
About the Execution of ITS-Tools for RobotManipulation-PT-00020
| Execution Summary | |||||
| Max Memory Used (MB) |
Time wait (ms) | CPU Usage (ms) | I/O Wait (ms) | Computed Result | Execution Status |
| 4670.863 | 3366598.00 | 3390669.00 | 9660.80 | TTTFFTFTFTTTFFFT | normal |
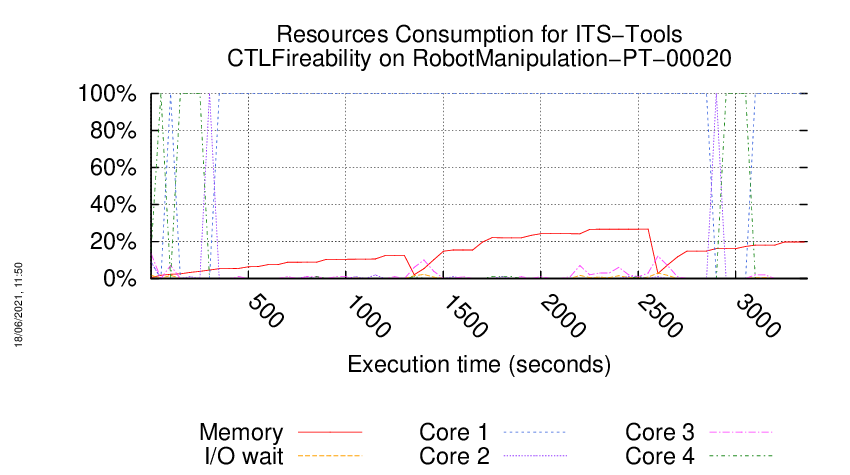
Execution Chart
We display below the execution chart for this examination (boot time has been removed).
Trace from the execution
Formatting '/data/fkordon/mcc2021-input.r197-smll-162089451800042.qcow2', fmt=qcow2 size=4294967296 backing_file=/data/fkordon/mcc2021-input.qcow2 cluster_size=65536 lazy_refcounts=off refcount_bits=16
Waiting for the VM to be ready (probing ssh)
............................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
=====================================================================
Generated by BenchKit 2-4028
Executing tool itstools
Input is RobotManipulation-PT-00020, examination is CTLFireability
Time confinement is 3600 seconds
Memory confinement is 16384 MBytes
Number of cores is 4
Run identifier is r197-smll-162089451800042
=====================================================================
--------------------
preparation of the directory to be used:
/home/mcc/execution
total 396K
-rw-r--r-- 1 mcc users 16K May 5 16:58 CTLCardinality.txt
-rw-r--r-- 1 mcc users 133K May 10 09:44 CTLCardinality.xml
-rw-r--r-- 1 mcc users 9.8K May 5 16:58 CTLFireability.txt
-rw-r--r-- 1 mcc users 71K May 10 09:44 CTLFireability.xml
-rw-r--r-- 1 mcc users 4.2K May 6 14:48 GenericPropertiesDefinition.xml
-rw-r--r-- 1 mcc users 6.6K May 6 14:48 GenericPropertiesVerdict.xml
-rw-r--r-- 1 mcc users 3.8K Mar 28 16:33 LTLCardinality.txt
-rw-r--r-- 1 mcc users 26K Mar 28 16:33 LTLCardinality.xml
-rw-r--r-- 1 mcc users 2.4K Mar 28 16:33 LTLFireability.txt
-rw-r--r-- 1 mcc users 19K Mar 28 16:33 LTLFireability.xml
-rw-r--r-- 1 mcc users 4.3K Mar 27 10:57 ReachabilityCardinality.txt
-rw-r--r-- 1 mcc users 21K Mar 27 10:57 ReachabilityCardinality.xml
-rw-r--r-- 1 mcc users 3.5K Mar 25 14:06 ReachabilityFireability.txt
-rw-r--r-- 1 mcc users 21K Mar 25 14:06 ReachabilityFireability.xml
-rw-r--r-- 1 mcc users 1.8K Mar 22 08:15 UpperBounds.txt
-rw-r--r-- 1 mcc users 3.8K Mar 22 08:15 UpperBounds.xml
-rw-r--r-- 1 mcc users 6 May 5 16:51 equiv_col
-rw-r--r-- 1 mcc users 6 May 5 16:51 instance
-rw-r--r-- 1 mcc users 6 May 5 16:51 iscolored
-rw-r--r-- 1 mcc users 6.4K May 5 16:51 model.pnml
--------------------
content from stdout:
=== Data for post analysis generated by BenchKit (invocation template)
The expected result is a vector of booleans
BOOL_VECTOR
here is the order used to build the result vector(from text file)
FORMULA_NAME RobotManipulation-PT-00020-CTLFireability-00
FORMULA_NAME RobotManipulation-PT-00020-CTLFireability-01
FORMULA_NAME RobotManipulation-PT-00020-CTLFireability-02
FORMULA_NAME RobotManipulation-PT-00020-CTLFireability-03
