

About the Execution of Marcie for RobotManipulation-PT-00050
| Execution Summary | |||||
| Max Memory Used (MB) |
Time wait (ms) | CPU Usage (ms) | I/O Wait (ms) | Computed Result | Execution Status |
| 16220.840 | 3600000.00 | 2118714.00 | 1404356.00 | ?FFTTTT??FFFFFTT | normal |
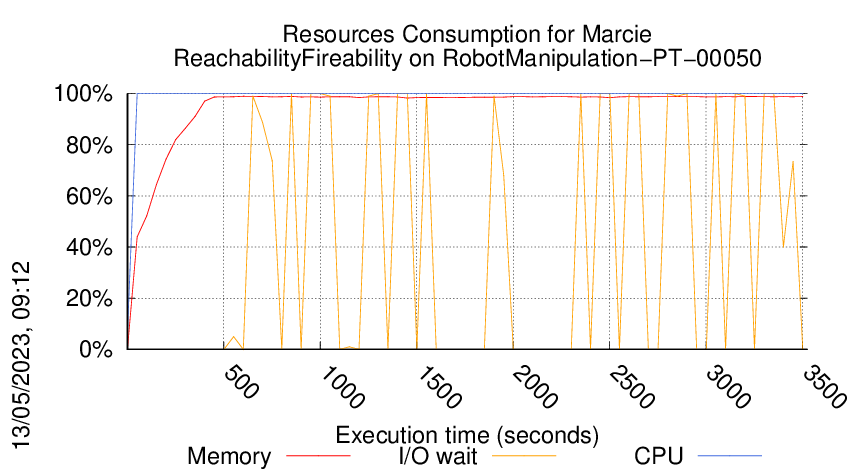
Execution Chart
We display below the execution chart for this examination (boot time has been removed).
Trace from the execution
Formatting '/data/fkordon/mcc2023-input.r353-smll-167891800400047.qcow2', fmt=qcow2 size=4294967296 backing_file=/data/fkordon/mcc2023-input.qcow2 cluster_size=65536 lazy_refcounts=off refcount_bits=16
Waiting for the VM to be ready (probing ssh)
..................
=====================================================================
Generated by BenchKit 2-5348
Executing tool marcie
Input is RobotManipulation-PT-00050, examination is ReachabilityFireability
Time confinement is 3600 seconds
Memory confinement is 16384 MBytes
Number of cores is 1
Run identifier is r353-smll-167891800400047
=====================================================================
--------------------
preparation of the directory to be used:
/home/mcc/execution
total 536K
-rw-r--r-- 1 mcc users 6.8K Feb 26 05:33 CTLCardinality.txt
-rw-r--r-- 1 mcc users 69K Feb 26 05:33 CTLCardinality.xml
-rw-r--r-- 1 mcc users 6.4K Feb 26 05:31 CTLFireability.txt
-rw-r--r-- 1 mcc users 53K Feb 26 05:31 CTLFireability.xml
-rw-r--r-- 1 mcc users 4.2K Jan 29 11:41 GenericPropertiesDefinition.xml
-rw-r--r-- 1 mcc users 6.6K Jan 29 11:41 GenericPropertiesVerdict.xml
-rw-r--r-- 1 mcc users 4.1K Feb 25 16:47 LTLCardinality.txt
-rw-r--r-- 1 mcc users 28K Feb 25 16:47 LTLCardinality.xml
-rw-r--r-- 1 mcc users 2.4K Feb 25 16:47 LTLFireability.txt
-rw-r--r-- 1 mcc users 17K Feb 25 16:47 LTLFireability.xml
-rw-r--r-- 1 mcc users 17K Feb 26 05:33 ReachabilityCardinality.txt
-rw-r--r-- 1 mcc users 178K Feb 26 05:33 ReachabilityCardinality.xml
-rw-r--r-- 1 mcc users 9.3K Feb 26 05:33 ReachabilityFireability.txt
-rw-r--r-- 1 mcc users 73K Feb 26 05:33 ReachabilityFireability.xml
-rw-r--r-- 1 mcc users 1.8K Feb 25 16:47 UpperBounds.txt
-rw-r--r-- 1 mcc users 3.8K Feb 25 16:47 UpperBounds.xml
-rw-r--r-- 1 mcc users 6 Mar 5 18:23 equiv_col
-rw-r--r-- 1 mcc users 6 Mar 5 18:23 instance
-rw-r--r-- 1 mcc users 6 Mar 5 18:23 iscolored
-rw-r--r-- 1 mcc users 6.3K Mar 5 18:23 model.pnml
--------------------
content from stdout:
=== Data for post analysis generated by BenchKit (invocation template)
The expected result is a vector of booleans
BOOL_VECTOR
here is the order used to build the result vector(from text file)
FORMULA_NAME RobotManipulation-PT-00050-ReachabilityFireability-00
FORMULA_NAME RobotManipulation-PT-00050-ReachabilityFireability-01
FORMULA_NAME RobotManipulation-PT-00050-ReachabilityFireability-02
