is ParamProductionCell-PT-5, examination is ReachabilityCardinality
Time confinement is 3600 seconds
Memory confinement is 16384 MBytes
Number of cores is 1
Run identifier is r257-smll-167863532700406
=====================================================================
--------------------
preparation of the directory to be used:
/home/mcc/execution
total 656K
-rw-r--r-- 1 mcc users 7.2K Feb 26 17:17 CTLCardinality.txt
-rw-r--r-- 1 mcc users 62K Feb 26 17:17 CTLCardinality.xml
-rw-r--r-- 1 mcc users 5.4K Feb 26 17:16 CTLFireability.txt
-rw-r--r-- 1 mcc users 38K Feb 26 17:16 CTLFireability.xml
-rw-r--r-- 1 mcc users 4.2K Jan 29 11:40 GenericPropertiesDefinition.xml
-rw-r--r-- 1 mcc users 6.2K Jan 29 11:40 GenericPropertiesVerdict.xml
-rw-r--r-- 1 mcc users 4.2K Feb 25 16:30 LTLCardinality.txt
-rw-r--r-- 1 mcc users 25K Feb 25 16:30 LTLCardinality.xml
-rw-r--r-- 1 mcc users 2.7K Feb 25 16:30 LTLFireability.txt
-rw-r--r-- 1 mcc users 16K Feb 25 16:30 LTLFireability.xml
-rw-r--r-- 1 mcc users 19K Feb 26 17:19 ReachabilityCardinality.txt
-rw-r--r-- 1 mcc users 166K Feb 26 17:19 ReachabilityCardinality.xml
-rw-r--r-- 1 mcc users 11K Feb 26 17:18 ReachabilityFireability.txt
-rw-r--r-- 1 mcc users 66K Feb 26 17:18 ReachabilityFireability.xml
-rw-r--r-- 1 mcc users 1.9K Feb 25 16:30 UpperBounds.txt
-rw-r--r-- 1 mcc users 3.9K Feb 25 16:30 UpperBounds.xml
-rw-r--r-- 1 mcc users 6 Mar 5 18:23 equiv_col
-rw-r--r-- 1 mcc users 2 Mar 5 18:23 instance
-rw-r--r-- 1 mcc users 6 Mar 5 18:23 iscolored
-rw-r--r-- 1 mcc users 174K Mar 5 18:23 model.pnml
--------------------
content from stdout:
=== Data for post analysis generated by BenchKit (invocation template)
The expected result is a vector of booleans
BOOL_VECTOR
here is the order used to build the result vector(from text file)
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityCardinality-00
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityCardinality-01
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityCardinality-02
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityCardinality-03
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityCardinality-04
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityCardinality-05
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityCardinality-06
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityCardinality-07
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityCardinality-08
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityCardinality-09
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityCardinality-10
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityCardinality-11
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityCardinality-12
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityCardinality-13
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityCardinality-14
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityCardinality-15
=== Now, execution of the tool begins
BK_START 1678841908491
bash -c /home/mcc/BenchKit/BenchKit_head.sh 2> STDERR ; echo ; echo -n "BK_STOP " ; date -u +%s%3N
Invoking MCC driver with
BK_TOOL=marcie
BK_EXAMINATION=ReachabilityCardinality
BK_BIN_PATH=/home/mcc/BenchKit/bin/
BK_TIME_CONFINEMENT=3600
BK_INPUT=ParamProductionCell-PT-5
Not applying reductions.
Model is PT
ReachabilityCardinality PT
timeout --kill-after=10s --signal=SIGINT 1m for testing only
Marcie built on Linux at 2019-11-18.
A model checker for Generalized Stochastic Petri nets
authors: Alex Tovchigrechko (IDD package and CTL model checking)
Martin Schwarick (Symbolic numerical analysis and CSL model checking)
Christian Rohr (Simulative and approximative numerical model checking)
marcie@informatik.tu-cottbus.de
called as: /home/mcc/BenchKit/bin//../marcie/bin/marcie --net-file=model.pnml --mcc-file=ReachabilityCardinality.xml --memory=6 --mcc-mode
parse successfull
net created successfully
Net: ParamProductionCell_PT_5
(NrP: 231 NrTr: 202 NrArc: 846)
parse formulas
formulas created successfully
place and transition orderings generation:0m 0.012sec
net check time: 0m 0.000sec
init dd package: 0m 3.980sec
RS generation: 0m 0.680sec
-> reachability set: #nodes 12832 (1.3e+04) #states 1,657,242 (6)
starting MCC model checker
--------------------------
checking: EF [~ [A1L_ext_rs<=1]]
normalized: E [true U ~ [A1L_ext_rs<=1]]
abstracting: (A1L_ext_rs<=1)
states: 1,657,242 (6)
-> the formula is FALSE
FORMULA ParamProductionCell-PT-5-ReachabilityCardinality-04 FALSE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.002sec
checking: AG [A1L_in<=1]
normalized: ~ [E [true U ~ [A1L_in<=1]]]
abstracting: (A1L_in<=1)
states: 1,657,242 (6)
-> the formula is TRUE
FORMULA ParamProductionCell-PT-5-ReachabilityCardinality-06 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.000sec
checking: EF [1<=A2L_ret_run]
normalized: E [true U 1<=A2L_ret_run]
abstracting: (1<=A2L_ret_run)
states: 14,114 (4)
-> the formula is TRUE
FORMULA ParamProductionCell-PT-5-ReachabilityCardinality-09 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.601sec
checking: EF [~ [deposit_belt_empty<=0]]
normalized: E [true U ~ [deposit_belt_empty<=0]]
abstracting: (deposit_belt_empty<=0)
states: 1,540,402 (6)
-> the formula is TRUE
FORMULA ParamProductionCell-PT-5-ReachabilityCardinality-10 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 1.901sec
checking: AG [ch_PA2_free<=blank_forged]
normalized: ~ [E [true U ~ [ch_PA2_free<=blank_forged]]]
abstracting: (ch_PA2_free<=blank_forged)
states: 1,611,333 (6)
-> the formula is FALSE
FORMULA ParamProductionCell-PT-5-ReachabilityCardinality-03 FALSE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.074sec
checking: AG [[[~ [[[[~ [[belt1_start<=1 | CU_lift_rs<=A1U_in]] & [~ [crane_release_height<=1] | [1<=A2U_out & 1<=FB_deliver_run]]] | ~ [arm1_magnet_off<=A2L_rot2_run]] & ~ [belt1_stop<=1]]] | 1<=ch_PA2_full] | 1<=CU_unloaded]]