FORMULA_NAME RobotManipulation-PT-00020-CTLFireability-04
FORMULA_NAME RobotManipulation-PT-00020-CTLFireability-05
FORMULA_NAME RobotManipulation-PT-00020-CTLFireability-06
FORMULA_NAME RobotManipulation-PT-00020-CTLFireability-07
FORMULA_NAME RobotManipulation-PT-00020-CTLFireability-08
FORMULA_NAME RobotManipulation-PT-00020-CTLFireability-09
FORMULA_NAME RobotManipulation-PT-00020-CTLFireability-10
FORMULA_NAME RobotManipulation-PT-00020-CTLFireability-11
FORMULA_NAME RobotManipulation-PT-00020-CTLFireability-12
FORMULA_NAME RobotManipulation-PT-00020-CTLFireability-13
FORMULA_NAME RobotManipulation-PT-00020-CTLFireability-14
FORMULA_NAME RobotManipulation-PT-00020-CTLFireability-15
=== Now, execution of the tool begins
BK_START 1620950993190
Running Version 0
[2021-05-14 00:09:56] [INFO ] Running its-tools with arguments : [-pnfolder, /home/mcc/execution, -examination, CTLFireability, -spotpath, /home/mcc/BenchKit/bin//..//ltlfilt, -z3path, /home/mcc/BenchKit/bin//..//z3/bin/z3, -yices2path, /home/mcc/BenchKit/bin//..//yices/bin/yices, -its, -ltsmin, -greatspnpath, /home/mcc/BenchKit/bin//..//greatspn/, -order, META, -manyOrder, -smt, -timeout, 3600]
[2021-05-14 00:09:56] [INFO ] Parsing pnml file : /home/mcc/execution/model.pnml
[2021-05-14 00:09:56] [INFO ] Load time of PNML (sax parser for PT used): 42 ms
[2021-05-14 00:09:56] [INFO ] Transformed 15 places.
[2021-05-14 00:09:56] [INFO ] Transformed 11 transitions.
[2021-05-14 00:09:56] [INFO ] Parsed PT model containing 15 places and 11 transitions in 122 ms.
Parsed 16 properties from file /home/mcc/execution/CTLFireability.xml in 34 ms.
Support contains 15 out of 15 places. Attempting structural reductions.
Starting structural reductions, iteration 0 : 15/15 places, 11/11 transitions.
Applied a total of 0 rules in 31 ms. Remains 15 /15 variables (removed 0) and now considering 11/11 (removed 0) transitions.
// Phase 1: matrix 11 rows 15 cols
[2021-05-14 00:09:56] [INFO ] Computed 6 place invariants in 10 ms
[2021-05-14 00:09:56] [INFO ] Implicit Places using invariants in 202 ms returned []
// Phase 1: matrix 11 rows 15 cols
[2021-05-14 00:09:56] [INFO ] Computed 6 place invariants in 2 ms
[2021-05-14 00:09:56] [INFO ] Implicit Places using invariants and state equation in 69 ms returned []
Implicit Place search using SMT with State Equation took 328 ms to find 0 implicit places.
// Phase 1: matrix 11 rows 15 cols
[2021-05-14 00:09:56] [INFO ] Computed 6 place invariants in 2 ms
[2021-05-14 00:09:56] [INFO ] Dead Transitions using invariants and state equation in 52 ms returned []
Finished structural reductions, in 1 iterations. Remains : 15/15 places, 11/11 transitions.
[2021-05-14 00:09:57] [INFO ] Flatten gal took : 52 ms
[2021-05-14 00:09:57] [INFO ] Flatten gal took : 11 ms
[2021-05-14 00:09:57] [INFO ] Input system was already deterministic with 11 transitions.