FORMULA_NAME RobotManipulation-PT-00050-ReachabilityFireability-03
FORMULA_NAME RobotManipulation-PT-00050-ReachabilityFireability-04
FORMULA_NAME RobotManipulation-PT-00050-ReachabilityFireability-05
FORMULA_NAME RobotManipulation-PT-00050-ReachabilityFireability-06
FORMULA_NAME RobotManipulation-PT-00050-ReachabilityFireability-07
FORMULA_NAME RobotManipulation-PT-00050-ReachabilityFireability-08
FORMULA_NAME RobotManipulation-PT-00050-ReachabilityFireability-09
FORMULA_NAME RobotManipulation-PT-00050-ReachabilityFireability-10
FORMULA_NAME RobotManipulation-PT-00050-ReachabilityFireability-11
FORMULA_NAME RobotManipulation-PT-00050-ReachabilityFireability-12
FORMULA_NAME RobotManipulation-PT-00050-ReachabilityFireability-13
FORMULA_NAME RobotManipulation-PT-00050-ReachabilityFireability-14
FORMULA_NAME RobotManipulation-PT-00050-ReachabilityFireability-15
=== Now, execution of the tool begins
BK_START 1678948747197
bash -c /home/mcc/BenchKit/BenchKit_head.sh 2> STDERR ; echo ; echo -n "BK_STOP " ; date -u +%s%3N
Invoking MCC driver with
BK_TOOL=marcie
BK_EXAMINATION=ReachabilityFireability
BK_BIN_PATH=/home/mcc/BenchKit/bin/
BK_TIME_CONFINEMENT=3600
BK_INPUT=RobotManipulation-PT-00050
Not applying reductions.
Model is PT
ReachabilityFireability PT
timeout --kill-after=10s --signal=SIGINT 1m for testing only
Marcie built on Linux at 2019-11-18.
A model checker for Generalized Stochastic Petri nets
authors: Alex Tovchigrechko (IDD package and CTL model checking)
Martin Schwarick (Symbolic numerical analysis and CSL model checking)
Christian Rohr (Simulative and approximative numerical model checking)
marcie@informatik.tu-cottbus.de
called as: /home/mcc/BenchKit/bin//../marcie/bin/marcie --net-file=model.pnml --mcc-file=ReachabilityFireability.xml --memory=6 --mcc-mode
parse successfull
net created successfully
Net: RobotManipulation_PT_00050
(NrP: 15 NrTr: 11 NrArc: 34)
parse formulas
formulas created successfully
place and transition orderings generation:0m 0.000sec
net check time: 0m 0.000sec
init dd package: 0m 3.496sec
RS generation: 0m20.428sec
-> reachability set: #nodes 759117 (7.6e+05) #states 8,526,843,022,542 (12)
starting MCC model checker
--------------------------
checking: AG [IS_FIREABLE [p_start]]
normalized: ~ [E [true U ~ [IS_FIREABLE [p_start]]]]
-> the formula is FALSE
FORMULA RobotManipulation-PT-00050-ReachabilityFireability-02 FALSE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m28.553sec
checking: EF [IS_FIREABLE [r_starts]]
normalized: E [true U IS_FIREABLE [r_starts]]
-> the formula is TRUE
FORMULA RobotManipulation-PT-00050-ReachabilityFireability-04 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m14.973sec
checking: EF [IS_FIREABLE [r_stops]]
normalized: E [true U IS_FIREABLE [r_stops]]
-> the formula is TRUE
