

About the Execution of Marcie for ParamProductionCell-PT-4
| Execution Summary | |||||
| Max Memory Used (MB) |
Time wait (ms) | CPU Usage (ms) | I/O Wait (ms) | Computed Result | Execution Status |
| 5696.256 | 19665.00 | 19070.00 | 0.00 | FFFFTTFFFTTTFTFT | normal |
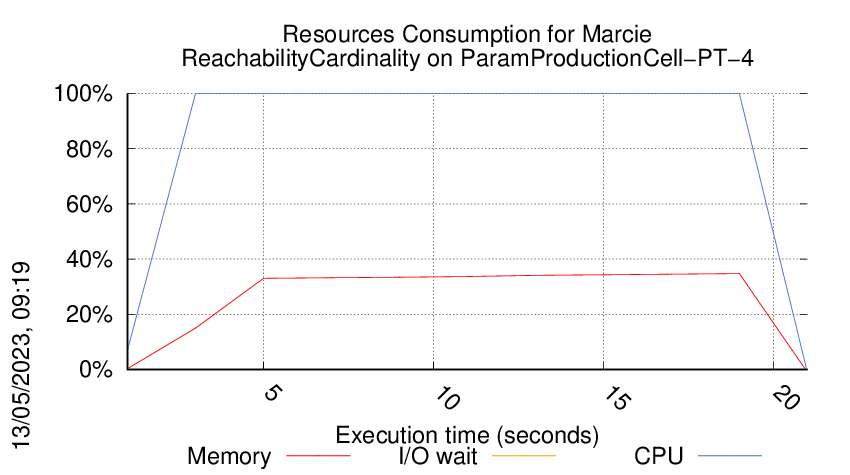
Execution Chart
We display below the execution chart for this examination (boot time has been removed).
Trace from the execution
Formatting '/data/fkordon/mcc2023-input.r257-smll-167863532700398.qcow2', fmt=qcow2 size=4294967296 backing_file=/data/fkordon/mcc2023-input.qcow2 cluster_size=65536 lazy_refcounts=off refcount_bits=16
Waiting for the VM to be ready (probing ssh)
.............................................................
=====================================================================
Generated by BenchKit 2-5348
Executing tool marcie
Input is ParamProductionCell-PT-4, examination is ReachabilityCardinality
Time confinement is 3600 seconds
Memory confinement is 16384 MBytes
Number of cores is 1
Run identifier is r257-smll-167863532700398
=====================================================================
--------------------
preparation of the directory to be used:
/home/mcc/execution
total 652K
-rw-r--r-- 1 mcc users 9.3K Feb 26 17:17 CTLCardinality.txt
-rw-r--r-- 1 mcc users 86K Feb 26 17:17 CTLCardinality.xml
-rw-r--r-- 1 mcc users 7.0K Feb 26 17:16 CTLFireability.txt
-rw-r--r-- 1 mcc users 58K Feb 26 17:16 CTLFireability.xml
-rw-r--r-- 1 mcc users 4.2K Jan 29 11:40 GenericPropertiesDefinition.xml
-rw-r--r-- 1 mcc users 6.2K Jan 29 11:40 GenericPropertiesVerdict.xml
-rw-r--r-- 1 mcc users 4.8K Feb 25 16:30 LTLCardinality.txt
-rw-r--r-- 1 mcc users 29K Feb 25 16:30 LTLCardinality.xml
-rw-r--r-- 1 mcc users 2.8K Feb 25 16:30 LTLFireability.txt
-rw-r--r-- 1 mcc users 18K Feb 25 16:30 LTLFireability.xml
-rw-r--r-- 1 mcc users 14K Feb 26 17:19 ReachabilityCardinality.txt
-rw-r--r-- 1 mcc users 117K Feb 26 17:19 ReachabilityCardinality.xml
-rw-r--r-- 1 mcc users 9.1K Feb 26 17:18 ReachabilityFireability.txt
-rw-r--r-- 1 mcc users 58K Feb 26 17:18 ReachabilityFireability.xml
-rw-r--r-- 1 mcc users 1.9K Feb 25 16:30 UpperBounds.txt
-rw-r--r-- 1 mcc users 3.9K Feb 25 16:30 UpperBounds.xml
-rw-r--r-- 1 mcc users 6 Mar 5 18:23 equiv_col
-rw-r--r-- 1 mcc users 2 Mar 5 18:23 instance
-rw-r--r-- 1 mcc users 6 Mar 5 18:23 iscolored
-rw-r--r-- 1 mcc users 174K Mar 5 18:23 model.pnml
--------------------
content from stdout:
=== Data for post analysis generated by BenchKit (invocation template)
The expected result is a vector of booleans
BOOL_VECTOR
here is the order used to build the result vector(from text file)
FORMULA_NAME ParamProductionCell-PT-4-ReachabilityCardinality-00
FORMULA_NAME ParamProductionCell-PT-4-ReachabilityCardinality-01
FORMULA_NAME ParamProductionCell-PT-4-ReachabilityCardinality-02
FORMULA_NAME ParamProductionCell-PT-4-ReachabilityCardinality-03
FORMULA_NAME ParamProductionCell-PT-4-ReachabilityCardinality-04
FORMULA_NAME ParamProductionCell-PT-4-ReachabilityCardinality-05
FORMULA_NAME ParamProductionCell-PT-4-ReachabilityCardinality-06
FORMULA_NAME ParamProductionCell-PT-4-ReachabilityCardinality-07
FORMULA_NAME ParamProductionCell-PT-4-ReachabilityCardinality-08
FORMULA_NAME ParamProductionCell-PT-4-ReachabilityCardinality-09
FORMULA_NAME ParamProductionCell-PT-4-ReachabilityCardinality-10
FORMULA_NAME ParamProductionCell-PT-4-ReachabilityCardinality-11
FORMULA_NAME ParamProductionCell-PT-4-ReachabilityCardinality-12
FORMULA_NAME ParamProductionCell-PT-4-ReachabilityCardinality-13
FORMULA_NAME ParamProductionCell-PT-4-ReachabilityCardinality-14
FORMULA_NAME ParamProductionCell-PT-4-ReachabilityCardinality-15
=== Now, execution of the tool begins
BK_START 1678841657346
bash -c /home/mcc/BenchKit/BenchKit_head.sh 2> STDERR ; echo ; echo -n "BK_STOP " ; date -u +%s%3N
Invoking MCC driver with
BK_TOOL=marcie
BK_EXAMINATION=ReachabilityCardinality
BK_BIN_PATH=/home/mcc/BenchKit/bin/
BK_TIME_CONFINEMENT=3600
BK_INPUT=ParamProductionCell-PT-4
Not applying reductions.
Model is PT
ReachabilityCardinality PT
timeout --kill-after=10s --signal=SIGINT 1m for testing only
Marcie built on Linux at 2019-11-18.