Incomplete random walk after 100017 steps, including 2 resets, run finished after 114 ms. (steps per millisecond=877 ) properties (out of 70) seen :67
Running SMT prover for 3 properties.
// Phase 1: matrix 11 rows 15 cols
[2021-05-14 00:09:57] [INFO ] Computed 6 place invariants in 2 ms
[2021-05-14 00:09:57] [INFO ] [Real]Absence check using 3 positive place invariants in 3 ms returned sat
[2021-05-14 00:09:57] [INFO ] [Real]Absence check using 3 positive and 3 generalized place invariants in 2 ms returned unsat
[2021-05-14 00:09:57] [INFO ] [Real]Absence check using 3 positive place invariants in 3 ms returned sat
[2021-05-14 00:09:57] [INFO ] [Real]Absence check using 3 positive and 3 generalized place invariants in 11 ms returned unsat
[2021-05-14 00:09:57] [INFO ] [Real]Absence check using 3 positive place invariants in 4 ms returned sat
[2021-05-14 00:09:57] [INFO ] [Real]Absence check using 3 positive and 3 generalized place invariants in 4 ms returned unsat
Successfully simplified 3 atomic propositions for a total of 16 simplifications.
[2021-05-14 00:09:57] [INFO ] Initial state test concluded for 1 properties.
FORMULA RobotManipulation-PT-00020-CTLFireability-04 FALSE TECHNIQUES TOPOLOGICAL INITIAL_STATE
Discarding 2 places :
Implicit places reduction removed 2 places
Drop transitions removed 1 transitions
Trivial Post-agglo rules discarded 1 transitions
Performed 1 trivial Post agglomeration. Transition count delta: 1
Iterating post reduction 0 with 3 rules applied. Total rules applied 3 place count 13 transition count 10
Reduce places removed 1 places and 0 transitions.
Iterating post reduction 1 with 1 rules applied. Total rules applied 4 place count 12 transition count 10
Performed 1 Pre agglomeration using Quasi-Persistent + Divergent Free condition..
Pre-agglomeration after 2 with 1 Pre rules applied. Total rules applied 4 place count 12 transition count 9
Deduced a syphon composed of 1 places in 0 ms
Reduce places removed 1 places and 0 transitions.
Iterating global reduction 2 with 2 rules applied. Total rules applied 6 place count 11 transition count 9
Performed 2 Post agglomeration using F-continuation condition.Transition count delta: 2
Deduced a syphon composed of 2 places in 0 ms
Reduce places removed 2 places and 0 transitions.
Iterating global reduction 2 with 4 rules applied. Total rules applied 10 place count 9 transition count 7
Applied a total of 10 rules in 21 ms. Remains 9 /15 variables (removed 6) and now considering 7/11 (removed 4) transitions.
[2021-05-14 00:09:57] [INFO ] Flatten gal took : 3 ms
[2021-05-14 00:09:57] [INFO ] Flatten gal took : 3 ms
[2021-05-14 00:09:57] [INFO ] Input system was already deterministic with 7 transitions.
[2021-05-14 00:09:57] [INFO ] Flatten gal took : 3 ms
[2021-05-14 00:09:57] [INFO ] Flatten gal took : 3 ms
[2021-05-14 00:09:57] [INFO ] Time to serialize gal into /tmp/CTLFireability1404140900022191098.gal : 2 ms
[2021-05-14 00:09:57] [INFO ] Time to serialize properties into /tmp/CTLFireability4996686820832860612.ctl : 1 ms
Invoking ITS tools like this :CommandLine [args=[/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.202104292328/bin/its-ctl-linux64, --gc-threshold, 2000000, --quiet, -i, /tmp/CTLFireability1404140900022191098.gal, -t, CGAL, -ctl, /tmp/CTLFireability4996686820832860612.ctl, --gen-order, FOLLOW], workingDir=/home/mcc/execution]
its-ctl command run as :
/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.202104292328/bin/its-ctl-linux64 --gc-threshold 2000000 --quiet -i /tmp/CTLFireability1404140900022191098.gal -t CGAL -ctl /tmp/CTLFireability4996686820832860612.ctl --gen-order FOLLOW
No direction supplied, using forward translation only.
Parsed 1 CTL formulae.