FORMULA RobotManipulation-PT-00050-ReachabilityFireability-05 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m13.184sec
checking: AG [IS_FIREABLE [r_stops]]
normalized: ~ [E [true U ~ [IS_FIREABLE [r_stops]]]]
-> the formula is FALSE
FORMULA RobotManipulation-PT-00050-ReachabilityFireability-10 FALSE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 3m43.971sec
checking: AG [~ [IS_FIREABLE [p_moved]]]
normalized: ~ [E [true U IS_FIREABLE [p_moved]]]
-> the formula is FALSE
FORMULA RobotManipulation-PT-00050-ReachabilityFireability-11 FALSE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m15.083sec
checking: AG [[IS_FIREABLE [p_sop] & IS_FIREABLE [p_intoSC]]]
normalized: ~ [E [true U ~ [[IS_FIREABLE [p_sop] & IS_FIREABLE [p_intoSC]]]]]
-> the formula is FALSE
FORMULA RobotManipulation-PT-00050-ReachabilityFireability-12 FALSE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m46.346sec
checking: EF [~ [[IS_FIREABLE [r_begin_move] | [[~ [[~ [IS_FIREABLE [p_sop]] & IS_FIREABLE [p_relSC]]] & IS_FIREABLE [p_start]] | ~ [IS_FIREABLE [r_begin_move]]]]]]
normalized: E [true U ~ [[IS_FIREABLE [r_begin_move] | [~ [IS_FIREABLE [r_begin_move]] | [IS_FIREABLE [p_start] & ~ [[IS_FIREABLE [p_relSC] & ~ [IS_FIREABLE [p_sop]]]]]]]]]
-> the formula is FALSE
FORMULA RobotManipulation-PT-00050-ReachabilityFireability-13 FALSE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m16.757sec
checking: EF [~ [[IS_FIREABLE [p_start] | [IS_FIREABLE [r_end_move] | ~ [[[~ [IS_FIREABLE [p_sop]] | [[[IS_FIREABLE [r_end_move] & IS_FIREABLE [p_relSC]] & IS_FIREABLE [p_intoSC]] | IS_FIREABLE [r_end_move]]] | IS_FIREABLE [p_moved]]]]]]]
normalized: E [true U ~ [[IS_FIREABLE [p_start] | [IS_FIREABLE [r_end_move] | ~ [[IS_FIREABLE [p_moved] | [[IS_FIREABLE [r_end_move] | [IS_FIREABLE [p_intoSC] & [IS_FIREABLE [r_end_move] & IS_FIREABLE [p_relSC]]]] | ~ [IS_FIREABLE [p_sop]]]]]]]]]
-> the formula is TRUE
FORMULA RobotManipulation-PT-00050-ReachabilityFireability-03 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 2m39.855sec
checking: EF [[~ [IS_FIREABLE [p_moved]] & ~ [[[[~ [[IS_FIREABLE [r_starts] & IS_FIREABLE [r_stops]]] | IS_FIREABLE [r_begin_move]] | IS_FIREABLE [r_starts]] | [IS_FIREABLE [r_begin_move] | [~ [IS_FIREABLE [r_starts]] & ~ [[IS_FIREABLE [r_end_move] | IS_FIREABLE [r_begin_move]]]]]]]]]
normalized: E [true U [~ [[[IS_FIREABLE [r_begin_move] | [~ [[IS_FIREABLE [r_end_move] | IS_FIREABLE [r_begin_move]]] & ~ [IS_FIREABLE [r_starts]]]] | [IS_FIREABLE [r_starts] | [IS_FIREABLE [r_begin_move] | ~ [[IS_FIREABLE [r_starts] & IS_FIREABLE [r_stops]]]]]]] & ~ [IS_FIREABLE [p_moved]]]]
before gc: list nodes free: 1081504
after gc: idd nodes used:2930930, unused:61069070; list nodes free:769890594
-> the formula is FALSE
FORMULA RobotManipulation-PT-00050-ReachabilityFireability-01 FALSE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 11m22.887sec