A model checker for Generalized Stochastic Petri nets
authors: Alex Tovchigrechko (IDD package and CTL model checking)
Martin Schwarick (Symbolic numerical analysis and CSL model checking)
Christian Rohr (Simulative and approximative numerical model checking)
marcie@informatik.tu-cottbus.de
called as: /home/mcc/BenchKit/bin//../marcie/bin/marcie --net-file=model.pnml --mcc-file=ReachabilityCardinality.xml --memory=6 --mcc-mode
parse successfull
net created successfully
Net: ParamProductionCell_PT_4
(NrP: 231 NrTr: 202 NrArc: 846)
parse formulas
formulas created successfully
place and transition orderings generation:0m 0.007sec
net check time: 0m 0.000sec
init dd package: 0m 4.569sec
RS generation: 0m 1.288sec
-> reachability set: #nodes 13511 (1.4e+04) #states 2,409,739 (6)
starting MCC model checker
--------------------------
checking: EF [~ [press_ready_for_unloading<=1]]
normalized: E [true U ~ [press_ready_for_unloading<=1]]
abstracting: (press_ready_for_unloading<=1)
states: 2,409,739 (6)
-> the formula is FALSE
FORMULA ParamProductionCell-PT-4-ReachabilityCardinality-06 FALSE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.001sec
checking: EF [1<=arm1_release_angle]
normalized: E [true U 1<=arm1_release_angle]
abstracting: (1<=arm1_release_angle)
states: 539,325 (5)
-> the formula is TRUE
FORMULA ParamProductionCell-PT-4-ReachabilityCardinality-10 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.797sec
checking: AG [A2U_rot2_run<=0]
normalized: ~ [E [true U ~ [A2U_rot2_run<=0]]]
abstracting: (A2U_rot2_run<=0)
states: 2,382,283 (6)
-> the formula is FALSE
FORMULA ParamProductionCell-PT-4-ReachabilityCardinality-12 FALSE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.310sec
checking: AG [A2L_out<=ch_PA2_full]
normalized: ~ [E [true U ~ [A2L_out<=ch_PA2_full]]]
abstracting: (A2L_out<=ch_PA2_full)
states: 2,398,227 (6)
-> the formula is FALSE
FORMULA ParamProductionCell-PT-4-ReachabilityCardinality-01 FALSE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.206sec
checking: AG [[A1U_out<=0 | FB_deliver_run<=A1U_ret_rs]]
normalized: ~ [E [true U ~ [[A1U_out<=0 | FB_deliver_run<=A1U_ret_rs]]]]
abstracting: (FB_deliver_run<=A1U_ret_rs)
states: 2,373,329 (6)
abstracting: (A1U_out<=0)
states: 2,397,381 (6)
-> the formula is FALSE
FORMULA ParamProductionCell-PT-4-ReachabilityCardinality-02 FALSE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.628sec
checking: AG [[A1U_ret_run<=arm1_waiting_for_swivel_2 | 1<=A1U_rotated]]
normalized: ~ [E [true U ~ [[A1U_ret_run<=arm1_waiting_for_swivel_2 | 1<=A1U_rotated]]]]
abstracting: (1<=A1U_rotated)
states: 12,358 (4)
abstracting: (A1U_ret_run<=arm1_waiting_for_swivel_2)
states: 2,385,023 (6)
-> the formula is FALSE
FORMULA ParamProductionCell-PT-4-ReachabilityCardinality-07 FALSE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.116sec
checking: EF [~ [[~ [[~ [table_stop_h<=FB_in] | 1<=CL_in]] | A2L_loaded<=arm1_backward]]]
normalized: E [true U ~ [[A2L_loaded<=arm1_backward | ~ [[1<=CL_in | ~ [table_stop_h<=FB_in]]]]]]
abstracting: (table_stop_h<=FB_in)
states: 573,805 (5)
abstracting: (1<=CL_in)
states: 75,240 (4)
abstracting: (A2L_loaded<=arm1_backward)
states: 2,398,227 (6)
-> the formula is TRUE
FORMULA ParamProductionCell-PT-4-ReachabilityCardinality-11 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.201sec
checking: AG [[[~ [[[A2U_rot2_rs<=A2L_rot2_in | 1<=belt1_light_barrier_true] & [DB_trans_run<=DB_deliver_run & 1<=arm2_pick_up_angle]]] | A1U_rotated<=1] | ~ [1<=A1U_rot1_rs]]]
normalized: ~ [E [true U ~ [[[A1U_rotated<=1 | ~ [[[DB_trans_run<=DB_deliver_run & 1<=arm2_pick_up_angle] & [A2U_rot2_rs<=A2L_rot2_in | 1<=belt1_light_barrier_true]]]] | ~ [1<=A1U_rot1_rs]]]]]
abstracting: (1<=A1U_rot1_rs)
states: 12,358 (4)
abstracting: (1<=belt1_light_barrier_true)
states: 73,228 (4)
abstracting: (A2U_rot2_rs<=A2L_rot2_in)
states: 2,396,011 (6)
abstracting: (1<=arm2_pick_up_angle)
states: 417,669 (5)
abstracting: (DB_trans_run<=DB_deliver_run)
states: 2,267,495 (6)
abstracting: (A1U_rotated<=1)
states: 2,409,739 (6)
-> the formula is TRUE
FORMULA ParamProductionCell-PT-4-ReachabilityCardinality-13 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.044sec
checking: AG [~ [[1<=A1L_in & [[[A1L_rot1_rs<=1 & ~ [1<=arm2_magnet_on]] & ~ [1<=A1L_in]] & [[[[arm2_retract_ext<=0 | CU_trans_run<=deposit_belt_empty] | ~ [swivel<=ch_CF_free]] & [1<=table_ready_for_unloading & ~ [A1L_rot1_rs<=A2U_rot1_run]]] | [[DB_out<=crane_transport_height & 1<=table_unload_angle] & A2U_rot2_in<=0]]]]]]
normalized: ~ [E [true U [1<=A1L_in & [[[A2U_rot2_in<=0 & [DB_out<=crane_transport_height & 1<=table_unload_angle]] | [[1<=table_ready_for_unloading & ~ [A1L_rot1_rs<=A2U_rot1_run]] & [~ [swivel<=ch_CF_free] | [arm2_retract_ext<=0 | CU_trans_run<=deposit_belt_empty]]]] & [~ [1<=A1L_in] & [A1L_rot1_rs<=1 & ~ [1<=arm2_magnet_on]]]]]]]