normalized: ~ [E [true U ~ [[1<=CU_unloaded | [1<=ch_PA2_full | ~ [[~ [belt1_stop<=1] & [~ [arm1_magnet_off<=A2L_rot2_run] | [[[1<=A2U_out & 1<=FB_deliver_run] | ~ [crane_release_height<=1]] & ~ [[belt1_start<=1 | CU_lift_rs<=A1U_in]]]]]]]]]]]
abstracting: (CU_lift_rs<=A1U_in)
states: 1,616,143 (6)
abstracting: (belt1_start<=1)
states: 1,657,242 (6)
abstracting: (crane_release_height<=1)
states: 1,657,242 (6)
abstracting: (1<=FB_deliver_run)
states: 21,224 (4)
abstracting: (1<=A2U_out)
states: 24,517 (4)
abstracting: (arm1_magnet_off<=A2L_rot2_run)
states: 1,187,293 (6)
abstracting: (belt1_stop<=1)
states: 1,657,242 (6)
abstracting: (1<=ch_PA2_full)
states: 89,841 (4)
abstracting: (1<=CU_unloaded)
states: 41,495 (4)
-> the formula is TRUE
FORMULA ParamProductionCell-PT-5-ReachabilityCardinality-00 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.059sec
checking: AG [[FB_trans_run<=1 | [[1<=press_at_upper_pos | ~ [[1<=FB_trans_run & ~ [[[[crane_mag_off<=0 & crane_stop_v<=table_bottom_pos] & ~ [1<=A2U_rot3_rs]] | [[1<=A2L_rotated & 1<=blank_forged] & belt2_start<=CU_in]]]]]] | ~ [A1L_rot3_in<=0]]]]
normalized: ~ [E [true U ~ [[FB_trans_run<=1 | [~ [A1L_rot3_in<=0] | [1<=press_at_upper_pos | ~ [[1<=FB_trans_run & ~ [[[belt2_start<=CU_in & [1<=A2L_rotated & 1<=blank_forged]] | [~ [1<=A2U_rot3_rs] & [crane_mag_off<=0 & crane_stop_v<=table_bottom_pos]]]]]]]]]]]]
abstracting: (crane_stop_v<=table_bottom_pos)
states: 1,159,576 (6)
abstracting: (crane_mag_off<=0)
states: 914,057 (5)
abstracting: (1<=A2U_rot3_rs)
states: 4,640 (3)
abstracting: (1<=blank_forged)
states: 89,841 (4)
abstracting: (1<=A2L_rotated)
states: 7,057 (3)
abstracting: (belt2_start<=CU_in)
states: 1,405,002 (6)
abstracting: (1<=FB_trans_run)
states: 21,224 (4)
abstracting: (1<=press_at_upper_pos)
states: 359,364 (5)
abstracting: (A1L_rot3_in<=0)
states: 1,655,798 (6)
abstracting: (FB_trans_run<=1)
states: 1,657,242 (6)
-> the formula is TRUE
FORMULA ParamProductionCell-PT-5-ReachabilityCardinality-13 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.065sec
checking: EF [~ [[[[[~ [[arm2_waiting_for_swivel_2<=0 | crane_above_feed_belt<=0]] & 1<=A1U_rot2_rs] | A1U_ret_run<=1] | 1<=PL_lower_rs] & [[[~ [[1<=PU_in & CU_lift_run<=0]] | crane_lift<=1] | ~ [CL_in<=0]] | [[[[TL_out<=ch_CF_full | CL_lift_rs<=A2U_rot3_run] & crane_release_height<=0] | [[table_unload_angle<=0 & A2U_rot3_run<=arm2_pick_up_angle] | ~ [arm2_store_free<=FB_trans_run]]] | [TU_in<=A2U_unloaded | A2L_ret_run<=0]]]]]]
normalized: E [true U ~ [[[[[TU_in<=A2U_unloaded | A2L_ret_run<=0] | [[~ [arm2_store_free<=FB_trans_run] | [table_unload_angle<=0 & A2U_rot3_run<=arm2_pick_up_angle]] | [crane_release_height<=0 & [TL_out<=ch_CF_full | CL_lift_rs<=A2U_rot3_run]]]] | [~ [CL_in<=0] | [crane_lift<=1 | ~ [[1<=PU_in & CU_lift_run<=0]]]]] & [1<=PL_lower_rs | [A1U_ret_run<=1 | [1<=A1U_rot2_rs & ~ [[arm2_waiting_for_swivel_2<=0 | crane_above_feed_belt<=0]]]]]]]]
abstracting: (crane_above_feed_belt<=0)
states: 808,285 (5)
abstracting: (arm2_waiting_for_swivel_2<=0)
states: 1,585,681 (6)
abstracting: (1<=A1U_rot2_rs)
states: 6,138 (3)
abstracting: (A1U_ret_run<=1)
states: 1,657,242 (6)
abstracting: (1<=PL_lower_rs)
states: 45,909 (4)
abstracting: (CU_lift_run<=0)
states: 1,574,252 (6)
abstracting: (1<=PU_in)
states: 89,841 (4)
abstracting: (crane_lift<=1)
states: 1,657,242 (6)
abstracting: (CL_in<=0)
states: 1,604,897 (6)
abstracting: (CL_lift_rs<=A2U_rot3_run)
states: 1,605,249 (6)
abstracting: (TL_out<=ch_CF_full)
states: 1,633,262 (6)
abstracting: (crane_release_height<=0)
states: 1,449,767 (6)
abstracting: (A2U_rot3_run<=arm2_pick_up_angle)
states: 1,652,602 (6)
abstracting: (table_unload_angle<=0)
states: 659,368 (5)
abstracting: (arm2_store_free<=FB_trans_run)
states: 1,343,605 (6)
abstracting: (A2L_ret_run<=0)
states: 1,643,128 (6)
abstracting: (TU_in<=A2U_unloaded)
states: 1,562,988 (6)
-> the formula is FALSE
FORMULA ParamProductionCell-PT-5-ReachabilityCardinality-02 FALSE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.136sec
checking: AG [~ [[[[[1<=arm1_pick_up_angle & PU_lower_run<=1] & ~ [[arm1_backward<=0 & ~ [[A2U_rot3_run<=ch_PA2_free & ~ [A2L_loaded<=0]]]]]] & [[[[1<=arm1_backward & ~ [[belt1_light_barrier_true<=crane_stop_h | A1U_rot3_in<=PL_in]]] & arm2_forward<=0] | A2L_rot3_in<=TU_out] & ~ [[~ [[[crane_mag_off<=A2U_unloaded | ch_CF_free<=TU_lift_run] & feed_belt_idle<=belt1_light_barrier_false]] & [~ [[ch_A2D_free<=1 | 1<=press_at_middle_pos]] | 1<=press_at_middle_pos]]]]] | 1<=A2L_rotated]]]
normalized: ~ [E [true U [1<=A2L_rotated | [[~ [[[1<=press_at_middle_pos | ~ [[ch_A2D_free<=1 | 1<=press_at_middle_pos]]] & ~ [[feed_belt_idle<=belt1_light_barrier_false & [crane_mag_off<=A2U_unloaded | ch_CF_free<=TU_lift_run]]]]] & [A2L_rot3_in<=TU_out | [arm2_forward<=0 & [1<=arm1_backward & ~ [[belt1_light_barrier_true<=crane_stop_h | A1U_rot3_in<=PL_in]]]]]] & [~ [[arm1_backward<=0 & ~ [[A2U_rot3_run<=ch_PA2_free & ~ [A2L_loaded<=0]]]]] & [1<=arm1_pick_up_angle & PU_lower_run<=1]]]]]]
abstracting: (PU_lower_run<=1)
states: 1,657,242 (6)
abstracting: (1<=arm1_pick_up_angle)
states: 571,055 (5)
abstracting: (A2L_loaded<=0)
states: 1,650,185 (6)
abstracting: (A2U_rot3_run<=ch_PA2_free)
states: 1,649,128 (6)
abstracting: (arm1_backward<=0)
states: 1,614,630 (6)
abstracting: (A1U_rot3_in<=PL_in)
states: 1,655,882 (6)
abstracting: (belt1_light_barrier_true<=crane_stop_h)
states: 1,651,110 (6)
abstracting: (1<=arm1_backward)
states: 42,612 (4)
abstracting: (arm2_forward<=0)
states: 1,562,520 (6)
abstracting: (A2L_rot3_in<=TU_out)
states: 1,650,657 (6)
abstracting: (ch_CF_free<=TU_lift_run)
states: 1,537,454 (6)
abstracting: (crane_mag_off<=A2U_unloaded)
states: 924,595 (5)
abstracting: (feed_belt_idle<=belt1_light_barrier_false)
states: 1,657,242 (6)
abstracting: (1<=press_at_middle_pos)
states: 636,234 (5)
abstracting: (ch_A2D_free<=1)
states: 1,657,242 (6)
abstracting: (1<=press_at_middle_pos)
states: 636,234 (5)
abstracting: (1<=A2L_rotated)
states: 7,057 (3)
-> the formula is FALSE