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
reachable,1.22176e+06,0.67477,17664,2,16730,5,71574,6,0,46,67560,0
Converting to forward existential form...Done !
original formula: AG(AF((((move>=1)&&(r_active>=1))||((off>=1)&&(r_active>=1)))))
=> equivalent forward existential formula: [FwdG(FwdU(Init,TRUE),!((((move>=1)&&(r_active>=1))||((off>=1)&&(r_active>=1)))))] = FALSE
Hit Full ! (commute/partial/dont) 1/1/6
(forward)formula 0,1,4.22563,72868,1,0,6,350641,20,0,581,345852,8
FORMULA RobotManipulation-PT-00020-CTLFireability-10 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
Applied a total of 0 rules in 2 ms. Remains 15 /15 variables (removed 0) and now considering 11/11 (removed 0) transitions.
[2021-05-14 00:10:02] [INFO ] Flatten gal took : 2 ms
[2021-05-14 00:10:02] [INFO ] Flatten gal took : 2 ms
[2021-05-14 00:10:02] [INFO ] Input system was already deterministic with 11 transitions.
[2021-05-14 00:10:02] [INFO ] Flatten gal took : 2 ms
[2021-05-14 00:10:02] [INFO ] Flatten gal took : 2 ms
[2021-05-14 00:10:02] [INFO ] Time to serialize gal into /tmp/CTLFireability11832833759731588502.gal : 1 ms
[2021-05-14 00:10:02] [INFO ] Time to serialize properties into /tmp/CTLFireability17556300104327348059.ctl : 0 ms
Invoking ITS tools like this :CommandLine [args=[/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.202104292328/bin/its-ctl-linux64, --gc-threshold, 2000000, --quiet, -i, /tmp/CTLFireability11832833759731588502.gal, -t, CGAL, -ctl, /tmp/CTLFireability17556300104327348059.ctl, --gen-order, FOLLOW], workingDir=/home/mcc/execution]
its-ctl command run as :
/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.202104292328/bin/its-ctl-linux64 --gc-threshold 2000000 --quiet -i /tmp/CTLFireability11832833759731588502.gal -t CGAL -ctl /tmp/CTLFireability17556300104327348059.ctl --gen-order FOLLOW
No direction supplied, using forward translation only.
Parsed 1 CTL formulae.
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
reachable,4.10891e+09,15.7067,230840,2,21938,5,1.41887e+06,6,0,74,1.47079e+06,0
Converting to forward existential form...Done !
original formula: AG(EF(((((p_rdy<1) * (!(AF(((((((((((initialize>=1)&&(r_stopped>=1))||((move>=1)&&(r_active>=1)))||(r_moving>=1))||(p_rdy>=1))||((off>=1)&&(r_active>=1)))||(p_sc>=1))||((moved>=1)&&(p_m>=1)))||((p_rdy>=1)&&(access>=1)))||(p_rel>=1)))) + ((((((((r_moving>=1)||(p_rdy>=1))||(p_sc>=1))||(p_i1>=1))||((move>=1)&&(r_active>=1)))||((off>=1)&&(r_active>=1)))||((moved>=1)&&(p_m>=1)))&&((((((p_sc<1)&&(p_rel<1))&&(p_i1<1))&&((move<1)||(r_active<1)))&&((off<1)||(r_active<1)))||((((p_sc<1)&&(p_rel<1))&&((move<1)||(r_active<1)))&&((initialized<1)||(p_i2<1))))))) * ((initialize<1)||(r_stopped<1))) * ((off<1)||(r_active<1)))))
=> equivalent forward existential formula: [(FwdU(Init,TRUE) * !(E(TRUE U ((((p_rdy<1) * (!(!(EG(!(((((((((((initialize>=1)&&(r_stopped>=1))||((move>=1)&&(r_active>=1)))||(r_moving>=1))||(p_rdy>=1))||((off>=1)&&(r_active>=1)))||(p_sc>=1))||((moved>=1)&&(p_m>=1)))||((p_rdy>=1)&&(access>=1)))||(p_rel>=1)))))) + ((((((((r_moving>=1)||(p_rdy>=1))||(p_sc>=1))||(p_i1>=1))||((move>=1)&&(r_active>=1)))||((off>=1)&&(r_active>=1)))||((moved>=1)&&(p_m>=1)))&&((((((p_sc<1)&&(p_rel<1))&&(p_i1<1))&&((move<1)||(r_active<1)))&&((off<1)||(r_active<1)))||((((p_sc<1)&&(p_rel<1))&&((move<1)||(r_active<1)))&&((initialized<1)||(p_i2<1))))))) * ((initialize<1)||(r_stopped<1))) * ((off<1)||(r_active<1))))))] = FALSE
Reverse transition relation is exact ! Faster fixpoint algorithm enabled.