abstracting: (1<=arm2_magnet_on)
states: 1,129,042 (6)
abstracting: (A1L_rot1_rs<=1)
states: 2,409,739 (6)
abstracting: (1<=A1L_in)
states: 13,962 (4)
abstracting: (CU_trans_run<=deposit_belt_empty)
states: 2,292,325 (6)
abstracting: (arm2_retract_ext<=0)
states: 226,190 (5)
abstracting: (swivel<=ch_CF_free)
states: 1,868,389 (6)
abstracting: (A1L_rot1_rs<=A2U_rot1_run)
states: 2,403,665 (6)
abstracting: (1<=table_ready_for_unloading)
states: 393,316 (5)
abstracting: (1<=table_unload_angle)
states: 1,210,938 (6)
abstracting: (DB_out<=crane_transport_height)
states: 2,392,709 (6)
abstracting: (A2U_rot2_in<=0)
states: 2,396,011 (6)
abstracting: (1<=A1L_in)
states: 13,962 (4)
-> the formula is TRUE
FORMULA ParamProductionCell-PT-4-ReachabilityCardinality-04 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.098sec
checking: EF [~ [[[[~ [[[~ [[table_stop_v<=A1L_ext_run | 1<=PL_lower_rs]] & ~ [[FB_out<=0 & A2L_rot2_run<=0]]] & [CL_ready_to_transport<=1 & [[A2U_rot2_rs<=0 & A2L_ext_rs<=CU_trans_run] & [arm2_waiting_for_swivel_2<=A1L_rot3_in | A1U_ext_rs<=0]]]]] & 1<=A2L_rotated] | [~ [crane_transport_height<=0] | [A1U_extendet<=1 | ~ [A2U_rot3_rs<=TL_rot_run]]]] & CL_ready_to_grasp<=1]]]
normalized: E [true U ~ [[CL_ready_to_grasp<=1 & [[[A1U_extendet<=1 | ~ [A2U_rot3_rs<=TL_rot_run]] | ~ [crane_transport_height<=0]] | [1<=A2L_rotated & ~ [[[CL_ready_to_transport<=1 & [[arm2_waiting_for_swivel_2<=A1L_rot3_in | A1U_ext_rs<=0] & [A2U_rot2_rs<=0 & A2L_ext_rs<=CU_trans_run]]] & [~ [[FB_out<=0 & A2L_rot2_run<=0]] & ~ [[table_stop_v<=A1L_ext_run | 1<=PL_lower_rs]]]]]]]]]]
abstracting: (1<=PL_lower_rs)
states: 104,566 (5)
abstracting: (table_stop_v<=A1L_ext_run)
states: 574,926 (5)
abstracting: (A2L_rot2_run<=0)
states: 2,397,873 (6)
abstracting: (FB_out<=0)
states: 2,391,432 (6)
abstracting: (A2L_ext_rs<=CU_trans_run)
states: 2,398,913 (6)
abstracting: (A2U_rot2_rs<=0)
states: 2,396,011 (6)
abstracting: (A1U_ext_rs<=0)
states: 2,397,381 (6)
abstracting: (arm2_waiting_for_swivel_2<=A1L_rot3_in)
states: 2,301,704 (6)
abstracting: (CL_ready_to_transport<=1)
states: 2,409,739 (6)
abstracting: (1<=A2L_rotated)
states: 11,512 (4)
abstracting: (crane_transport_height<=0)
states: 696,555 (5)
abstracting: (A2U_rot3_rs<=TL_rot_run)
states: 2,396,686 (6)
abstracting: (A1U_extendet<=1)
states: 2,409,739 (6)
abstracting: (CL_ready_to_grasp<=1)
states: 2,409,739 (6)
-> the formula is FALSE
FORMULA ParamProductionCell-PT-4-ReachabilityCardinality-03 FALSE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.136sec
checking: EF [[[[1<=A2L_rotated & ~ [arm2_backward<=FB_trans_run]] & [~ [[[~ [[[1<=A2L_rotated | A1L_rot3_run<=1] | [A1U_ret_run<=1 & PU_in<=TL_lower_rs]]] & [1<=ch_FT_full & 1<=A1U_ext_run]] | [1<=table_bottom_pos & [[A1U_in<=A1L_out | ~ [arm1_stop<=A1U_rot3_in]] & [[A1_extended<=0 & A2L_rot2_in<=arm2_release_ext] | ~ [CU_in<=0]]]]]] | [A1L_ext_rs<=TL_lower_rs & A2L_rot1_rs<=1]]] & [A1U_rot3_in<=1 & 1<=press_ready_for_loading]]]
normalized: E [true U [[A1U_rot3_in<=1 & 1<=press_ready_for_loading] & [[~ [[[[1<=ch_FT_full & 1<=A1U_ext_run] & ~ [[[A1U_ret_run<=1 & PU_in<=TL_lower_rs] | [1<=A2L_rotated | A1L_rot3_run<=1]]]] | [1<=table_bottom_pos & [[~ [CU_in<=0] | [A1_extended<=0 & A2L_rot2_in<=arm2_release_ext]] & [A1U_in<=A1L_out | ~ [arm1_stop<=A1U_rot3_in]]]]]] | [A1L_ext_rs<=TL_lower_rs & A2L_rot1_rs<=1]] & [1<=A2L_rotated & ~ [arm2_backward<=FB_trans_run]]]]]
abstracting: (arm2_backward<=FB_trans_run)
states: 2,276,473 (6)
abstracting: (1<=A2L_rotated)
states: 11,512 (4)
abstracting: (A2L_rot1_rs<=1)
states: 2,409,739 (6)
abstracting: (A1L_ext_rs<=TL_lower_rs)
states: 2,400,025 (6)
abstracting: (arm1_stop<=A1U_rot3_in)
states: 138,011 (5)
abstracting: (A1U_in<=A1L_out)
states: 2,385,023 (6)
abstracting: (A2L_rot2_in<=arm2_release_ext)
states: 2,403,806 (6)
abstracting: (A1_extended<=0)
states: 2,400,025 (6)
abstracting: (CU_in<=0)
states: 2,345,668 (6)
abstracting: (1<=table_bottom_pos)
states: 1,173,801 (6)
abstracting: (A1L_rot3_run<=1)
states: 2,409,739 (6)
abstracting: (1<=A2L_rotated)
states: 11,512 (4)
abstracting: (PU_in<=TL_lower_rs)
states: 2,314,272 (6)
abstracting: (A1U_ret_run<=1)
states: 2,409,739 (6)
abstracting: (1<=A1U_ext_run)
states: 24,716 (4)
abstracting: (1<=ch_FT_full)
states: 89,458 (4)
abstracting: (1<=press_ready_for_loading)
states: 511,531 (5)
abstracting: (A1U_rot3_in<=1)
states: 2,409,739 (6)
-> the formula is FALSE
FORMULA ParamProductionCell-PT-4-ReachabilityCardinality-14 FALSE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.130sec