checking: AG [~ [[[~ [[IS_FIREABLE [r_end_move] | [~ [IS_FIREABLE [r_begin_move]] | [~ [[IS_FIREABLE [p_move] & IS_FIREABLE [p_move]]] | [~ [IS_FIREABLE [p_relSC]] | [IS_FIREABLE [r_stops] & IS_FIREABLE [p_sop]]]]]]] & ~ [[~ [IS_FIREABLE [p_intoSC]] & ~ [IS_FIREABLE [p_started]]]]] & IS_FIREABLE [r_stops]]]]
normalized: ~ [E [true U [IS_FIREABLE [r_stops] & [~ [[~ [IS_FIREABLE [p_started]] & ~ [IS_FIREABLE [p_intoSC]]]] & ~ [[IS_FIREABLE [r_end_move] | [[[[IS_FIREABLE [r_stops] & IS_FIREABLE [p_sop]] | ~ [IS_FIREABLE [p_relSC]]] | ~ [[IS_FIREABLE [p_move] & IS_FIREABLE [p_move]]]] | ~ [IS_FIREABLE [r_begin_move]]]]]]]]]
MC time: 6m49.004sec
checking: EF [[[[[[[~ [[[IS_FIREABLE [p_start] & IS_FIREABLE [p_sop]] & IS_FIREABLE [p_move]]] | ~ [[~ [IS_FIREABLE [p_moved]] | ~ [IS_FIREABLE [p_start]]]]] | ~ [[IS_FIREABLE [p_relSC] | [IS_FIREABLE [p_moved] | IS_FIREABLE [p_sop]]]]] | ~ [IS_FIREABLE [p_sop]]] | [[~ [[[[IS_FIREABLE [r_starts] & IS_FIREABLE [p_start]] & ~ [IS_FIREABLE [p_sop]]] & ~ [IS_FIREABLE [p_relSC]]]] & [[~ [[IS_FIREABLE [r_end_move] | IS_FIREABLE [p_sop]]] & ~ [[IS_FIREABLE [r_starts] & IS_FIREABLE [p_intoSC]]]] & ~ [[~ [IS_FIREABLE [r_starts]] | ~ [IS_FIREABLE [r_begin_move]]]]]] & [~ [[IS_FIREABLE [p_start] | ~ [[IS_FIREABLE [p_sop] & IS_FIREABLE [p_intoSC]]]]] | ~ [IS_FIREABLE [p_moved]]]]] & ~ [[IS_FIREABLE [p_moved] | IS_FIREABLE [p_relSC]]]] | IS_FIREABLE [p_intoSC]]]
normalized: E [true U [IS_FIREABLE [p_intoSC] | [~ [[IS_FIREABLE [p_moved] | IS_FIREABLE [p_relSC]]] & [[[~ [IS_FIREABLE [p_moved]] | ~ [[IS_FIREABLE [p_start] | ~ [[IS_FIREABLE [p_sop] & IS_FIREABLE [p_intoSC]]]]]] & [[~ [[~ [IS_FIREABLE [r_begin_move]] | ~ [IS_FIREABLE [r_starts]]]] & [~ [[IS_FIREABLE [r_starts] & IS_FIREABLE [p_intoSC]]] & ~ [[IS_FIREABLE [r_end_move] | IS_FIREABLE [p_sop]]]]] & ~ [[~ [IS_FIREABLE [p_relSC]] & [~ [IS_FIREABLE [p_sop]] & [IS_FIREABLE [r_starts] & IS_FIREABLE [p_start]]]]]]] | [~ [IS_FIREABLE [p_sop]] | [~ [[IS_FIREABLE [p_relSC] | [IS_FIREABLE [p_moved] | IS_FIREABLE [p_sop]]]] | [~ [[~ [IS_FIREABLE [p_start]] | ~ [IS_FIREABLE [p_moved]]]] | ~ [[IS_FIREABLE [p_move] & [IS_FIREABLE [p_start] & IS_FIREABLE [p_sop]]]]]]]]]]]
-> the formula is TRUE
FORMULA RobotManipulation-PT-00050-ReachabilityFireability-06 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 1m40.922sec
checking: AG [[~ [[[[[[[[IS_FIREABLE [r_starts] & IS_FIREABLE [p_move]] & ~ [IS_FIREABLE [p_sop]]] & ~ [[IS_FIREABLE [p_moved] & IS_FIREABLE [p_start]]]] | ~ [[[IS_FIREABLE [r_end_move] | IS_FIREABLE [p_relSC]] & [IS_FIREABLE [p_moved] | IS_FIREABLE [p_move]]]]] | [IS_FIREABLE [p_start] | IS_FIREABLE [r_end_move]]] | IS_FIREABLE [p_move]] | [[~ [IS_FIREABLE [r_end_move]] | IS_FIREABLE [p_move]] | [[[[~ [IS_FIREABLE [p_sop]] & ~ [IS_FIREABLE [p_relSC]]] | [[IS_FIREABLE [r_stops] | IS_FIREABLE [p_started]] & [IS_FIREABLE [r_starts] & IS_FIREABLE [p_start]]]] & IS_FIREABLE [p_started]] | ~ [[IS_FIREABLE [p_started] | [IS_FIREABLE [p_intoSC] | IS_FIREABLE [p_moved]]]]]]]] & [IS_FIREABLE [p_sop] & IS_FIREABLE [p_move]]]]