Detected timeout of ITS tools.
[2021-05-14 00:10:32] [INFO ] Flatten gal took : 2 ms
[2021-05-14 00:10:32] [INFO ] Applying decomposition
[2021-05-14 00:10:32] [INFO ] Flatten gal took : 1 ms
Converted graph to binary with : CommandLine [args=[/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.louvain.binaries_1.0.0.202104292328/bin/convert-linux64, -i, /tmp/graph14364975309291358666.txt, -o, /tmp/graph14364975309291358666.bin, -w, /tmp/graph14364975309291358666.weights], workingDir=null]
Built communities with : CommandLine [args=[/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.louvain.binaries_1.0.0.202104292328/bin/louvain-linux64, /tmp/graph14364975309291358666.bin, -l, -1, -v, -w, /tmp/graph14364975309291358666.weights, -q, 0, -e, 0.001], workingDir=null]
[2021-05-14 00:10:32] [INFO ] Decomposing Gal with order
[2021-05-14 00:10:32] [INFO ] Rewriting arrays to variables to allow decomposition.
[2021-05-14 00:10:32] [INFO ] Flatten gal took : 31 ms
[2021-05-14 00:10:32] [INFO ] Fuse similar labels procedure discarded/fused a total of 0 labels/synchronizations in 1 ms.
[2021-05-14 00:10:32] [INFO ] Time to serialize gal into /tmp/CTLFireability497730673261408541.gal : 6 ms
[2021-05-14 00:10:32] [INFO ] Time to serialize properties into /tmp/CTLFireability14067379766778093531.ctl : 7 ms
Invoking ITS tools like this :CommandLine [args=[/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.202104292328/bin/its-ctl-linux64, --gc-threshold, 2000000, --quiet, -i, /tmp/CTLFireability497730673261408541.gal, -t, CGAL, -ctl, /tmp/CTLFireability14067379766778093531.ctl], workingDir=/home/mcc/execution]
its-ctl command run as :
/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.202104292328/bin/its-ctl-linux64 --gc-threshold 2000000 --quiet -i /tmp/CTLFireability497730673261408541.gal -t CGAL -ctl /tmp/CTLFireability14067379766778093531.ctl
No direction supplied, using forward translation only.
Parsed 1 CTL formulae.
Detected timeout of ITS tools.
Applied a total of 0 rules in 2 ms. Remains 15 /15 variables (removed 0) and now considering 11/11 (removed 0) transitions.
[2021-05-14 00:11:02] [INFO ] Flatten gal took : 8 ms
[2021-05-14 00:11:02] [INFO ] Flatten gal took : 1 ms
[2021-05-14 00:11:02] [INFO ] Input system was already deterministic with 11 transitions.
[2021-05-14 00:11:02] [INFO ] Flatten gal took : 2 ms
[2021-05-14 00:11:02] [INFO ] Flatten gal took : 1 ms
[2021-05-14 00:11:02] [INFO ] Time to serialize gal into /tmp/CTLFireability10680403963593942744.gal : 1 ms
[2021-05-14 00:11:02] [INFO ] Time to serialize properties into /tmp/CTLFireability15111978637469636856.ctl : 9 ms
Invoking ITS tools like this :CommandLine [args=[/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.202104292328/bin/its-ctl-linux64, --gc-threshold, 2000000, --quiet, -i, /tmp/CTLFireability10680403963593942744.gal, -t, CGAL, -ctl, /tmp/CTLFireability15111978637469636856.ctl, --gen-order, FOLLOW], workingDir=/home/mcc/execution]
its-ctl command run as :
/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.202104292328/bin/its-ctl-linux64 --gc-threshold 2000000 --quiet -i /tmp/CTLFireability10680403963593942744.gal -t CGAL -ctl /tmp/CTLFireability15111978637469636856.ctl --gen-order FOLLOW
No direction supplied, using forward translation only.
Parsed 1 CTL formulae.