checking: EF [~ [[belt1_start<=press_ready_for_unloading | [[~ [[[[~ [A2U_rot3_run<=A1L_ret_rs] & [1<=table_ready_for_unloading | 1<=A2U_ext_run]] | [[A1U_ret_run<=CL_trans_run & arm2_pick_up_angle<=0] | ~ [A1U_ext_rs<=1]]] & [~ [[1<=crane_above_feed_belt & table_stop_h<=1]] | [[crane_above_deposit_belt<=0 & arm1_magnet_off<=crane_above_deposit_belt] | ~ [1<=A2U_rotated]]]]] & [[[[~ [DB_deliver_run<=forge_rs] | A2L_rot3_run<=0] & [~ [A1U_in<=1] | [1<=A2L_ext_rs | 1<=deposit_belt_occupied]]] | ~ [A2U_ret_rs<=0]] & [~ [ch_PA2_free<=0] | 1<=feed_belt_idle]]] | [~ [A2L_rot3_in<=1] & 1<=arm1_forward]]]]]
normalized: E [true U ~ [[belt1_start<=press_ready_for_unloading | [[1<=arm1_forward & ~ [A2L_rot3_in<=1]] | [[[1<=feed_belt_idle | ~ [ch_PA2_free<=0]] & [~ [A2U_ret_rs<=0] | [[[1<=A2L_ext_rs | 1<=deposit_belt_occupied] | ~ [A1U_in<=1]] & [A2L_rot3_run<=0 | ~ [DB_deliver_run<=forge_rs]]]]] & ~ [[[[~ [1<=A2U_rotated] | [crane_above_deposit_belt<=0 & arm1_magnet_off<=crane_above_deposit_belt]] | ~ [[1<=crane_above_feed_belt & table_stop_h<=1]]] & [[~ [A1U_ext_rs<=1] | [A1U_ret_run<=CL_trans_run & arm2_pick_up_angle<=0]] | [[1<=table_ready_for_unloading | 1<=A2U_ext_run] & ~ [A2U_rot3_run<=A1L_ret_rs]]]]]]]]]]
abstracting: (A2U_rot3_run<=A1L_ret_rs)
states: 2,382,041 (6)
abstracting: (1<=A2U_ext_run)
states: 67,452 (4)
abstracting: (1<=table_ready_for_unloading)
states: 393,316 (5)
abstracting: (arm2_pick_up_angle<=0)
states: 1,992,070 (6)
abstracting: (A1U_ret_run<=CL_trans_run)
states: 2,386,435 (6)
abstracting: (A1U_ext_rs<=1)
states: 2,409,739 (6)
abstracting: (table_stop_h<=1)
states: 2,409,739 (6)
abstracting: (1<=crane_above_feed_belt)
states: 1,154,409 (6)
abstracting: (arm1_magnet_off<=crane_above_deposit_belt)
states: 1,862,855 (6)
abstracting: (crane_above_deposit_belt<=0)
states: 1,154,409 (6)
abstracting: (1<=A2U_rotated)
states: 33,726 (4)
abstracting: (DB_deliver_run<=forge_rs)
states: 2,273,055 (6)
abstracting: (A2L_rot3_run<=0)
states: 2,386,715 (6)
abstracting: (A1U_in<=1)
states: 2,409,739 (6)
abstracting: (1<=deposit_belt_occupied)
states: 270,906 (5)
abstracting: (1<=A2L_ext_rs)
states: 11,512 (4)
abstracting: (A2U_ret_rs<=0)
states: 2,376,013 (6)
abstracting: (ch_PA2_free<=0)
states: 2,305,173 (6)
abstracting: (1<=feed_belt_idle)
states: 1,570,985 (6)
abstracting: (A2L_rot3_in<=1)
states: 2,409,739 (6)
abstracting: (1<=arm1_forward)
states: 66,216 (4)
abstracting: (belt1_start<=press_ready_for_unloading)
states: 2,321,011 (6)
-> the formula is TRUE
FORMULA ParamProductionCell-PT-4-ReachabilityCardinality-05 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 1.876sec
checking: EF [[[~ [[[~ [A1U_unloadet<=1] & [[~ [A2U_rot1_run<=0] | TU_lift_run<=arm1_backward] & ~ [[TL_lower_run<=A2U_rot1_rs | 1<=A1L_rotated]]]] | [[[~ [CU_lower_rs<=0] | ~ [A2L_ext_run<=1]] & ~ [[FB_at_end<=0 | 1<=ch_CF_full]]] | ~ [[[A1U_rotated<=1 & belt2_stop<=0] & [1<=A1L_rotated | CU_out<=crane_above_deposit_belt]]]]]] & [1<=crane_stop_v | [[CU_lower_run<=0 & [~ [1<=table_right] & 1<=DB_at_end]] | [belt1_stop<=1 & crane_stop_v<=arm1_release_ext]]]] & [1<=FB_deliver_run & [1<=A2U_unloaded | [[[~ [belt2_light_barrier_true<=1] & ~ [[belt1_stop<=A2L_extended & ch_DC_full<=A1U_unloadet]]] | A1U_rot3_rs<=crane_above_feed_belt] | [1<=arm1_store_free & [~ [[CL_trans_run<=1 & A1L_rot1_rs<=0]] & robot_left<=A2U_rot1_in]]]]]]]
normalized: E [true U [[1<=FB_deliver_run & [1<=A2U_unloaded | [[1<=arm1_store_free & [robot_left<=A2U_rot1_in & ~ [[CL_trans_run<=1 & A1L_rot1_rs<=0]]]] | [A1U_rot3_rs<=crane_above_feed_belt | [~ [[belt1_stop<=A2L_extended & ch_DC_full<=A1U_unloadet]] & ~ [belt2_light_barrier_true<=1]]]]]] & [[1<=crane_stop_v | [[belt1_stop<=1 & crane_stop_v<=arm1_release_ext] | [CU_lower_run<=0 & [1<=DB_at_end & ~ [1<=table_right]]]]] & ~ [[[~ [[[1<=A1L_rotated | CU_out<=crane_above_deposit_belt] & [A1U_rotated<=1 & belt2_stop<=0]]] | [~ [[FB_at_end<=0 | 1<=ch_CF_full]] & [~ [A2L_ext_run<=1] | ~ [CU_lower_rs<=0]]]] | [[~ [[TL_lower_run<=A2U_rot1_rs | 1<=A1L_rotated]] & [TU_lift_run<=arm1_backward | ~ [A2U_rot1_run<=0]]] & ~ [A1U_unloadet<=1]]]]]]]
abstracting: (A1U_unloadet<=1)
states: 2,409,739 (6)
abstracting: (A2U_rot1_run<=0)
states: 2,378,241 (6)
abstracting: (TU_lift_run<=arm1_backward)
states: 2,233,943 (6)
abstracting: (1<=A1L_rotated)
states: 9,714 (3)
abstracting: (TL_lower_run<=A2U_rot1_rs)
states: 2,220,147 (6)
abstracting: (CU_lower_rs<=0)
states: 2,345,668 (6)
abstracting: (A2L_ext_run<=1)
states: 2,409,739 (6)
abstracting: (1<=ch_CF_full)
states: 324,601 (5)
abstracting: (FB_at_end<=0)
states: 2,391,432 (6)
abstracting: (belt2_stop<=0)
states: 426,732 (5)
abstracting: (A1U_rotated<=1)
states: 2,409,739 (6)
abstracting: (CU_out<=crane_above_deposit_belt)
states: 2,409,739 (6)
abstracting: (1<=A1L_rotated)
states: 9,714 (3)
abstracting: (1<=table_right)
states: 555,498 (5)
abstracting: (1<=DB_at_end)
states: 71,122 (4)