FORMULA ParamProductionCell-PT-5-ReachabilityCardinality-15 FALSE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.482sec
checking: AG [[~ [1<=A1U_rot3_rs] | [~ [1<=A1U_rot3_in] & [[[[[1<=CL_lower_run & ~ [[1<=CL_out | 1<=CU_trans_rs]]] | [1<=arm1_release_angle & A2U_out<=0]] | ~ [[[[arm2_storing<=arm2_release_ext & 1<=arm1_release_ext] | ~ [A1L_rotated<=A2U_ext_rs]] | [~ [1<=FB_trans_rs] & [A1L_loaded<=0 | belt1_start<=deposit_belt_occupied]]]]] & [1<=ch_A2D_free & [DB_deliver_rs<=1 | [1<=A1U_in | [[arm2_forward<=0 & table_right<=0] | [table_unload_angle<=ch_CF_full & TL_out<=CU_unloaded]]]]]] | 1<=A1L_rot1_run]]]]
normalized: ~ [E [true U ~ [[[[1<=A1L_rot1_run | [[1<=ch_A2D_free & [DB_deliver_rs<=1 | [1<=A1U_in | [[arm2_forward<=0 & table_right<=0] | [table_unload_angle<=ch_CF_full & TL_out<=CU_unloaded]]]]] & [[[1<=CL_lower_run & ~ [[1<=CL_out | 1<=CU_trans_rs]]] | [1<=arm1_release_angle & A2U_out<=0]] | ~ [[[~ [1<=FB_trans_rs] & [A1L_loaded<=0 | belt1_start<=deposit_belt_occupied]] | [~ [A1L_rotated<=A2U_ext_rs] | [arm2_storing<=arm2_release_ext & 1<=arm1_release_ext]]]]]]] & ~ [1<=A1U_rot3_in]] | ~ [1<=A1U_rot3_rs]]]]]
abstracting: (1<=A1U_rot3_rs)
states: 1,360 (3)
abstracting: (1<=A1U_rot3_in)
states: 1,360 (3)
abstracting: (1<=arm1_release_ext)
states: 37,490 (4)
abstracting: (arm2_storing<=arm2_release_ext)
states: 1,086,829 (6)
abstracting: (A1L_rotated<=A2U_ext_rs)
states: 1,650,536 (6)
abstracting: (belt1_start<=deposit_belt_occupied)
states: 1,607,934 (6)
abstracting: (A1L_loaded<=0)
states: 1,650,536 (6)
abstracting: (1<=FB_trans_rs)
states: 10,612 (4)
abstracting: (A2U_out<=0)
states: 1,632,725 (6)
abstracting: (1<=arm1_release_angle)
states: 320,465 (5)
abstracting: (1<=CU_trans_rs)
states: 41,495 (4)
abstracting: (1<=CL_out)
states: 52,345 (4)
abstracting: (1<=CL_lower_run)
states: 104,690 (5)
abstracting: (TL_out<=CU_unloaded)
states: 1,623,403 (6)
abstracting: (table_unload_angle<=ch_CF_full)
states: 868,941 (5)
abstracting: (table_right<=0)
states: 1,266,342 (6)
abstracting: (arm2_forward<=0)
states: 1,562,520 (6)
abstracting: (1<=A1U_in)
states: 14,996 (4)
abstracting: (DB_deliver_rs<=1)
states: 1,657,242 (6)
abstracting: (1<=ch_A2D_free)
states: 116,840 (5)
abstracting: (1<=A1L_rot1_run)
states: 11,676 (4)
-> the formula is FALSE
FORMULA ParamProductionCell-PT-5-ReachabilityCardinality-08 FALSE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.374sec
checking: AG [[[~ [[[[[~ [arm1_backward<=0] | blank_forged<=ch_A1P_full] | A2L_ext_run<=arm2_storing] | [crane_pick_up_height<=A2L_ret_run & 1<=crane_lift]] & [~ [A2U_rot3_rs<=0] & [~ [1<=crane_mag_on] & [1<=A2U_ext_rs | deposit_belt_empty<=A1L_rot2_in]]]]] | ~ [[A2L_loaded<=1 & [[1<=A1U_ret_run | 1<=arm1_magnet_on] | [[arm2_waiting_for_swivel_2<=0 | arm2_forward<=A1L_in] & [PU_out<=1 & feed_belt_occupied<=table_ready_for_unloading]]]]]] & [~ [ch_FT_full<=1] | [[[~ [[~ [1<=PL_in] & [1<=A2L_rot2_rs & arm2_retract_ext<=A1U_ret_rs]]] | blank_forged<=PU_in] | table_stop_v<=0] | 1<=press_upward]]]]
normalized: ~ [E [true U ~ [[[[1<=press_upward | [table_stop_v<=0 | [blank_forged<=PU_in | ~ [[[1<=A2L_rot2_rs & arm2_retract_ext<=A1U_ret_rs] & ~ [1<=PL_in]]]]]] | ~ [ch_FT_full<=1]] & [~ [[A2L_loaded<=1 & [[[PU_out<=1 & feed_belt_occupied<=table_ready_for_unloading] & [arm2_waiting_for_swivel_2<=0 | arm2_forward<=A1L_in]] | [1<=A1U_ret_run | 1<=arm1_magnet_on]]]] | ~ [[[[[1<=A2U_ext_rs | deposit_belt_empty<=A1L_rot2_in] & ~ [1<=crane_mag_on]] & ~ [A2U_rot3_rs<=0]] & [[crane_pick_up_height<=A2L_ret_run & 1<=crane_lift] | [A2L_ext_run<=arm2_storing | [blank_forged<=ch_A1P_full | ~ [arm1_backward<=0]]]]]]]]]]]
abstracting: (arm1_backward<=0)
states: 1,614,630 (6)
abstracting: (blank_forged<=ch_A1P_full)
states: 1,567,401 (6)
abstracting: (A2L_ext_run<=arm2_storing)
states: 1,643,128 (6)
abstracting: (1<=crane_lift)
states: 281,520 (5)
abstracting: (crane_pick_up_height<=A2L_ret_run)
states: 1,397,497 (6)
abstracting: (A2U_rot3_rs<=0)
states: 1,652,602 (6)
abstracting: (1<=crane_mag_on)
states: 914,057 (5)
abstracting: (deposit_belt_empty<=A1L_rot2_in)
states: 1,540,416 (6)
abstracting: (1<=A2U_ext_rs)
states: 24,517 (4)
abstracting: (1<=arm1_magnet_on)
states: 1,184,337 (6)
abstracting: (1<=A1U_ret_run)
states: 14,996 (4)
abstracting: (arm2_forward<=A1L_in)
states: 1,562,520 (6)
abstracting: (arm2_waiting_for_swivel_2<=0)
states: 1,585,681 (6)
abstracting: (feed_belt_occupied<=table_ready_for_unloading)
states: 1,368,052 (6)
abstracting: (PU_out<=1)
states: 1,657,242 (6)
abstracting: (A2L_loaded<=1)
states: 1,657,242 (6)
abstracting: (ch_FT_full<=1)
states: 1,657,242 (6)
abstracting: (1<=PL_in)
states: 45,909 (4)
abstracting: (arm2_retract_ext<=A1U_ret_rs)
states: 165,368 (5)
abstracting: (1<=A2L_rot2_rs)
states: 1,478 (3)
abstracting: (blank_forged<=PU_in)
states: 1,567,401 (6)
abstracting: (table_stop_v<=0)
states: 390,900 (5)
abstracting: (1<=press_upward)
states: 269,523 (5)
-> the formula is FALSE
FORMULA ParamProductionCell-PT-5-ReachabilityCardinality-07 FALSE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.538sec
checking: AG [[PU_in<=1 | [[~ [[~ [FB_in<=CU_ready_to_ungrasp] | ~ [[[A1U_rot3_rs<=1 | 1<=crane_mag_off] | [DB_trans_rs<=1 | arm1_waiting_for_swivel_2<=ch_DC_free]]]]] & [[~ [[[1<=FB_trans_run & A2L_rotated<=0] | ~ [arm1_retract_ext<=1]]] | [[~ [1<=crane_store_free] | crane_lower<=A1L_rot3_in] | 1<=A2L_rot1_run]] & [[CU_ready_to_ungrasp<=A2U_ret_rs & [[[1<=A2L_rot3_run & 1<=arm2_release_angle] & [ch_TA1_full<=1 | 1<=ch_A2D_full]] & [~ [arm1_retract_ext<=0] & [table_load_angle<=CU_in & CL_trans_rs<=1]]]] & [[[~ [A1L_out<=0] | [1<=arm1_magnet_on & TU_lift_run<=1]] | ~ [1<=crane_mag_off]] | crane_storing<=1]]]] | [[1<=ch_PA2_full | [[table_right<=robot_left | ~ [[ch_CF_free<=CL_lift_rs | 1<=CU_trans_run]]] & table_ready_for_loading<=A2U_unloaded]] | arm1_forward<=1]]]]