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
reachable,4.10891e+09,15.3196,231076,2,21938,5,1.41887e+06,6,0,74,1.47079e+06,0
Converting to forward existential form...Done !
original formula: !(AF(!(AG((((((r_moving>=1)||((initialized>=1)&&(p_i2>=1)))||((moved>=1)&&(p_m>=1)))||((p_rdy>=1)&&(access>=1)))||(p_i1>=1))))))
=> equivalent forward existential formula: [FwdG(Init,!(!(!(E(TRUE U !((((((r_moving>=1)||((initialized>=1)&&(p_i2>=1)))||((moved>=1)&&(p_m>=1)))||((p_rdy>=1)&&(access>=1)))||(p_i1>=1))))))))] != FALSE
Reverse transition relation is exact ! Faster fixpoint algorithm enabled.
(forward)formula 0,0,20.0044,231076,1,0,6,1.41887e+06,21,0,953,1.47079e+06,7
FORMULA RobotManipulation-PT-00020-CTLFireability-14 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is FALSE !
***************************************
Discarding 1 places :
Implicit places reduction removed 1 places
Iterating post reduction 0 with 1 rules applied. Total rules applied 1 place count 14 transition count 11
Applied a total of 1 rules in 2 ms. Remains 14 /15 variables (removed 1) and now considering 11/11 (removed 0) transitions.
[2021-05-14 00:11:22] [INFO ] Flatten gal took : 1 ms
[2021-05-14 00:11:22] [INFO ] Flatten gal took : 2 ms
[2021-05-14 00:11:22] [INFO ] Input system was already deterministic with 11 transitions.
[2021-05-14 00:11:22] [INFO ] Flatten gal took : 2 ms
[2021-05-14 00:11:22] [INFO ] Flatten gal took : 2 ms
[2021-05-14 00:11:22] [INFO ] Time to serialize gal into /tmp/CTLFireability391050276484854823.gal : 0 ms
[2021-05-14 00:11:22] [INFO ] Time to serialize properties into /tmp/CTLFireability8093016724237748150.ctl : 1 ms
Invoking ITS tools like this :CommandLine [args=[/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.202104292328/bin/its-ctl-linux64, --gc-threshold, 2000000, --quiet, -i, /tmp/CTLFireability391050276484854823.gal, -t, CGAL, -ctl, /tmp/CTLFireability8093016724237748150.ctl, --gen-order, FOLLOW], workingDir=/home/mcc/execution]
its-ctl command run as :
/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.202104292328/bin/its-ctl-linux64 --gc-threshold 2000000 --quiet -i /tmp/CTLFireability391050276484854823.gal -t CGAL -ctl /tmp/CTLFireability8093016724237748150.ctl --gen-order FOLLOW
No direction supplied, using forward translation only.
Parsed 1 CTL formulae.
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
reachable,4.10891e+09,15.1572,223572,2,21077,5,1.36057e+06,6,0,70,1.39042e+06,0
Converting to forward existential form...Done !
original formula: AG(A(AF((((((((((p_rel<1)&&(r_moving<1))&&(p_sc<1))&&(p_i1<1))&&((move<1)||(r_active<1)))&&((initialized<1)||(p_i2<1)))&&((initialize<1)||(r_stopped<1)))&&((move<1)||(r_active<1)))&&((initialized<1)||(p_i2<1)))) U !(AG(((move<1)||(r_active<1))))))
=> equivalent forward existential formula: ([((FwdU(FwdU(Init,TRUE),!(!(!(E(TRUE U !(((move<1)||(r_active<1)))))))) * !(!(EG(!((((((((((p_rel<1)&&(r_moving<1))&&(p_sc<1))&&(p_i1<1))&&((move<1)||(r_active<1)))&&((initialized<1)||(p_i2<1)))&&((initialize<1)||(r_stopped<1)))&&((move<1)||(r_active<1)))&&((initialized<1)||(p_i2<1)))))))) * !(E(TRUE U !(((move<1)||(r_active<1))))))] = FALSE * [FwdG(FwdU(Init,TRUE),!(!(!(E(TRUE U !(((move<1)||(r_active<1))))))))] = FALSE)
Reverse transition relation is exact ! Faster fixpoint algorithm enabled.