abstracting: (CU_lower_run<=0)
states: 2,281,597 (6)
abstracting: (crane_stop_v<=arm1_release_ext)
states: 876,506 (5)
abstracting: (belt1_stop<=1)
states: 2,409,739 (6)
abstracting: (1<=crane_stop_v)
states: 1,573,873 (6)
abstracting: (belt2_light_barrier_true<=1)
states: 2,409,739 (6)
abstracting: (ch_DC_full<=A1U_unloadet)
states: 2,066,514 (6)
abstracting: (belt1_stop<=A2L_extended)
states: 120,838 (5)
abstracting: (A1U_rot3_rs<=crane_above_feed_belt)
states: 2,407,202 (6)
abstracting: (A1L_rot1_rs<=0)
states: 2,403,665 (6)
abstracting: (CL_trans_run<=1)
states: 2,409,739 (6)
abstracting: (robot_left<=A2U_rot1_in)
states: 2,240,860 (6)
abstracting: (1<=arm1_store_free)
states: 739,168 (5)
abstracting: (1<=A2U_unloaded)
states: 33,726 (4)
abstracting: (1<=FB_deliver_run)
states: 36,614 (4)
-> the formula is TRUE
FORMULA ParamProductionCell-PT-4-ReachabilityCardinality-15 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 3.058sec
checking: AG [~ [[~ [[~ [[~ [[CL_ready_to_transport<=0 | [arm1_having_swivel_2<=0 & A1U_rot1_in<=PU_in]]] & [~ [1<=A2U_out] | ~ [ch_PA2_full<=0]]]] | ~ [[press_up<=1 & [[[A2L_rot2_rs<=1 & A2L_rot3_in<=1] & 1<=CU_lower_rs] & ~ [[CU_lower_rs<=arm1_release_angle & 1<=DB_trans_rs]]]]]]] | [~ [[[arm1_store_free<=A2L_rot3_run | [~ [[1<=crane_pick_up_height | arm1_waiting_for_swivel_2<=0]] | ~ [[A2L_loaded<=0 | A2U_rot1_rs<=0]]]] & ~ [[~ [[A1L_ret_rs<=1 & A1U_rot3_run<=CU_ready_to_transport]] | [arm2_stop<=press_ready_for_loading | ~ [1<=table_ready_for_loading]]]]]] & [[~ [1<=robot_right] & A1L_rot3_rs<=A1L_rot1_rs] & [[[[[feed_belt_empty<=1 & A1U_out<=0] & 1<=FB_deliver_rs] | [1<=A2L_ret_rs | [1<=FB_deliver_rs | belt2_light_barrier_true<=1]]] | [~ [table_load_angle<=1] & [~ [CU_lift_run<=A2U_ext_rs] | arm2_stop<=1]]] & [~ [[arm2_pick_up_angle<=1 & A1L_ret_rs<=table_at_unload_angle]] & crane_mag_off<=0]]]]]]]
normalized: ~ [E [true U [[[[[crane_mag_off<=0 & ~ [[arm2_pick_up_angle<=1 & A1L_ret_rs<=table_at_unload_angle]]] & [[[arm2_stop<=1 | ~ [CU_lift_run<=A2U_ext_rs]] & ~ [table_load_angle<=1]] | [[1<=A2L_ret_rs | [1<=FB_deliver_rs | belt2_light_barrier_true<=1]] | [1<=FB_deliver_rs & [feed_belt_empty<=1 & A1U_out<=0]]]]] & [A1L_rot3_rs<=A1L_rot1_rs & ~ [1<=robot_right]]] & ~ [[~ [[[arm2_stop<=press_ready_for_loading | ~ [1<=table_ready_for_loading]] | ~ [[A1L_ret_rs<=1 & A1U_rot3_run<=CU_ready_to_transport]]]] & [arm1_store_free<=A2L_rot3_run | [~ [[A2L_loaded<=0 | A2U_rot1_rs<=0]] | ~ [[1<=crane_pick_up_height | arm1_waiting_for_swivel_2<=0]]]]]]] | ~ [[~ [[press_up<=1 & [~ [[CU_lower_rs<=arm1_release_angle & 1<=DB_trans_rs]] & [1<=CU_lower_rs & [A2L_rot2_rs<=1 & A2L_rot3_in<=1]]]]] | ~ [[[~ [ch_PA2_full<=0] | ~ [1<=A2U_out]] & ~ [[CL_ready_to_transport<=0 | [arm1_having_swivel_2<=0 & A1U_rot1_in<=PU_in]]]]]]]]]]
abstracting: (A1U_rot1_in<=PU_in)
states: 2,397,381 (6)
abstracting: (arm1_having_swivel_2<=0)
states: 2,268,222 (6)
abstracting: (CL_ready_to_transport<=0)
states: 2,334,499 (6)
abstracting: (1<=A2U_out)
states: 33,726 (4)
abstracting: (ch_PA2_full<=0)
states: 2,309,808 (6)
abstracting: (A2L_rot3_in<=1)
states: 2,409,739 (6)
abstracting: (A2L_rot2_rs<=1)
states: 2,409,739 (6)
abstracting: (1<=CU_lower_rs)
states: 64,071 (4)
abstracting: (1<=DB_trans_rs)
states: 71,122 (4)
abstracting: (CU_lower_rs<=arm1_release_angle)
states: 2,360,719 (6)
abstracting: (press_up<=1)
states: 2,409,739 (6)
abstracting: (arm1_waiting_for_swivel_2<=0)
states: 2,349,865 (6)
abstracting: (1<=crane_pick_up_height)
states: 376,200 (5)
abstracting: (A2U_rot1_rs<=0)
states: 2,393,990 (6)
abstracting: (A2L_loaded<=0)
states: 2,398,227 (6)
abstracting: (arm1_store_free<=A2L_rot3_run)
states: 1,681,729 (6)
abstracting: (A1U_rot3_run<=CU_ready_to_transport)
states: 2,398,911 (6)
abstracting: (A1L_ret_rs<=1)
states: 2,409,739 (6)
abstracting: (1<=table_ready_for_loading)
states: 349,929 (5)
abstracting: (arm2_stop<=press_ready_for_loading)
states: 754,075 (5)
abstracting: (1<=robot_right)
states: 146,205 (5)
abstracting: (A1L_rot3_rs<=A1L_rot1_rs)
states: 2,404,665 (6)
abstracting: (A1U_out<=0)
states: 2,397,381 (6)
abstracting: (feed_belt_empty<=1)
states: 2,409,739 (6)
abstracting: (1<=FB_deliver_rs)
states: 18,307 (4)
abstracting: (belt2_light_barrier_true<=1)
states: 2,409,739 (6)
abstracting: (1<=FB_deliver_rs)
states: 18,307 (4)
abstracting: (1<=A2L_ret_rs)
states: 11,512 (4)
abstracting: (table_load_angle<=1)
states: 2,409,739 (6)
abstracting: (CU_lift_run<=A2U_ext_rs)
states: 2,282,865 (6)
abstracting: (arm2_stop<=1)
states: 2,409,739 (6)
abstracting: (A1L_ret_rs<=table_at_unload_angle)
states: 2,400,025 (6)
abstracting: (arm2_pick_up_angle<=1)
states: 2,409,739 (6)
abstracting: (crane_mag_off<=0)
states: 1,221,423 (6)
-> the formula is FALSE