normalized: ~ [E [true U ~ [[PU_in<=1 | [[arm1_forward<=1 | [1<=ch_PA2_full | [table_ready_for_loading<=A2U_unloaded & [table_right<=robot_left | ~ [[ch_CF_free<=CL_lift_rs | 1<=CU_trans_run]]]]]] | [~ [[~ [[[DB_trans_rs<=1 | arm1_waiting_for_swivel_2<=ch_DC_free] | [A1U_rot3_rs<=1 | 1<=crane_mag_off]]] | ~ [FB_in<=CU_ready_to_ungrasp]]] & [[[crane_storing<=1 | [~ [1<=crane_mag_off] | [[1<=arm1_magnet_on & TU_lift_run<=1] | ~ [A1L_out<=0]]]] & [CU_ready_to_ungrasp<=A2U_ret_rs & [[[table_load_angle<=CU_in & CL_trans_rs<=1] & ~ [arm1_retract_ext<=0]] & [[ch_TA1_full<=1 | 1<=ch_A2D_full] & [1<=A2L_rot3_run & 1<=arm2_release_angle]]]]] & [[1<=A2L_rot1_run | [crane_lower<=A1L_rot3_in | ~ [1<=crane_store_free]]] | ~ [[~ [arm1_retract_ext<=1] | [1<=FB_trans_run & A2L_rotated<=0]]]]]]]]]]]
abstracting: (A2L_rotated<=0)
states: 1,650,185 (6)
abstracting: (1<=FB_trans_run)
states: 21,224 (4)
abstracting: (arm1_retract_ext<=1)
states: 1,657,242 (6)
abstracting: (1<=crane_store_free)
states: 108,005 (5)
abstracting: (crane_lower<=A1L_rot3_in)
states: 1,375,938 (6)
abstracting: (1<=A2L_rot1_run)
states: 11,158 (4)
abstracting: (1<=arm2_release_angle)
states: 517,474 (5)
abstracting: (1<=A2L_rot3_run)
states: 14,114 (4)
abstracting: (1<=ch_A2D_full)
states: 282,952 (5)
abstracting: (ch_TA1_full<=1)
states: 1,657,242 (6)
abstracting: (arm1_retract_ext<=0)
states: 71,020 (4)
abstracting: (CL_trans_rs<=1)
states: 1,657,242 (6)
abstracting: (table_load_angle<=CU_in)
states: 1,012,013 (6)
abstracting: (CU_ready_to_ungrasp<=A2U_ret_rs)
states: 1,616,209 (6)
abstracting: (A1L_out<=0)
states: 1,650,536 (6)
abstracting: (TU_lift_run<=1)
states: 1,657,242 (6)
abstracting: (1<=arm1_magnet_on)
states: 1,184,337 (6)
abstracting: (1<=crane_mag_off)
states: 743,185 (5)
abstracting: (crane_storing<=1)
states: 1,657,242 (6)
abstracting: (FB_in<=CU_ready_to_ungrasp)
states: 1,646,630 (6)
abstracting: (1<=crane_mag_off)
states: 743,185 (5)
abstracting: (A1U_rot3_rs<=1)
states: 1,657,242 (6)
abstracting: (arm1_waiting_for_swivel_2<=ch_DC_free)
states: 1,626,249 (6)
abstracting: (DB_trans_rs<=1)
states: 1,657,242 (6)
abstracting: (1<=CU_trans_run)
states: 82,990 (4)
abstracting: (ch_CF_free<=CL_lift_rs)
states: 1,522,687 (6)
abstracting: (table_right<=robot_left)
states: 1,283,082 (6)
abstracting: (table_ready_for_loading<=A2U_unloaded)
states: 1,435,209 (6)
abstracting: (1<=ch_PA2_full)
states: 89,841 (4)
abstracting: (arm1_forward<=1)
states: 1,657,242 (6)
abstracting: (PU_in<=1)
states: 1,657,242 (6)
-> the formula is TRUE
FORMULA ParamProductionCell-PT-5-ReachabilityCardinality-12 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.203sec
checking: EF [[[[~ [[~ [1<=PL_lower_rs] | 1<=press_ready_for_unloading]] & ~ [deposit_belt_empty<=1]] & [~ [[[[~ [[1<=arm2_having_swivel_2 | CL_ready_to_transport<=0]] & arm2_pick_up_angle<=belt1_light_barrier_true] | ~ [[~ [1<=feed_belt_idle] | ~ [A1U_out<=1]]]] | ~ [arm1_pick_up_ext<=PL_lower_rs]]] | ~ [[~ [1<=TL_out] | TL_lower_rs<=1]]]] | [~ [[~ [[DB_trans_run<=0 | arm2_having_swivel_1<=belt2_light_barrier_true]] | [A1L_rot2_rs<=0 | ~ [[[ch_FT_full<=deposit_belt_idle | 1<=A1L_rot2_rs] | ~ [belt1_stop<=1]]]]]] & [~ [1<=FB_out] & [[1<=table_stop_h & [[~ [A1L_rotated<=ch_PA2_full] | ~ [arm2_pick_up_ext<=CU_lift_rs]] | [[swivel<=arm1_retract_ext & [1<=press_at_middle_pos | 1<=arm2_retract_ext]] | ~ [[arm2_store_free<=1 | A1U_in<=table_top_pos]]]]] & [[[[[1<=press_at_middle_pos | A1L_rot1_in<=A2U_rot3_run] & [table_upward<=0 & A2L_ext_rs<=belt2_light_barrier_false]] | [~ [1<=DB_deliver_run] & [arm1_release_angle<=press_ready_for_loading & table_ready_for_unloading<=PL_in]]] & [1<=arm2_release_ext & [1<=table_unload_angle & arm1_waiting_for_swivel_2<=1]]] & ~ [[A2L_extended<=1 | A2L_ret_run<=A1U_rot1_in]]]]]]]]
normalized: E [true U [[[~ [[~ [arm1_pick_up_ext<=PL_lower_rs] | [~ [[~ [A1U_out<=1] | ~ [1<=feed_belt_idle]]] | [arm2_pick_up_angle<=belt1_light_barrier_true & ~ [[1<=arm2_having_swivel_2 | CL_ready_to_transport<=0]]]]]] | ~ [[TL_lower_rs<=1 | ~ [1<=TL_out]]]] & [~ [deposit_belt_empty<=1] & ~ [[1<=press_ready_for_unloading | ~ [1<=PL_lower_rs]]]]] | [[[[1<=table_stop_h & [[~ [[arm2_store_free<=1 | A1U_in<=table_top_pos]] | [swivel<=arm1_retract_ext & [1<=press_at_middle_pos | 1<=arm2_retract_ext]]] | [~ [arm2_pick_up_ext<=CU_lift_rs] | ~ [A1L_rotated<=ch_PA2_full]]]] & [~ [[A2L_extended<=1 | A2L_ret_run<=A1U_rot1_in]] & [[1<=arm2_release_ext & [1<=table_unload_angle & arm1_waiting_for_swivel_2<=1]] & [[[arm1_release_angle<=press_ready_for_loading & table_ready_for_unloading<=PL_in] & ~ [1<=DB_deliver_run]] | [[table_upward<=0 & A2L_ext_rs<=belt2_light_barrier_false] & [1<=press_at_middle_pos | A1L_rot1_in<=A2U_rot3_run]]]]]] & ~ [1<=FB_out]] & ~ [[[A1L_rot2_rs<=0 | ~ [[~ [belt1_stop<=1] | [ch_FT_full<=deposit_belt_idle | 1<=A1L_rot2_rs]]]] | ~ [[DB_trans_run<=0 | arm2_having_swivel_1<=belt2_light_barrier_true]]]]]]]
abstracting: (arm2_having_swivel_1<=belt2_light_barrier_true)
states: 1,610,264 (6)
abstracting: (DB_trans_run<=0)
states: 1,569,246 (6)
abstracting: (1<=A1L_rot2_rs)
states: 840
abstracting: (ch_FT_full<=deposit_belt_idle)
states: 1,610,622 (6)
abstracting: (belt1_stop<=1)
states: 1,657,242 (6)
abstracting: (A1L_rot2_rs<=0)
states: 1,656,402 (6)
abstracting: (1<=FB_out)
states: 10,612 (4)
abstracting: (A1L_rot1_in<=A2U_rot3_run)
states: 1,651,404 (6)
abstracting: (1<=press_at_middle_pos)
states: 636,234 (5)
abstracting: (A2L_ext_rs<=belt2_light_barrier_false)
states: 1,656,230 (6)
abstracting: (table_upward<=0)
states: 1,266,342 (6)
abstracting: (1<=DB_deliver_run)
states: 87,996 (4)
abstracting: (table_ready_for_unloading<=PL_in)
states: 1,404,454 (6)
abstracting: (arm1_release_angle<=press_ready_for_loading)
states: 1,460,646 (6)
abstracting: (arm1_waiting_for_swivel_2<=1)
states: 1,657,242 (6)
abstracting: (1<=table_unload_angle)
states: 997,874 (5)
abstracting: (1<=arm2_release_ext)
states: 122,585 (5)
abstracting: (A2L_ret_run<=A1U_rot1_in)
states: 1,643,128 (6)
abstracting: (A2L_extended<=1)