(forward)formula 0,1,18.4151,223572,1,0,6,1.36057e+06,21,0,877,1.39042e+06,7
FORMULA RobotManipulation-PT-00020-CTLFireability-15 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
[2021-05-14 00:11:41] [INFO ] Flatten gal took : 5 ms
[2021-05-14 00:11:41] [INFO ] Flatten gal took : 4 ms
[2021-05-14 00:11:41] [INFO ] Applying decomposition
[2021-05-14 00:11:41] [INFO ] Flatten gal took : 5 ms
Converted graph to binary with : CommandLine [args=[/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.louvain.binaries_1.0.0.202104292328/bin/convert-linux64, -i, /tmp/graph14721596454960965148.txt, -o, /tmp/graph14721596454960965148.bin, -w, /tmp/graph14721596454960965148.weights], workingDir=null]
Built communities with : CommandLine [args=[/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.louvain.binaries_1.0.0.202104292328/bin/louvain-linux64, /tmp/graph14721596454960965148.bin, -l, -1, -v, -w, /tmp/graph14721596454960965148.weights, -q, 0, -e, 0.001], workingDir=null]
[2021-05-14 00:11:41] [INFO ] Decomposing Gal with order
[2021-05-14 00:11:41] [INFO ] Rewriting arrays to variables to allow decomposition.
[2021-05-14 00:11:41] [INFO ] Flatten gal took : 10 ms
[2021-05-14 00:11:41] [INFO ] Fuse similar labels procedure discarded/fused a total of 0 labels/synchronizations in 1 ms.
[2021-05-14 00:11:41] [INFO ] Time to serialize gal into /tmp/CTLFireability1635657079333086778.gal : 1 ms
[2021-05-14 00:11:41] [INFO ] Time to serialize properties into /tmp/CTLFireability9865452149727667034.ctl : 8 ms
Invoking ITS tools like this :CommandLine [args=[/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.202104292328/bin/its-ctl-linux64, --gc-threshold, 2000000, --quiet, -i, /tmp/CTLFireability1635657079333086778.gal, -t, CGAL, -ctl, /tmp/CTLFireability9865452149727667034.ctl], workingDir=/home/mcc/execution]
its-ctl command run as :
/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.202104292328/bin/its-ctl-linux64 --gc-threshold 2000000 --quiet -i /tmp/CTLFireability1635657079333086778.gal -t CGAL -ctl /tmp/CTLFireability9865452149727667034.ctl
No direction supplied, using forward translation only.
Parsed 12 CTL formulae.
Detected timeout of ITS tools.
[2021-05-14 00:32:15] [INFO ] Flatten gal took : 5 ms
[2021-05-14 00:32:15] [INFO ] Time to serialize gal into /tmp/CTLFireability5853647118124676109.gal : 2 ms
[2021-05-14 00:32:15] [INFO ] Time to serialize properties into /tmp/CTLFireability12727880877259100765.ctl : 5 ms
Invoking ITS tools like this :CommandLine [args=[/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.202104292328/bin/its-ctl-linux64, --gc-threshold, 2000000, --quiet, -i, /tmp/CTLFireability5853647118124676109.gal, -t, CGAL, -ctl, /tmp/CTLFireability12727880877259100765.ctl, --gen-order, FOLLOW], workingDir=/home/mcc/execution]
its-ctl command run as :
/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.202104292328/bin/its-ctl-linux64 --gc-threshold 2000000 --quiet -i /tmp/CTLFireability5853647118124676109.gal -t CGAL -ctl /tmp/CTLFireability12727880877259100765.ctl --gen-order FOLLOW
No direction supplied, using forward translation only.
Parsed 12 CTL formulae.
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
reachable,4.10891e+09,15.7766,231496,2,21938,5,1.41887e+06,6,0,74,1.47079e+06,0
Converting to forward existential form...Done !