normalized: ~ [E [true U ~ [[[IS_FIREABLE [p_sop] & IS_FIREABLE [p_move]] & ~ [[[[~ [[IS_FIREABLE [p_started] | [IS_FIREABLE [p_intoSC] | IS_FIREABLE [p_moved]]]] | [IS_FIREABLE [p_started] & [[[IS_FIREABLE [r_starts] & IS_FIREABLE [p_start]] & [IS_FIREABLE [r_stops] | IS_FIREABLE [p_started]]] | [~ [IS_FIREABLE [p_relSC]] & ~ [IS_FIREABLE [p_sop]]]]]] | [IS_FIREABLE [p_move] | ~ [IS_FIREABLE [r_end_move]]]] | [IS_FIREABLE [p_move] | [[IS_FIREABLE [p_start] | IS_FIREABLE [r_end_move]] | [~ [[[IS_FIREABLE [p_moved] | IS_FIREABLE [p_move]] & [IS_FIREABLE [r_end_move] | IS_FIREABLE [p_relSC]]]] | [~ [[IS_FIREABLE [p_moved] & IS_FIREABLE [p_start]]] & [~ [IS_FIREABLE [p_sop]] & [IS_FIREABLE [r_starts] & IS_FIREABLE [p_move]]]]]]]]]]]]]
-> the formula is FALSE
FORMULA RobotManipulation-PT-00050-ReachabilityFireability-09 FALSE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m56.832sec
checking: EF [[~ [[[~ [IS_FIREABLE [p_relSC]] | ~ [[[~ [IS_FIREABLE [p_sop]] | [[IS_FIREABLE [p_move] | IS_FIREABLE [r_begin_move]] | [IS_FIREABLE [r_stops] & IS_FIREABLE [r_starts]]]] & [[[IS_FIREABLE [p_intoSC] | IS_FIREABLE [r_begin_move]] | IS_FIREABLE [p_move]] | IS_FIREABLE [p_sop]]]]] & [[[IS_FIREABLE [p_relSC] | [IS_FIREABLE [p_moved] | [[IS_FIREABLE [p_sop] & IS_FIREABLE [p_start]] & [IS_FIREABLE [p_moved] | IS_FIREABLE [p_started]]]]] | IS_FIREABLE [r_stops]] & ~ [IS_FIREABLE [p_start]]]]] | [IS_FIREABLE [p_sop] | [~ [IS_FIREABLE [p_started]] & [~ [[IS_FIREABLE [p_intoSC] | ~ [[IS_FIREABLE [r_starts] & IS_FIREABLE [r_starts]]]]] & [[~ [IS_FIREABLE [r_end_move]] & IS_FIREABLE [r_begin_move]] & IS_FIREABLE [p_relSC]]]]]]]
normalized: E [true U [[IS_FIREABLE [p_sop] | [[[IS_FIREABLE [p_relSC] & [IS_FIREABLE [r_begin_move] & ~ [IS_FIREABLE [r_end_move]]]] & ~ [[IS_FIREABLE [p_intoSC] | ~ [[IS_FIREABLE [r_starts] & IS_FIREABLE [r_starts]]]]]] & ~ [IS_FIREABLE [p_started]]]] | ~ [[[~ [IS_FIREABLE [p_start]] & [IS_FIREABLE [r_stops] | [IS_FIREABLE [p_relSC] | [IS_FIREABLE [p_moved] | [[IS_FIREABLE [p_moved] | IS_FIREABLE [p_started]] & [IS_FIREABLE [p_sop] & IS_FIREABLE [p_start]]]]]]] & [~ [[[IS_FIREABLE [p_sop] | [IS_FIREABLE [p_move] | [IS_FIREABLE [p_intoSC] | IS_FIREABLE [r_begin_move]]]] & [[[IS_FIREABLE [r_stops] & IS_FIREABLE [r_starts]] | [IS_FIREABLE [p_move] | IS_FIREABLE [r_begin_move]]] | ~ [IS_FIREABLE [p_sop]]]]] | ~ [IS_FIREABLE [p_relSC]]]]]]]
-> the formula is TRUE
FORMULA RobotManipulation-PT-00050-ReachabilityFireability-14 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 4m 9.189sec