states: 1,657,242 (6)
abstracting: (A1L_rotated<=ch_PA2_full)
states: 1,651,056 (6)
abstracting: (arm2_pick_up_ext<=CU_lift_rs)
states: 1,622,902 (6)
abstracting: (1<=arm2_retract_ext)
states: 1,499,372 (6)
abstracting: (1<=press_at_middle_pos)
states: 636,234 (5)
abstracting: (swivel<=arm1_retract_ext)
states: 1,657,242 (6)
abstracting: (A1U_in<=table_top_pos)
states: 1,648,142 (6)
abstracting: (arm2_store_free<=1)
states: 1,657,242 (6)
abstracting: (1<=table_stop_h)
states: 1,266,342 (6)
abstracting: (1<=PL_lower_rs)
states: 45,909 (4)
abstracting: (1<=press_ready_for_unloading)
states: 300,303 (5)
abstracting: (deposit_belt_empty<=1)
states: 1,657,242 (6)
abstracting: (1<=TL_out)
states: 34,592 (4)
abstracting: (TL_lower_rs<=1)
states: 1,657,242 (6)
abstracting: (CL_ready_to_transport<=0)
states: 1,604,897 (6)
abstracting: (1<=arm2_having_swivel_2)
states: 88,843 (4)
abstracting: (arm2_pick_up_angle<=belt1_light_barrier_true)
states: 1,415,034 (6)
abstracting: (1<=feed_belt_idle)
states: 1,071,332 (6)
abstracting: (A1U_out<=1)
states: 1,657,242 (6)
abstracting: (arm1_pick_up_ext<=PL_lower_rs)
states: 1,624,332 (6)
-> the formula is FALSE
FORMULA ParamProductionCell-PT-5-ReachabilityCardinality-11 FALSE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.221sec
checking: AG [[[table_unload_angle<=1 & [1<=A1L_rot2_run | [[[A2U_out<=1 | ~ [[~ [arm2_magnet_on<=1] & robot_right<=crane_transport_height]]] | [[[[A1U_in<=TL_lower_run & TU_lift_rs<=A2L_ext_rs] | [ch_PA2_free<=0 & CL_lower_run<=A2L_rotated]] | ~ [[1<=ch_A2D_free | 1<=CU_lift_rs]]] | [~ [crane_to_belt1<=ch_A2D_full] | [[1<=arm2_pick_up_ext | 1<=A2U_rot2_in] & ~ [ch_TA1_full<=A2U_rot1_rs]]]]] & ~ [[1<=A2L_ret_run & arm2_waiting_for_swivel_2<=arm1_pick_up_ext]]]]] | [~ [[[~ [[1<=crane_storing | 1<=FB_in]] & [~ [1<=deposit_belt_empty] & feed_belt_occupied<=1]] & press_at_upper_pos<=A2U_unloaded]] | [~ [[[[[1<=ch_DC_full | A1U_rot1_rs<=crane_to_belt1] & [arm1_release_ext<=crane_above_feed_belt & deposit_belt_occupied<=1]] | ~ [[1<=CL_lift_rs | arm1_having_swivel_1<=1]]] | [table_stop_v<=0 & ~ [[press_at_lower_pos<=CL_in | A1U_ret_rs<=ch_A2D_free]]]]] & [[A2U_ext_rs<=deposit_belt_occupied & ~ [[[[A1L_out<=0 | A1U_ret_rs<=feed_belt_idle] & [crane_stop_v<=0 & 1<=A1_extended]] | [[A1L_ret_rs<=1 | A1L_ext_rs<=A1L_rot2_rs] | [CL_lift_run<=A1L_rot1_in & CU_unloaded<=belt2_start]]]]] & crane_stop_h<=DB_trans_rs]]]]]
normalized: ~ [E [true U ~ [[[[[crane_stop_h<=DB_trans_rs & [A2U_ext_rs<=deposit_belt_occupied & ~ [[[[CL_lift_run<=A1L_rot1_in & CU_unloaded<=belt2_start] | [A1L_ret_rs<=1 | A1L_ext_rs<=A1L_rot2_rs]] | [[crane_stop_v<=0 & 1<=A1_extended] & [A1L_out<=0 | A1U_ret_rs<=feed_belt_idle]]]]]] & ~ [[[table_stop_v<=0 & ~ [[press_at_lower_pos<=CL_in | A1U_ret_rs<=ch_A2D_free]]] | [~ [[1<=CL_lift_rs | arm1_having_swivel_1<=1]] | [[arm1_release_ext<=crane_above_feed_belt & deposit_belt_occupied<=1] & [1<=ch_DC_full | A1U_rot1_rs<=crane_to_belt1]]]]]] | ~ [[press_at_upper_pos<=A2U_unloaded & [[feed_belt_occupied<=1 & ~ [1<=deposit_belt_empty]] & ~ [[1<=crane_storing | 1<=FB_in]]]]]] | [table_unload_angle<=1 & [1<=A1L_rot2_run | [~ [[1<=A2L_ret_run & arm2_waiting_for_swivel_2<=arm1_pick_up_ext]] & [[[[~ [ch_TA1_full<=A2U_rot1_rs] & [1<=arm2_pick_up_ext | 1<=A2U_rot2_in]] | ~ [crane_to_belt1<=ch_A2D_full]] | [~ [[1<=ch_A2D_free | 1<=CU_lift_rs]] | [[ch_PA2_free<=0 & CL_lower_run<=A2L_rotated] | [A1U_in<=TL_lower_run & TU_lift_rs<=A2L_ext_rs]]]] | [A2U_out<=1 | ~ [[robot_right<=crane_transport_height & ~ [arm2_magnet_on<=1]]]]]]]]]]]]
abstracting: (arm2_magnet_on<=1)
states: 1,657,242 (6)
abstracting: (robot_right<=crane_transport_height)
states: 1,625,517 (6)
abstracting: (A2U_out<=1)
states: 1,657,242 (6)
abstracting: (TU_lift_rs<=A2L_ext_rs)
states: 1,562,006 (6)
abstracting: (A1U_in<=TL_lower_run)
states: 1,642,742 (6)
abstracting: (CL_lower_run<=A2L_rotated)
states: 1,552,948 (6)
abstracting: (ch_PA2_free<=0)
states: 1,611,333 (6)
abstracting: (1<=CU_lift_rs)
states: 41,495 (4)
abstracting: (1<=ch_A2D_free)
states: 116,840 (5)
abstracting: (crane_to_belt1<=ch_A2D_full)
states: 1,536,171 (6)
abstracting: (1<=A2U_rot2_in)
states: 6,677 (3)
abstracting: (1<=arm2_pick_up_ext)
states: 35,285 (4)
abstracting: (ch_TA1_full<=A2U_rot1_rs)
states: 1,562,446 (6)
abstracting: (arm2_waiting_for_swivel_2<=arm1_pick_up_ext)
states: 1,588,391 (6)
abstracting: (1<=A2L_ret_run)
states: 14,114 (4)
abstracting: (1<=A1L_rot2_run)
states: 1,680 (3)
abstracting: (table_unload_angle<=1)
states: 1,657,242 (6)
abstracting: (1<=FB_in)
states: 10,612 (4)
abstracting: (1<=crane_storing)
states: 235,477 (5)
abstracting: (1<=deposit_belt_empty)
states: 116,840 (5)
abstracting: (feed_belt_occupied<=1)
states: 1,657,242 (6)
abstracting: (press_at_upper_pos<=A2U_unloaded)
states: 1,305,106 (6)
abstracting: (A1U_rot1_rs<=crane_to_belt1)
states: 1,650,392 (6)
abstracting: (1<=ch_DC_full)
states: 371,409 (5)
abstracting: (deposit_belt_occupied<=1)
states: 1,657,242 (6)
abstracting: (arm1_release_ext<=crane_above_feed_belt)
states: 1,640,102 (6)
abstracting: (arm1_having_swivel_1<=1)
states: 1,657,242 (6)
abstracting: (1<=CL_lift_rs)
states: 52,345 (4)
abstracting: (A1U_ret_rs<=ch_A2D_free)
states: 1,650,325 (6)
abstracting: (press_at_lower_pos<=CL_in)
states: 1,016,274 (6)
abstracting: (table_stop_v<=0)
states: 390,900 (5)
abstracting: (A1U_ret_rs<=feed_belt_idle)
states: 1,654,672 (6)
abstracting: (A1L_out<=0)
states: 1,650,536 (6)
abstracting: (1<=A1_extended)
states: 6,706 (3)
abstracting: (crane_stop_v<=0)
states: 563,040 (5)
abstracting: (A1L_ext_rs<=A1L_rot2_rs)
states: 1,650,536 (6)
abstracting: (A1L_ret_rs<=1)
states: 1,657,242 (6)
abstracting: (CU_unloaded<=belt2_start)
states: 1,627,495 (6)
abstracting: (CL_lift_run<=A1L_rot1_in)
states: 1,552,868 (6)
abstracting: (A2U_ext_rs<=deposit_belt_occupied)
states: 1,632,725 (6)
abstracting: (crane_stop_h<=DB_trans_rs)
states: 319,644 (5)
-> the formula is FALSE