FORMULA ParamProductionCell-PT-4-ReachabilityCardinality-08 FALSE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 1.185sec
checking: EF [[CL_ready_to_grasp<=0 & [press_stop<=1 & [[~ [[[[A2U_ext_run<=1 | [TL_in<=0 & 1<=arm2_magnet_on]] & [TU_out<=A1L_rot3_in & [1<=ch_PA2_free | arm2_storing<=0]]] | [~ [[PU_out<=1 & PU_in<=0]] | A2U_rot3_rs<=press_at_lower_pos]]] | [~ [[[~ [arm2_waiting_for_swivel_1<=CU_trans_run] & ~ [1<=A2L_rot2_rs]] & [[CL_ready_to_transport<=ch_DC_full & 1<=A2U_rot1_run] & CL_loaded<=A2U_ext_rs]]] | [[[[table_unload_angle<=1 & 1<=A1U_ext_run] & press_stop<=1] | CL_out<=0] | [~ [DB_deliver_rs<=A2U_rotated] & [~ [1<=A1L_loaded] | [1<=A1U_rot1_run & 1<=ch_TA1_full]]]]]] & [~ [[TL_lower_rs<=1 & [CL_trans_run<=0 | [arm2_waiting_for_swivel_2<=0 | press_at_upper_pos<=A2U_ext_run]]]] & [[[ch_TA1_full<=1 | ~ [[FB_at_end<=0 & 1<=deposit_belt_occupied]]] & ~ [[table_right<=CU_out | 1<=crane_transport_height]]] | belt2_start<=table_top_pos]]]]]]
normalized: E [true U [CL_ready_to_grasp<=0 & [press_stop<=1 & [[[belt2_start<=table_top_pos | [~ [[table_right<=CU_out | 1<=crane_transport_height]] & [ch_TA1_full<=1 | ~ [[FB_at_end<=0 & 1<=deposit_belt_occupied]]]]] & ~ [[TL_lower_rs<=1 & [CL_trans_run<=0 | [arm2_waiting_for_swivel_2<=0 | press_at_upper_pos<=A2U_ext_run]]]]] & [[[[[[1<=A1U_rot1_run & 1<=ch_TA1_full] | ~ [1<=A1L_loaded]] & ~ [DB_deliver_rs<=A2U_rotated]] | [CL_out<=0 | [press_stop<=1 & [table_unload_angle<=1 & 1<=A1U_ext_run]]]] | ~ [[[CL_loaded<=A2U_ext_rs & [CL_ready_to_transport<=ch_DC_full & 1<=A2U_rot1_run]] & [~ [1<=A2L_rot2_rs] & ~ [arm2_waiting_for_swivel_1<=CU_trans_run]]]]] | ~ [[[A2U_rot3_rs<=press_at_lower_pos | ~ [[PU_out<=1 & PU_in<=0]]] | [[TU_out<=A1L_rot3_in & [1<=ch_PA2_free | arm2_storing<=0]] & [A2U_ext_run<=1 | [TL_in<=0 & 1<=arm2_magnet_on]]]]]]]]]]
abstracting: (1<=arm2_magnet_on)
states: 1,129,042 (6)
abstracting: (TL_in<=0)
states: 2,314,031 (6)
abstracting: (A2U_ext_run<=1)
states: 2,409,739 (6)
abstracting: (arm2_storing<=0)
states: 1,917,715 (6)
abstracting: (1<=ch_PA2_free)
states: 104,566 (5)
abstracting: (TU_out<=A1L_rot3_in)
states: 2,320,281 (6)
abstracting: (PU_in<=0)
states: 2,309,808 (6)
abstracting: (PU_out<=1)
states: 2,409,739 (6)
abstracting: (A2U_rot3_rs<=press_at_lower_pos)
states: 2,401,311 (6)
abstracting: (arm2_waiting_for_swivel_1<=CU_trans_run)
states: 2,371,029 (6)
abstracting: (1<=A2L_rot2_rs)
states: 5,933 (3)
abstracting: (1<=A2U_rot1_run)
states: 31,498 (4)
abstracting: (CL_ready_to_transport<=ch_DC_full)
states: 2,334,499 (6)
abstracting: (CL_loaded<=A2U_ext_rs)
states: 2,335,938 (6)
abstracting: (1<=A1U_ext_run)
states: 24,716 (4)
abstracting: (table_unload_angle<=1)
states: 2,409,739 (6)
abstracting: (press_stop<=1)
states: 2,409,739 (6)
abstracting: (CL_out<=0)
states: 2,334,499 (6)
abstracting: (DB_deliver_rs<=A2U_rotated)
states: 2,338,617 (6)
abstracting: (1<=A1L_loaded)
states: 9,714 (3)
abstracting: (1<=ch_TA1_full)
states: 89,458 (4)
abstracting: (1<=A1U_rot1_run)
states: 24,716 (4)
abstracting: (press_at_upper_pos<=A2U_ext_run)
states: 2,024,471 (6)
abstracting: (arm2_waiting_for_swivel_2<=0)
states: 2,301,704 (6)
abstracting: (CL_trans_run<=0)
states: 2,259,259 (6)
abstracting: (TL_lower_rs<=1)
states: 2,409,739 (6)
abstracting: (1<=deposit_belt_occupied)
states: 270,906 (5)
abstracting: (FB_at_end<=0)
states: 2,391,432 (6)
abstracting: (ch_TA1_full<=1)
states: 2,409,739 (6)
abstracting: (1<=crane_transport_height)
states: 1,713,184 (6)
abstracting: (table_right<=CU_out)
states: 1,869,934 (6)
abstracting: (belt2_start<=table_top_pos)
states: 2,214,451 (6)
abstracting: (press_stop<=1)
states: 2,409,739 (6)
abstracting: (CL_ready_to_grasp<=0)
states: 2,334,499 (6)
-> the formula is TRUE
FORMULA ParamProductionCell-PT-4-ReachabilityCardinality-09 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 1.261sec
checking: EF [[[~ [[[[~ [[[1<=press_down | 1<=CU_lift_run] | [belt1_light_barrier_true<=0 & crane_store_free<=A1U_rotated]]] & [[[A2L_rotated<=0 & table_right<=1] & [press_at_upper_pos<=A2U_in | 1<=crane_to_belt1]] & [~ [1<=CU_lift_run] | DB_in<=ch_FT_free]]] & [[~ [1<=A1L_rot3_rs] | [[1<=arm2_store_free & crane_to_belt2<=0] & [1<=forge_run & 1<=CL_in]]] | ch_A1P_free<=1]] & A2L_rot2_in<=arm2_having_swivel_2]] & ~ [1<=crane_above_deposit_belt]] & [[1<=crane_mag_on & [[[~ [[[1<=A1U_rot3_in | A2U_ret_run<=A1U_rot2_run] | CU_ready_to_transport<=0]] & [table_at_load_angle<=0 | ~ [A1L_ext_run<=1]]] & ~ [[swivel<=crane_storing | [A1L_ext_rs<=A2U_ret_run | [A1L_loaded<=TL_rot_rs & TL_lower_rs<=1]]]]] & ~ [[[[[A1U_ret_rs<=1 & 1<=A1L_loaded] | [PL_lower_rs<=1 | 1<=A1_extended]] & DB_trans_run<=crane_transport_height] & [~ [[1<=crane_transport_height | arm2_stop<=0]] | CU_lower_run<=0]]]]] & [[1<=feed_belt_occupied & ~ [[1<=belt1_stop | [[~ [table_at_unload_angle<=A2U_rot2_run] & table_unload_angle<=ch_CF_free] | ~ [press_upward<=deposit_belt_idle]]]]] | ~ [[1<=TL_rot_run & ~ [[~ [crane_transport_height<=0] & [[arm1_having_swivel_2<=1 | CU_trans_run<=arm2_pick_up_angle] & [ch_DC_free<=1 & 1<=ch_FT_free]]]]]]]]]]