checking: EF [~ [[[~ [[[[~ [[IS_FIREABLE [p_move] & IS_FIREABLE [p_start]]] & IS_FIREABLE [p_start]] | [[~ [IS_FIREABLE [r_stops]] | [IS_FIREABLE [p_relSC] & IS_FIREABLE [p_relSC]]] & ~ [IS_FIREABLE [p_start]]]] | IS_FIREABLE [p_relSC]]] | [IS_FIREABLE [r_begin_move] & [IS_FIREABLE [p_start] & [[[[IS_FIREABLE [r_starts] | IS_FIREABLE [r_stops]] & [IS_FIREABLE [p_relSC] | IS_FIREABLE [p_start]]] & [~ [IS_FIREABLE [r_starts]] | [IS_FIREABLE [r_begin_move] & IS_FIREABLE [p_relSC]]]] & IS_FIREABLE [r_starts]]]]] & [[~ [[[IS_FIREABLE [p_sop] & ~ [IS_FIREABLE [p_move]]] & IS_FIREABLE [r_end_move]]] | [~ [IS_FIREABLE [p_intoSC]] | [IS_FIREABLE [p_started] | [~ [[IS_FIREABLE [p_relSC] | IS_FIREABLE [p_sop]]] & [[IS_FIREABLE [p_intoSC] | IS_FIREABLE [p_relSC]] | [IS_FIREABLE [p_move] & IS_FIREABLE [r_stops]]]]]]] & [~ [[[[[IS_FIREABLE [p_started] & IS_FIREABLE [p_move]] | [IS_FIREABLE [p_sop] | IS_FIREABLE [p_started]]] | IS_FIREABLE [p_relSC]] | [IS_FIREABLE [p_intoSC] & IS_FIREABLE [p_intoSC]]]] & IS_FIREABLE [r_starts]]]]]]
normalized: E [true U ~ [[[[IS_FIREABLE [r_starts] & ~ [[[IS_FIREABLE [p_intoSC] & IS_FIREABLE [p_intoSC]] | [IS_FIREABLE [p_relSC] | [[IS_FIREABLE [p_sop] | IS_FIREABLE [p_started]] | [IS_FIREABLE [p_started] & IS_FIREABLE [p_move]]]]]]] & [[[IS_FIREABLE [p_started] | [[[IS_FIREABLE [p_move] & IS_FIREABLE [r_stops]] | [IS_FIREABLE [p_intoSC] | IS_FIREABLE [p_relSC]]] & ~ [[IS_FIREABLE [p_relSC] | IS_FIREABLE [p_sop]]]]] | ~ [IS_FIREABLE [p_intoSC]]] | ~ [[IS_FIREABLE [r_end_move] & [IS_FIREABLE [p_sop] & ~ [IS_FIREABLE [p_move]]]]]]] & [[IS_FIREABLE [r_begin_move] & [IS_FIREABLE [p_start] & [IS_FIREABLE [r_starts] & [[[IS_FIREABLE [r_begin_move] & IS_FIREABLE [p_relSC]] | ~ [IS_FIREABLE [r_starts]]] & [[IS_FIREABLE [p_relSC] | IS_FIREABLE [p_start]] & [IS_FIREABLE [r_starts] | IS_FIREABLE [r_stops]]]]]]] | ~ [[IS_FIREABLE [p_relSC] | [[~ [IS_FIREABLE [p_start]] & [[IS_FIREABLE [p_relSC] & IS_FIREABLE [p_relSC]] | ~ [IS_FIREABLE [r_stops]]]] | [IS_FIREABLE [p_start] & ~ [[IS_FIREABLE [p_move] & IS_FIREABLE [p_start]]]]]]]]]]]
-> the formula is TRUE
FORMULA RobotManipulation-PT-00050-ReachabilityFireability-15 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 2m21.946sec
checking: EF [[[[[[[[[[IS_FIREABLE [r_begin_move] | IS_FIREABLE [p_sop]] & ~ [IS_FIREABLE [r_stops]]] | [~ [IS_FIREABLE [p_start]] | ~ [IS_FIREABLE [p_relSC]]]] & [[[IS_FIREABLE [p_moved] & IS_FIREABLE [p_started]] | [IS_FIREABLE [r_starts] | IS_FIREABLE [p_relSC]]] & ~ [IS_FIREABLE [p_moved]]]] & [~ [[[IS_FIREABLE [r_stops] & IS_FIREABLE [r_begin_move]] | [IS_FIREABLE [r_stops] | IS_FIREABLE [r_stops]]]] | [[[IS_FIREABLE [r_begin_move] & IS_FIREABLE [p_moved]] & [IS_FIREABLE [r_starts] | IS_FIREABLE [p_relSC]]] & [~ [IS_FIREABLE [r_stops]] | IS_FIREABLE [r_begin_move]]]]] & ~ [[[IS_FIREABLE [p_move] | [[IS_FIREABLE [p_intoSC] | IS_FIREABLE [r_begin_move]] & [IS_FIREABLE [r_begin_move] & IS_FIREABLE [p_started]]]] | IS_FIREABLE [p_started]]]] & ~ [[[IS_FIREABLE [p_relSC] & [[IS_FIREABLE [p_relSC] | [IS_FIREABLE [p_started] | IS_FIREABLE [p_start]]] & [~ [IS_FIREABLE [p_sop]] | [IS_FIREABLE [r_starts] & IS_FIREABLE [r_starts]]]]] & IS_FIREABLE [p_intoSC]]]] & ~ [IS_FIREABLE [p_moved]]] & [[IS_FIREABLE [p_started] & ~ [IS_FIREABLE [p_moved]]] | IS_FIREABLE [p_sop]]]]
normalized: E [true U [[IS_FIREABLE [p_sop] | [IS_FIREABLE [p_started] & ~ [IS_FIREABLE [p_moved]]]] & [~ [IS_FIREABLE [p_moved]] & [~ [[IS_FIREABLE [p_intoSC] & [IS_FIREABLE [p_relSC] & [[[IS_FIREABLE [r_starts] & IS_FIREABLE [r_starts]] | ~ [IS_FIREABLE [p_sop]]] & [IS_FIREABLE [p_relSC] | [IS_FIREABLE [p_started] | IS_FIREABLE [p_start]]]]]]] & [~ [[IS_FIREABLE [p_started] | [IS_FIREABLE [p_move] | [[IS_FIREABLE [r_begin_move] & IS_FIREABLE [p_started]] & [IS_FIREABLE [p_intoSC] | IS_FIREABLE [r_begin_move]]]]]] & [[[[IS_FIREABLE [r_begin_move] | ~ [IS_FIREABLE [r_stops]]] & [[IS_FIREABLE [r_starts] | IS_FIREABLE [p_relSC]] & [IS_FIREABLE [r_begin_move] & IS_FIREABLE [p_moved]]]] | ~ [[[IS_FIREABLE [r_stops] | IS_FIREABLE [r_stops]] | [IS_FIREABLE [r_stops] & IS_FIREABLE [r_begin_move]]]]] & [[~ [IS_FIREABLE [p_moved]] & [[IS_FIREABLE [r_starts] | IS_FIREABLE [p_relSC]] | [IS_FIREABLE [p_moved] & IS_FIREABLE [p_started]]]] & [[~ [IS_FIREABLE [p_relSC]] | ~ [IS_FIREABLE [p_start]]] | [~ [IS_FIREABLE [r_stops]] & [IS_FIREABLE [r_begin_move] | IS_FIREABLE [p_sop]]]]]]]]]]]
TIME LIMIT: Killed by timeout after 3600 seconds
MemTotal: 16393916 kB
MemFree: 162764 kB
After kill :
MemTotal: 16393916 kB
MemFree: 13083748 kB
BK_TIME_CONFINEMENT_REACHED
--------------------
content from stderr:
check for maximal unmarked siphon
ok
check for constant places
ok
check if there are places and transitions
ok
check if there are transitions without pre-places
ok
check if at least one transition is enabled in m0
ok
check if there are transitions that can never fire
ok
initing FirstDep: 0m 0.000sec
iterations count:4213 (383), effective:1001 (91)
initing FirstDep: 0m 0.000sec
iterations count:213 (19), effective:101 (9)
iterations count:51 (4), effective:9 (0)
iterations count:52 (4), effective:9 (0)
iterations count:311 (28), effective:100 (9)
iterations count:44 (4), effective:9 (0)
iterations count:411 (37), effective:100 (9)
iterations count:814 (74), effective:302 (27)
sat_reach.icc:155: Timeout: after 339 sec
iterations count:38 (3), effective:6 (0)
iterations count:11 (1), effective:0 (0)
iterations count:336 (30), effective:105 (9)
iterations count:312 (28), effective:100 (9)
sat_reach.icc:155: Timeout: after 471 sec
Sequence of Actions to be Executed by the VM
This is useful if one wants to reexecute the tool in the VM from the submitted image disk.