FORMULA ParamProductionCell-PT-5-ReachabilityCardinality-14 FALSE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.618sec
checking: EF [[[[1<=crane_pick_up_height & [[[arm1_release_angle<=ch_A1P_free | forge_rs<=1] & ~ [deposit_belt_idle<=A2U_ret_rs]] & [~ [[1<=press_at_middle_pos & [belt1_stop<=0 | ~ [1<=arm1_store_free]]]] & [~ [[~ [arm2_pick_up_ext<=TU_rot_run] | ~ [press_ready_for_unloading<=1]]] & [[~ [1<=A2U_rot2_in] & ~ [DB_trans_run<=0]] | [[ch_PA2_full<=1 & table_at_unload_angle<=0] & ~ [A2L_in<=table_ready_for_loading]]]]]]] | [[[[~ [A2L_rot3_rs<=A2U_rot3_in] | [[[CL_ready_to_grasp<=0 & 1<=A2L_rot1_rs] & 1<=CL_ready_to_transport] | ~ [deposit_belt_occupied<=FB_out]]] & FB_trans_run<=A1_extended] & [[[1<=arm2_waiting_for_swivel_1 & arm1_pick_up_angle<=ch_PA2_free] & ~ [[~ [1<=A2U_out] & [1<=arm1_release_angle | belt2_stop<=A2L_ext_rs]]]] | [[[[1<=arm1_magnet_on & ch_A1P_free<=TL_lower_run] & [1<=crane_above_deposit_belt | TL_rot_run<=crane_lower]] | [~ [A1U_rot2_rs<=A2U_rot1_run] | A2L_in<=1]] & [[[arm2_pick_up_ext<=A1L_rot3_rs & 1<=arm2_retract_ext] & [1<=crane_above_deposit_belt & TL_rot_rs<=0]] & table_at_unload_angle<=0]]]] | [[arm2_magnet_off<=A1L_ext_run | ~ [table_load_angle<=1]] & ~ [[[~ [[1<=CU_trans_run | belt1_start<=1]] & ~ [1<=A1U_rot2_run]] | ~ [[CU_lift_rs<=0 | table_right<=0]]]]]]] & ~ [[[CL_lower_rs<=1 | [[1<=A2U_out | ~ [1<=CU_lift_rs]] & [[CU_trans_rs<=CL_ready_to_transport | 1<=A2U_rot1_rs] & [1<=belt1_start & TL_lower_run<=TL_lower_rs]]]] | [1<=arm2_retract_ext | [[[1<=CU_trans_rs & 1<=belt1_light_barrier_false] | ~ [DB_deliver_rs<=0]] & ~ [[arm2_backward<=1 | arm1_having_swivel_1<=1]]]]]]]]
normalized: E [true U [~ [[[1<=arm2_retract_ext | [~ [[arm2_backward<=1 | arm1_having_swivel_1<=1]] & [~ [DB_deliver_rs<=0] | [1<=CU_trans_rs & 1<=belt1_light_barrier_false]]]] | [CL_lower_rs<=1 | [[[1<=belt1_start & TL_lower_run<=TL_lower_rs] & [CU_trans_rs<=CL_ready_to_transport | 1<=A2U_rot1_rs]] & [1<=A2U_out | ~ [1<=CU_lift_rs]]]]]] & [[[~ [[~ [[CU_lift_rs<=0 | table_right<=0]] | [~ [1<=A1U_rot2_run] & ~ [[1<=CU_trans_run | belt1_start<=1]]]]] & [arm2_magnet_off<=A1L_ext_run | ~ [table_load_angle<=1]]] | [[[[table_at_unload_angle<=0 & [[1<=crane_above_deposit_belt & TL_rot_rs<=0] & [arm2_pick_up_ext<=A1L_rot3_rs & 1<=arm2_retract_ext]]] & [[A2L_in<=1 | ~ [A1U_rot2_rs<=A2U_rot1_run]] | [[1<=crane_above_deposit_belt | TL_rot_run<=crane_lower] & [1<=arm1_magnet_on & ch_A1P_free<=TL_lower_run]]]] | [~ [[[1<=arm1_release_angle | belt2_stop<=A2L_ext_rs] & ~ [1<=A2U_out]]] & [1<=arm2_waiting_for_swivel_1 & arm1_pick_up_angle<=ch_PA2_free]]] & [FB_trans_run<=A1_extended & [[~ [deposit_belt_occupied<=FB_out] | [1<=CL_ready_to_transport & [CL_ready_to_grasp<=0 & 1<=A2L_rot1_rs]]] | ~ [A2L_rot3_rs<=A2U_rot3_in]]]]] | [1<=crane_pick_up_height & [[[[[~ [A2L_in<=table_ready_for_loading] & [ch_PA2_full<=1 & table_at_unload_angle<=0]] | [~ [DB_trans_run<=0] & ~ [1<=A2U_rot2_in]]] & ~ [[~ [press_ready_for_unloading<=1] | ~ [arm2_pick_up_ext<=TU_rot_run]]]] & ~ [[1<=press_at_middle_pos & [belt1_stop<=0 | ~ [1<=arm1_store_free]]]]] & [~ [deposit_belt_idle<=A2U_ret_rs] & [arm1_release_angle<=ch_A1P_free | forge_rs<=1]]]]]]]
abstracting: (forge_rs<=1)
states: 1,657,242 (6)
abstracting: (arm1_release_angle<=ch_A1P_free)
states: 1,336,777 (6)
abstracting: (deposit_belt_idle<=A2U_ret_rs)
states: 820,291 (5)
abstracting: (1<=arm1_store_free)
states: 256,673 (5)
abstracting: (belt1_stop<=0)
states: 63,672 (4)
abstracting: (1<=press_at_middle_pos)
states: 636,234 (5)
abstracting: (arm2_pick_up_ext<=TU_rot_run)
states: 1,626,677 (6)
abstracting: (press_ready_for_unloading<=1)
states: 1,657,242 (6)
abstracting: (1<=A2U_rot2_in)
states: 6,677 (3)
abstracting: (DB_trans_run<=0)
states: 1,569,246 (6)
abstracting: (table_at_unload_angle<=0)
states: 1,561,534 (6)
abstracting: (ch_PA2_full<=1)
states: 1,657,242 (6)
abstracting: (A2L_in<=table_ready_for_loading)
states: 1,645,126 (6)
abstracting: (1<=crane_pick_up_height)
states: 261,725 (5)
abstracting: (A2L_rot3_rs<=A2U_rot3_in)
states: 1,650,185 (6)
abstracting: (1<=A2L_rot1_rs)
states: 5,579 (3)
abstracting: (CL_ready_to_grasp<=0)
states: 1,604,897 (6)
abstracting: (1<=CL_ready_to_transport)
states: 52,345 (4)
abstracting: (deposit_belt_occupied<=FB_out)
states: 1,376,684 (6)
abstracting: (FB_trans_run<=A1_extended)
states: 1,636,018 (6)
abstracting: (arm1_pick_up_angle<=ch_PA2_free)
states: 1,104,348 (6)
abstracting: (1<=arm2_waiting_for_swivel_1)
states: 23,413 (4)
abstracting: (1<=A2U_out)
states: 24,517 (4)
abstracting: (belt2_stop<=A2L_ext_rs)
states: 269,527 (5)
abstracting: (1<=arm1_release_angle)
states: 320,465 (5)
abstracting: (ch_A1P_free<=TL_lower_run)
states: 1,612,417 (6)
abstracting: (1<=arm1_magnet_on)
states: 1,184,337 (6)
abstracting: (TL_rot_run<=crane_lower)
states: 1,599,236 (6)
abstracting: (1<=crane_above_deposit_belt)
states: 808,285 (5)
abstracting: (A1U_rot2_rs<=A2U_rot1_run)
states: 1,651,104 (6)
abstracting: (A2L_in<=1)
states: 1,657,242 (6)
abstracting: (1<=arm2_retract_ext)
states: 1,499,372 (6)
abstracting: (arm2_pick_up_ext<=A1L_rot3_rs)
states: 1,621,957 (6)
abstracting: (TL_rot_rs<=0)
states: 1,622,650 (6)
abstracting: (1<=crane_above_deposit_belt)
states: 808,285 (5)
abstracting: (table_at_unload_angle<=0)
states: 1,561,534 (6)
abstracting: (table_load_angle<=1)
states: 1,657,242 (6)
abstracting: (arm2_magnet_off<=A1L_ext_run)
states: 1,002,655 (6)
abstracting: (belt1_start<=1)
states: 1,657,242 (6)
abstracting: (1<=CU_trans_run)
states: 82,990 (4)
abstracting: (1<=A1U_rot2_run)
states: 12,276 (4)
abstracting: (table_right<=0)
states: 1,266,342 (6)
abstracting: (CU_lift_rs<=0)
states: 1,615,747 (6)
abstracting: (1<=CU_lift_rs)
states: 41,495 (4)
abstracting: (1<=A2U_out)
states: 24,517 (4)
abstracting: (1<=A2U_rot1_rs)
states: 17,672 (4)
abstracting: (CU_trans_rs<=CL_ready_to_transport)
states: 1,615,747 (6)
abstracting: (TL_lower_run<=TL_lower_rs)
states: 1,588,058 (6)
abstracting: (1<=belt1_start)