normalized: E [true U [[[~ [[1<=TL_rot_run & ~ [[[[ch_DC_free<=1 & 1<=ch_FT_free] & [arm1_having_swivel_2<=1 | CU_trans_run<=arm2_pick_up_angle]] & ~ [crane_transport_height<=0]]]]] | [1<=feed_belt_occupied & ~ [[1<=belt1_stop | [~ [press_upward<=deposit_belt_idle] | [table_unload_angle<=ch_CF_free & ~ [table_at_unload_angle<=A2U_rot2_run]]]]]]] & [1<=crane_mag_on & [~ [[[CU_lower_run<=0 | ~ [[1<=crane_transport_height | arm2_stop<=0]]] & [DB_trans_run<=crane_transport_height & [[PL_lower_rs<=1 | 1<=A1_extended] | [A1U_ret_rs<=1 & 1<=A1L_loaded]]]]] & [~ [[swivel<=crane_storing | [A1L_ext_rs<=A2U_ret_run | [A1L_loaded<=TL_rot_rs & TL_lower_rs<=1]]]] & [[table_at_load_angle<=0 | ~ [A1L_ext_run<=1]] & ~ [[CU_ready_to_transport<=0 | [1<=A1U_rot3_in | A2U_ret_run<=A1U_rot2_run]]]]]]]] & [~ [1<=crane_above_deposit_belt] & ~ [[A2L_rot2_in<=arm2_having_swivel_2 & [[ch_A1P_free<=1 | [[[1<=forge_run & 1<=CL_in] & [1<=arm2_store_free & crane_to_belt2<=0]] | ~ [1<=A1L_rot3_rs]]] & [[[DB_in<=ch_FT_free | ~ [1<=CU_lift_run]] & [[press_at_upper_pos<=A2U_in | 1<=crane_to_belt1] & [A2L_rotated<=0 & table_right<=1]]] & ~ [[[belt1_light_barrier_true<=0 & crane_store_free<=A1U_rotated] | [1<=press_down | 1<=CU_lift_run]]]]]]]]]]
abstracting: (1<=CU_lift_run)
states: 128,142 (5)
abstracting: (1<=press_down)
states: 299,793 (5)
abstracting: (crane_store_free<=A1U_rotated)
states: 2,175,506 (6)
abstracting: (belt1_light_barrier_true<=0)
states: 2,336,511 (6)
abstracting: (table_right<=1)
states: 2,409,739 (6)
abstracting: (A2L_rotated<=0)
states: 2,398,227 (6)
abstracting: (1<=crane_to_belt1)
states: 225,720 (5)
abstracting: (press_at_upper_pos<=A2U_in)
states: 2,017,243 (6)
abstracting: (1<=CU_lift_run)
states: 128,142 (5)
abstracting: (DB_in<=ch_FT_free)
states: 2,341,445 (6)
abstracting: (1<=A1L_rot3_rs)
states: 5,074 (3)
abstracting: (crane_to_belt2<=0)
states: 2,217,526 (6)
abstracting: (1<=arm2_store_free)
states: 716,515 (5)
abstracting: (1<=CL_in)
states: 75,240 (4)
abstracting: (1<=forge_run)
states: 199,862 (5)
abstracting: (ch_A1P_free<=1)
states: 2,409,739 (6)
abstracting: (A2L_rot2_in<=arm2_having_swivel_2)
states: 2,403,806 (6)
abstracting: (1<=crane_above_deposit_belt)
states: 1,255,330 (6)
abstracting: (A2U_ret_run<=A1U_rot2_run)
states: 2,342,287 (6)
abstracting: (1<=A1U_rot3_in)
states: 5,579 (3)
abstracting: (CU_ready_to_transport<=0)
states: 2,345,668 (6)
abstracting: (A1L_ext_run<=1)
states: 2,409,739 (6)
abstracting: (table_at_load_angle<=0)
states: 2,314,031 (6)
abstracting: (TL_lower_rs<=1)
states: 2,409,739 (6)
abstracting: (A1L_loaded<=TL_rot_rs)
states: 2,400,025 (6)
abstracting: (A1L_ext_rs<=A2U_ret_run)
states: 2,400,025 (6)
abstracting: (swivel<=crane_storing)
states: 1,845,858 (6)
abstracting: (1<=A1L_loaded)
states: 9,714 (3)
abstracting: (A1U_ret_rs<=1)
states: 2,409,739 (6)
abstracting: (1<=A1_extended)
states: 9,714 (3)
abstracting: (PL_lower_rs<=1)
states: 2,409,739 (6)
abstracting: (DB_trans_run<=crane_transport_height)
states: 2,375,679 (6)
abstracting: (arm2_stop<=0)
states: 271,428 (5)
abstracting: (1<=crane_transport_height)
states: 1,713,184 (6)
abstracting: (CU_lower_run<=0)
states: 2,281,597 (6)
abstracting: (1<=crane_mag_on)
states: 1,221,423 (6)
abstracting: (table_at_unload_angle<=A2U_rot2_run)
states: 2,321,337 (6)
abstracting: (table_unload_angle<=ch_CF_free)
states: 1,408,374 (6)
abstracting: (press_upward<=deposit_belt_idle)
states: 2,269,399 (6)
abstracting: (1<=belt1_stop)
states: 2,299,897 (6)
abstracting: (1<=feed_belt_occupied)
states: 324,601 (5)
abstracting: (crane_transport_height<=0)
states: 696,555 (5)
abstracting: (CU_trans_run<=arm2_pick_up_angle)
states: 2,305,255 (6)
abstracting: (arm1_having_swivel_2<=1)
states: 2,409,739 (6)
abstracting: (1<=ch_FT_free)
states: 95,708 (4)
abstracting: (ch_DC_free<=1)
states: 2,409,739 (6)
abstracting: (1<=TL_rot_run)
states: 191,416 (5)
-> the formula is FALSE
FORMULA ParamProductionCell-PT-4-ReachabilityCardinality-00 FALSE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.589sec
totally nodes used: 3536220 (3.5e+06)
number of garbage collections: 0
fire ops cache: hits/miss/sum: 2104211 16116700 18220911
used/not used/entry size/cache size: 16348247 50760617 16 1024MB
basic ops cache: hits/miss/sum: 551393 4695167 5246560
used/not used/entry size/cache size: 6576923 10200293 12 192MB
unary ops cache: hits/miss/sum: 0 0 0
used/not used/entry size/cache size: 0 16777216 8 128MB
abstract ops cache: hits/miss/sum: 0 0 0