set -x
# this is for BenchKit: configuration of major elements for the test
export BK_INPUT="RobotManipulation-PT-00050"
export BK_EXAMINATION="ReachabilityFireability"
export BK_TOOL="marcie"
export BK_RESULT_DIR="/tmp/BK_RESULTS/OUTPUTS"
export BK_TIME_CONFINEMENT="3600"
export BK_MEMORY_CONFINEMENT="16384"
export BK_BIN_PATH="/home/mcc/BenchKit/bin/"
# this is specific to your benchmark or test
export BIN_DIR="$HOME/BenchKit/bin"
# remove the execution directoty if it exists (to avoid increse of .vmdk images)
if [ -d execution ] ; then
rm -rf execution
fi
# this is for BenchKit: explicit launching of the test
echo "====================================================================="
echo " Generated by BenchKit 2-5348"
echo " Executing tool marcie"
echo " Input is RobotManipulation-PT-00050, examination is ReachabilityFireability"
echo " Time confinement is $BK_TIME_CONFINEMENT seconds"
echo " Memory confinement is 16384 MBytes"
echo " Number of cores is 1"
echo " Run identifier is r353-smll-167891800400047"
echo "====================================================================="
echo
echo "--------------------"
echo "preparation of the directory to be used:"
tar xzf /home/mcc/BenchKit/INPUTS/RobotManipulation-PT-00050.tgz
mv RobotManipulation-PT-00050 execution
cd execution
if [ "ReachabilityFireability" = "ReachabilityDeadlock" ] || [ "ReachabilityFireability" = "UpperBounds" ] || [ "ReachabilityFireability" = "QuasiLiveness" ] || [ "ReachabilityFireability" = "StableMarking" ] || [ "ReachabilityFireability" = "Liveness" ] || [ "ReachabilityFireability" = "OneSafe" ] || [ "ReachabilityFireability" = "StateSpace" ]; then
rm -f GenericPropertiesVerdict.xml
fi
pwd
ls -lh
echo
echo "--------------------"
echo "content from stdout:"
echo
echo "=== Data for post analysis generated by BenchKit (invocation template)"
echo
if [ "ReachabilityFireability" = "UpperBounds" ] ; then
echo "The expected result is a vector of positive values"
echo NUM_VECTOR
elif [ "ReachabilityFireability" != "StateSpace" ] ; then
echo "The expected result is a vector of booleans"
echo BOOL_VECTOR
else
echo "no data necessary for post analysis"
fi
echo
if [ -f "ReachabilityFireability.txt" ] ; then
echo "here is the order used to build the result vector(from text file)"
for x in $(grep Property ReachabilityFireability.txt | cut -d ' ' -f 2 | sort -u) ; do
echo "FORMULA_NAME $x"
done
elif [ -f "ReachabilityFireability.xml" ] ; then # for cunf (txt files deleted;-)
echo echo "here is the order used to build the result vector(from xml file)"
for x in $(grep '
echo "FORMULA_NAME $x"
done
elif [ "ReachabilityFireability" = "ReachabilityDeadlock" ] || [ "ReachabilityFireability" = "QuasiLiveness" ] || [ "ReachabilityFireability" = "StableMarking" ] || [ "ReachabilityFireability" = "Liveness" ] || [ "ReachabilityFireability" = "OneSafe" ] ; then
echo "FORMULA_NAME ReachabilityFireability"
fi
echo
echo "=== Now, execution of the tool begins"
echo
echo -n "BK_START "
date -u +%s%3N
echo
timeout -s 9 $BK_TIME_CONFINEMENT bash -c "/home/mcc/BenchKit/BenchKit_head.sh 2> STDERR ; echo ; echo -n \"BK_STOP \" ; date -u +%s%3N"
if [ $? -eq 137 ] ; then
echo
echo "BK_TIME_CONFINEMENT_REACHED"
fi
echo
echo "--------------------"
echo "content from stderr:"
echo
cat STDERR ;