states: 63,672 (4)
abstracting: (CL_lower_rs<=1)
states: 1,657,242 (6)
abstracting: (1<=belt1_light_barrier_false)
states: 1,614,794 (6)
abstracting: (1<=CU_trans_rs)
states: 41,495 (4)
abstracting: (DB_deliver_rs<=0)
states: 1,613,244 (6)
abstracting: (arm1_having_swivel_1<=1)
states: 1,657,242 (6)
abstracting: (arm2_backward<=1)
states: 1,657,242 (6)
abstracting: (1<=arm2_retract_ext)
states: 1,499,372 (6)
-> the formula is FALSE
FORMULA ParamProductionCell-PT-5-ReachabilityCardinality-05 FALSE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.283sec
checking: AG [[[[CL_ready_to_transport<=A2L_rot2_run & robot_left<=A2U_ext_run] | [[~ [[~ [[~ [1<=ch_TA1_full] | belt2_light_barrier_true<=DB_at_end]] | [[~ [CL_trans_run<=press_ready_for_loading] & A2U_in<=crane_pick_up_height] & ~ [[arm2_pick_up_angle<=belt2_light_barrier_true | A2U_extended<=A1L_ext_run]]]]] & 1<=arm1_pick_up_ext] & ~ [[[crane_to_belt2<=A2U_out & [~ [[arm1_magnet_off<=crane_stop_v | 1<=crane_release_height]] & ~ [1<=A1U_extendet]]] & 1<=ch_DC_full]]]] | [[[~ [belt1_start<=0] | [[[[[1<=A2U_ret_rs & 1<=CU_trans_rs] | A2U_rot3_in<=arm1_waiting_for_swivel_1] | [[DB_deliver_run<=1 & press_at_upper_pos<=0] | ch_CF_full<=0]] & [[[1<=arm1_magnet_on & arm2_magnet_off<=feed_belt_empty] & 1<=feed_belt_idle] | ~ [[1<=FB_trans_run & A1U_unloadet<=1]]]] & [[~ [[A1U_rotated<=CU_in & 1<=crane_release_height]] | [~ [A1U_rot2_run<=1] | [crane_mag_off<=crane_stop_h & 1<=crane_mag_on]]] & table_ready_for_loading<=0]]] | [[~ [[1<=A2U_unloaded & [~ [A2U_rot3_in<=0] | ~ [1<=ch_FT_free]]]] | ~ [[[A2U_rot1_in<=0 & A1L_ret_run<=press_up] | PL_lower_run<=FB_trans_run]]] | ~ [CL_in<=1]]] | [[[[[~ [press_upward<=0] & [arm1_store_free<=A2U_out | [TU_lift_run<=0 | 1<=ch_CF_full]]] & [[[arm2_release_angle<=1 | 1<=A2L_rot3_rs] | [1<=arm1_pick_up_angle & A1L_out<=A2U_rot2_rs]] | [[A2U_rot1_run<=0 & 1<=crane_release_height] & [crane_above_deposit_belt<=PU_lower_run & 1<=table_at_unload_angle]]]] & ch_FT_free<=PU_lower_rs] | 1<=crane_lower] & ~ [A1U_ret_rs<=1]]]]]
normalized: ~ [E [true U ~ [[[[[[~ [[1<=A2U_unloaded & [~ [A2U_rot3_in<=0] | ~ [1<=ch_FT_free]]]] | ~ [[PL_lower_run<=FB_trans_run | [A2U_rot1_in<=0 & A1L_ret_run<=press_up]]]] | ~ [CL_in<=1]] | [[[table_ready_for_loading<=0 & [[[crane_mag_off<=crane_stop_h & 1<=crane_mag_on] | ~ [A1U_rot2_run<=1]] | ~ [[A1U_rotated<=CU_in & 1<=crane_release_height]]]] & [[~ [[1<=FB_trans_run & A1U_unloadet<=1]] | [1<=feed_belt_idle & [1<=arm1_magnet_on & arm2_magnet_off<=feed_belt_empty]]] & [[ch_CF_full<=0 | [DB_deliver_run<=1 & press_at_upper_pos<=0]] | [A2U_rot3_in<=arm1_waiting_for_swivel_1 | [1<=A2U_ret_rs & 1<=CU_trans_rs]]]]] | ~ [belt1_start<=0]]] | [~ [A1U_ret_rs<=1] & [1<=crane_lower | [ch_FT_free<=PU_lower_rs & [[[[crane_above_deposit_belt<=PU_lower_run & 1<=table_at_unload_angle] & [A2U_rot1_run<=0 & 1<=crane_release_height]] | [[1<=arm1_pick_up_angle & A1L_out<=A2U_rot2_rs] | [arm2_release_angle<=1 | 1<=A2L_rot3_rs]]] & [[arm1_store_free<=A2U_out | [TU_lift_run<=0 | 1<=ch_CF_full]] & ~ [press_upward<=0]]]]]]] | [[~ [[1<=ch_DC_full & [crane_to_belt2<=A2U_out & [~ [1<=A1U_extendet] & ~ [[arm1_magnet_off<=crane_stop_v | 1<=crane_release_height]]]]]] & [1<=arm1_pick_up_ext & ~ [[[~ [[arm2_pick_up_angle<=belt2_light_barrier_true | A2U_extended<=A1L_ext_run]] & [A2U_in<=crane_pick_up_height & ~ [CL_trans_run<=press_ready_for_loading]]] | ~ [[belt2_light_barrier_true<=DB_at_end | ~ [1<=ch_TA1_full]]]]]]] | [CL_ready_to_transport<=A2L_rot2_run & robot_left<=A2U_ext_run]]]]]]
abstracting: (robot_left<=A2U_ext_run)
states: 1,566,423 (6)
abstracting: (CL_ready_to_transport<=A2L_rot2_run)
states: 1,604,993 (6)
abstracting: (1<=ch_TA1_full)
states: 95,708 (4)
abstracting: (belt2_light_barrier_true<=DB_at_end)
states: 1,525,248 (6)
abstracting: (CL_trans_run<=press_ready_for_loading)
states: 1,572,066 (6)
abstracting: (A2U_in<=crane_pick_up_height)
states: 1,634,248 (6)
abstracting: (A2U_extended<=A1L_ext_run)
states: 1,632,725 (6)
abstracting: (arm2_pick_up_angle<=belt2_light_barrier_true)
states: 1,442,078 (6)
abstracting: (1<=arm1_pick_up_ext)
states: 33,530 (4)
abstracting: (1<=crane_release_height)
states: 207,475 (5)
abstracting: (arm1_magnet_off<=crane_stop_v)
states: 1,502,262 (6)
abstracting: (1<=A1U_extendet)
states: 7,498 (3)
abstracting: (crane_to_belt2<=A2U_out)
states: 1,534,143 (6)
abstracting: (1<=ch_DC_full)
states: 371,409 (5)
abstracting: (press_upward<=0)
states: 1,387,719 (6)
abstracting: (1<=ch_CF_full)
states: 349,390 (5)
abstracting: (TU_lift_run<=0)
states: 1,465,826 (6)
abstracting: (arm1_store_free<=A2U_out)
states: 1,406,872 (6)
abstracting: (1<=A2L_rot3_rs)
states: 7,057 (3)
abstracting: (arm2_release_angle<=1)
states: 1,657,242 (6)
abstracting: (A1L_out<=A2U_rot2_rs)
states: 1,650,536 (6)
abstracting: (1<=arm1_pick_up_angle)
states: 571,055 (5)
abstracting: (1<=crane_release_height)
states: 207,475 (5)
abstracting: (A2U_rot1_run<=0)
states: 1,621,898 (6)
abstracting: (1<=table_at_unload_angle)
states: 95,708 (4)
abstracting: (crane_above_deposit_belt<=PU_lower_run)
states: 939,737 (5)
abstracting: (ch_FT_free<=PU_lower_rs)
states: 1,624,932 (6)
abstracting: (1<=crane_lower)
states: 281,520 (5)
abstracting: (A1U_ret_rs<=1)
states: 1,657,242 (6)
abstracting: (belt1_start<=0)
states: 1,593,570 (6)
abstracting: (1<=CU_trans_rs)
states: 41,495 (4)
abstracting: (1<=A2U_ret_rs)
states: 24,517 (4)
abstracting: (A2U_rot3_in<=arm1_waiting_for_swivel_1)
states: 1,652,616 (6)
abstracting: (press_at_upper_pos<=0)
states: 1,297,878 (6)
abstracting: (DB_deliver_run<=1)
states: 1,657,242 (6)
abstracting: (ch_CF_full<=0)
states: 1,307,852 (6)
abstracting: (arm2_magnet_off<=feed_belt_empty)
states: 1,044,908 (6)
abstracting: (1<=arm1_magnet_on)
states: 1,184,337 (6)
abstracting: (1<=feed_belt_idle)
states: 1,071,332 (6)
abstracting: (A1U_unloadet<=1)
states: 1,657,242 (6)
abstracting: (1<=FB_trans_run)
states: 21,224 (4)
abstracting: (1<=crane_release_height)