used/not used/entry size/cache size: 0 16777216 12 192MB
state nr cache: hits/miss/sum: 49795 539344 589139
used/not used/entry size/cache size: 523520 7865088 32 256MB
max state cache: hits/miss/sum: 0 0 0
used/not used/entry size/cache size: 0 8388608 32 256MB
uniqueHash elements/entry size/size: 67108864 4 256MB
0 64258846
1 2298323
2 438739
3 94262
4 16169
5 2222
6 274
7 29
8 0
9 0
>= 10 0
Total processing time: 0m19.584sec
BK_STOP 1678841677011
--------------------
content from stderr:
check for maximal unmarked siphon
ok
check for constant places
ok
check if there are places and transitions
ok
check if there are transitions without pre-places
ok
check if at least one transition is enabled in m0
ok
check if there are transitions that can never fire
ok
initing FirstDep: 0m 0.001sec
iterations count:13103 (64), effective:883 (4)
initing FirstDep: 0m 0.001sec
iterations count:4601 (22), effective:260 (1)
iterations count:6009 (29), effective:351 (1)
iterations count:5737 (28), effective:353 (1)
iterations count:8799 (43), effective:514 (2)
iterations count:5726 (28), effective:352 (1)
iterations count:6050 (29), effective:401 (1)
iterations count:7476 (37), effective:422 (2)
iterations count:9932 (49), effective:591 (2)
iterations count:6724 (33), effective:427 (2)
iterations count:9574 (47), effective:564 (2)
Sequence of Actions to be Executed by the VM
This is useful if one wants to reexecute the tool in the VM from the submitted image disk.
set -x
# this is for BenchKit: configuration of major elements for the test
export BK_INPUT="ParamProductionCell-PT-4"
export BK_EXAMINATION="ReachabilityCardinality"
export BK_TOOL="marcie"
export BK_RESULT_DIR="/tmp/BK_RESULTS/OUTPUTS"
export BK_TIME_CONFINEMENT="3600"
export BK_MEMORY_CONFINEMENT="16384"
export BK_BIN_PATH="/home/mcc/BenchKit/bin/"
# this is specific to your benchmark or test
export BIN_DIR="$HOME/BenchKit/bin"
# remove the execution directoty if it exists (to avoid increse of .vmdk images)
if [ -d execution ] ; then
rm -rf execution
fi
# this is for BenchKit: explicit launching of the test
echo "====================================================================="
echo " Generated by BenchKit 2-5348"
echo " Executing tool marcie"
echo " Input is ParamProductionCell-PT-4, examination is ReachabilityCardinality"
echo " Time confinement is $BK_TIME_CONFINEMENT seconds"
echo " Memory confinement is 16384 MBytes"
echo " Number of cores is 1"
echo " Run identifier is r257-smll-167863532700398"
echo "====================================================================="
echo
echo "--------------------"
echo "preparation of the directory to be used:"
tar xzf /home/mcc/BenchKit/INPUTS/ParamProductionCell-PT-4.tgz
mv ParamProductionCell-PT-4 execution
cd execution
if [ "ReachabilityCardinality" = "ReachabilityDeadlock" ] || [ "ReachabilityCardinality" = "UpperBounds" ] || [ "ReachabilityCardinality" = "QuasiLiveness" ] || [ "ReachabilityCardinality" = "StableMarking" ] || [ "ReachabilityCardinality" = "Liveness" ] || [ "ReachabilityCardinality" = "OneSafe" ] || [ "ReachabilityCardinality" = "StateSpace" ]; then
rm -f GenericPropertiesVerdict.xml
fi
pwd
ls -lh
echo
echo "--------------------"
echo "content from stdout:"
echo
echo "=== Data for post analysis generated by BenchKit (invocation template)"
echo
if [ "ReachabilityCardinality" = "UpperBounds" ] ; then
echo "The expected result is a vector of positive values"
echo NUM_VECTOR
elif [ "ReachabilityCardinality" != "StateSpace" ] ; then
echo "The expected result is a vector of booleans"
echo BOOL_VECTOR
else
echo "no data necessary for post analysis"
fi
echo
if [ -f "ReachabilityCardinality.txt" ] ; then
echo "here is the order used to build the result vector(from text file)"
for x in $(grep Property ReachabilityCardinality.txt | cut -d ' ' -f 2 | sort -u) ; do
echo "FORMULA_NAME $x"
done
elif [ -f "ReachabilityCardinality.xml" ] ; then # for cunf (txt files deleted;-)
echo echo "here is the order used to build the result vector(from xml file)"
for x in $(grep '
echo "FORMULA_NAME $x"
done
elif [ "ReachabilityCardinality" = "ReachabilityDeadlock" ] || [ "ReachabilityCardinality" = "QuasiLiveness" ] || [ "ReachabilityCardinality" = "StableMarking" ] || [ "ReachabilityCardinality" = "Liveness" ] || [ "ReachabilityCardinality" = "OneSafe" ] ; then
echo "FORMULA_NAME ReachabilityCardinality"
fi
echo
echo "=== Now, execution of the tool begins"
echo
echo -n "BK_START "
date -u +%s%3N
echo
timeout -s 9 $BK_TIME_CONFINEMENT bash -c "/home/mcc/BenchKit/BenchKit_head.sh 2> STDERR ; echo ; echo -n \"BK_STOP \" ; date -u +%s%3N"
if [ $? -eq 137 ] ; then
echo
echo "BK_TIME_CONFINEMENT_REACHED"
fi
echo
echo "--------------------"
echo "content from stderr:"
echo
cat STDERR ;