states: 207,475 (5)
abstracting: (A1U_rotated<=CU_in)
states: 1,649,942 (6)
abstracting: (A1U_rot2_run<=1)
states: 1,657,242 (6)
abstracting: (1<=crane_mag_on)
states: 914,057 (5)
abstracting: (crane_mag_off<=crane_stop_h)
states: 1,532,757 (6)
abstracting: (table_ready_for_loading<=0)
states: 1,431,434 (6)
abstracting: (CL_in<=1)
states: 1,657,242 (6)
abstracting: (A1L_ret_run<=press_up)
states: 1,644,574 (6)
abstracting: (A2U_rot1_in<=0)
states: 1,639,570 (6)
abstracting: (PL_lower_run<=FB_trans_run)
states: 1,566,252 (6)
abstracting: (1<=ch_FT_free)
states: 34,592 (4)
abstracting: (A2U_rot3_in<=0)
states: 1,652,602 (6)
abstracting: (1<=A2U_unloaded)
states: 24,517 (4)
-> the formula is FALSE
FORMULA ParamProductionCell-PT-5-ReachabilityCardinality-01 FALSE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 1.375sec
totally nodes used: 3254783 (3.3e+06)
number of garbage collections: 0
fire ops cache: hits/miss/sum: 1587136 12229236 13816372
used/not used/entry size/cache size: 12932204 54176660 16 1024MB
basic ops cache: hits/miss/sum: 523336 5027679 5551015
used/not used/entry size/cache size: 6834137 9943079 12 192MB
unary ops cache: hits/miss/sum: 0 0 0
used/not used/entry size/cache size: 0 16777216 8 128MB
abstract ops cache: hits/miss/sum: 0 0 0
used/not used/entry size/cache size: 0 16777216 12 192MB
state nr cache: hits/miss/sum: 61127 674018 735145
used/not used/entry size/cache size: 649299 7739309 32 256MB
max state cache: hits/miss/sum: 0 0 0
used/not used/entry size/cache size: 0 8388608 32 256MB
uniqueHash elements/entry size/size: 67108864 4 256MB
0 64444298
1 2179935
2 394154
3 77260
4 11516
5 1533
6 146
7 21
8 1
9 0
>= 10 0
Total processing time: 0m13.969sec
BK_STOP 1678841922563
--------------------
content from stderr:
check for maximal unmarked siphon
ok
check for constant places
ok
check if there are places and transitions
ok
check if there are transitions without pre-places
ok
check if at least one transition is enabled in m0
ok
check if there are transitions that can never fire
ok
initing FirstDep: 0m 0.001sec
iterations count:9413 (46), effective:673 (3)
initing FirstDep: 0m 0.001sec
iterations count:5498 (27), effective:315 (1)
iterations count:5699 (28), effective:331 (1)
iterations count:5406 (26), effective:316 (1)
iterations count:5292 (26), effective:320 (1)
iterations count:6852 (33), effective:429 (2)
iterations count:7658 (37), effective:495 (2)
iterations count:6957 (34), effective:401 (1)
iterations count:10378 (51), effective:628 (3)
Sequence of Actions to be Executed by the VM
This is useful if one wants to reexecute the tool in the VM from the submitted image disk.
set -x
# this is for BenchKit: configuration of major elements for the test
export BK_INPUT="ParamProductionCell-PT-5"
export BK_EXAMINATION="ReachabilityCardinality"
export BK_TOOL="marcie"
export BK_RESULT_DIR="/tmp/BK_RESULTS/OUTPUTS"
export BK_TIME_CONFINEMENT="3600"
export BK_MEMORY_CONFINEMENT="16384"
export BK_BIN_PATH="/home/mcc/BenchKit/bin/"
# this is specific to your benchmark or test
export BIN_DIR="$HOME/BenchKit/bin"
# remove the execution directoty if it exists (to avoid increse of .vmdk images)
if [ -d execution ] ; then
rm -rf execution
fi
# this is for BenchKit: explicit launching of the test
echo "====================================================================="
echo " Generated by BenchKit 2-5348"
echo " Executing tool marcie"
echo " Input is ParamProductionCell-PT-5, examination is ReachabilityCardinality"
echo " Time confinement is $BK_TIME_CONFINEMENT seconds"
echo " Memory confinement is 16384 MBytes"
echo " Number of cores is 1"
echo " Run identifier is r257-smll-167863532700406"
echo "====================================================================="
echo
echo "--------------------"
echo "preparation of the directory to be used:"
tar xzf /home/mcc/BenchKit/INPUTS/ParamProductionCell-PT-5.tgz
mv ParamProductionCell-PT-5 execution
cd execution
if [ "ReachabilityCardinality" = "ReachabilityDeadlock" ] || [ "ReachabilityCardinality" = "UpperBounds" ] || [ "ReachabilityCardinality" = "QuasiLiveness" ] || [ "ReachabilityCardinality" = "StableMarking" ] || [ "ReachabilityCardinality" = "Liveness" ] || [ "ReachabilityCardinality" = "OneSafe" ] || [ "ReachabilityCardinality" = "StateSpace" ]; then
rm -f GenericPropertiesVerdict.xml
fi
pwd
ls -lh
echo
echo "--------------------"
echo "content from stdout:"
echo
echo "=== Data for post analysis generated by BenchKit (invocation template)"
echo
if [ "ReachabilityCardinality" = "UpperBounds" ] ; then
echo "The expected result is a vector of positive values"
echo NUM_VECTOR
elif [ "ReachabilityCardinality" != "StateSpace" ] ; then
echo "The expected result is a vector of booleans"
echo BOOL_VECTOR
else
echo "no data necessary for post analysis"
fi
echo
if [ -f "ReachabilityCardinality.txt" ] ; then
echo "here is the order used to build the result vector(from text file)"
for x in $(grep Property ReachabilityCardinality.txt | cut -d ' ' -f 2 | sort -u) ; do
echo "FORMULA_NAME $x"
done
elif [ -f "ReachabilityCardinality.xml" ] ; then # for cunf (txt files deleted;-)
echo echo "here is the order used to build the result vector(from xml file)"
for x in $(grep '
echo "FORMULA_NAME $x"
done
elif [ "ReachabilityCardinality" = "ReachabilityDeadlock" ] || [ "ReachabilityCardinality" = "QuasiLiveness" ] || [ "ReachabilityCardinality" = "StableMarking" ] || [ "ReachabilityCardinality" = "Liveness" ] || [ "ReachabilityCardinality" = "OneSafe" ] ; then
echo "FORMULA_NAME ReachabilityCardinality"
fi
echo
echo "=== Now, execution of the tool begins"
echo
echo -n "BK_START "
date -u +%s%3N
echo
timeout -s 9 $BK_TIME_CONFINEMENT bash -c "/home/mcc/BenchKit/BenchKit_head.sh 2> STDERR ; echo ; echo -n \"BK_STOP \" ; date -u +%s%3N"
if [ $? -eq 137 ] ; then
echo
echo "BK_TIME_CONFINEMENT_REACHED"
fi
echo
echo "--------------------"
echo "content from stderr:"
echo
cat STDERR ;