original formula: EX(AG((E(AF((((initialize>=1)&&(r_stopped>=1))||(p_rdy>=1))) U E((((((((((move>=1)&&(r_active>=1))||(r_moving>=1))||((initialized>=1)&&(p_i2>=1)))||((off>=1)&&(r_active>=1)))||(p_sc>=1))||((p_rdy>=1)&&(access>=1)))||(p_rel>=1))||(p_i1>=1)) U ((((r_moving>=1)||(p_rdy>=1))||(p_rel>=1))||(p_i1>=1)))) + EF(AG((((((r_moving>=1)||((off>=1)&&(r_active>=1)))||((initialized>=1)&&(p_i2>=1)))||(p_sc>=1))||((moved>=1)&&(p_m>=1))))))))
=> equivalent forward existential formula: [(EY(Init) * !(E(TRUE U !((E(!(EG(!((((initialize>=1)&&(r_stopped>=1))||(p_rdy>=1))))) U E((((((((((move>=1)&&(r_active>=1))||(r_moving>=1))||((initialized>=1)&&(p_i2>=1)))||((off>=1)&&(r_active>=1)))||(p_sc>=1))||((p_rdy>=1)&&(access>=1)))||(p_rel>=1))||(p_i1>=1)) U ((((r_moving>=1)||(p_rdy>=1))||(p_rel>=1))||(p_i1>=1)))) + E(TRUE U !(E(TRUE U !((((((r_moving>=1)||((off>=1)&&(r_active>=1)))||((initialized>=1)&&(p_i2>=1)))||(p_sc>=1))||((moved>=1)&&(p_m>=1))))))))))))] != FALSE
Reverse transition relation is exact ! Faster fixpoint algorithm enabled.
Hit Full ! (commute/partial/dont) 0/0/11
(forward)formula 0,1,90.0427,1170832,1,0,10,6.52476e+06,33,1,979,6.00709e+06,15
FORMULA RobotManipulation-PT-00020-CTLFireability-00 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: EX((AF((A(((initialize>=1)&&(r_stopped>=1)) U ((((((((((initialize>=1)&&(r_stopped>=1))||((move>=1)&&(r_active>=1)))||(r_moving>=1))||((off>=1)&&(r_active>=1)))||((initialized>=1)&&(p_i2>=1)))||(p_sc>=1))||(p_rel>=1))||((moved>=1)&&(p_m>=1)))||(p_i1>=1))) + AG((((((((((initialize>=1)&&(r_stopped>=1))||(r_moving>=1))||((off>=1)&&(r_active>=1)))||((initialized>=1)&&(p_i2>=1)))||(p_sc>=1))||((moved>=1)&&(p_m>=1)))||(p_rel>=1))||((p_rdy>=1)&&(access>=1)))))) * !(AG((((((((((((((((AG(((((((((initialize>=1)&&(r_stopped>=1))||((off>=1)&&(r_active>=1)))||((initialized>=1)&&(p_i2>=1)))||(p_rdy>=1))||(p_sc>=1))||(p_rel>=1))||((p_rdy>=1)&&(access>=1)))) + ((initialize>=1)&&(r_stopped>=1))) + ((move>=1)&&(r_active>=1))) + ((initialized>=1)&&(p_i2>=1))) + (p_rdy>=1)) + ((off>=1)&&(r_active>=1))) + (p_sc>=1)) + (p_rel>=1)) + ((moved>=1)&&(p_m>=1))) + (p_i1>=1)) + ((move>=1)&&(r_active>=1))) + (p_sc>=1)) + ((moved>=1)&&(p_m>=1))) + ((p_rdy>=1)&&(access>=1))) + ((initialized>=1)&&(p_i2>=1))) + (p_sc>=1))))))
=> equivalent forward existential formula: [(FwdU((((((((((((((((FwdU((EY(Init) * !(EG(!((!((E(!(((((((((((initialize>=1)&&(r_stopped>=1))||((move>=1)&&(r_active>=1)))||(r_moving>=1))||((off>=1)&&(r_active>=1)))||((initialized>=1)&&(p_i2>=1)))||(p_sc>=1))||(p_rel>=1))||((moved>=1)&&(p_m>=1)))||(p_i1>=1))) U (!(((initialize>=1)&&(r_stopped>=1))) * !(((((((((((initialize>=1)&&(r_stopped>=1))||((move>=1)&&(r_active>=1)))||(r_moving>=1))||((off>=1)&&(r_active>=1)))||((initialized>=1)&&(p_i2>=1)))||(p_sc>=1))||(p_rel>=1))||((moved>=1)&&(p_m>=1)))||(p_i1>=1))))) + EG(!(((((((((((initialize>=1)&&(r_stopped>=1))||((move>=1)&&(r_active>=1)))||(r_moving>=1))||((off>=1)&&(r_active>=1)))||((initialized>=1)&&(p_i2>=1)))||(p_sc>=1))||(p_rel>=1))||((moved>=1)&&(p_m>=1)))||(p_i1>=1)))))) + !(E(TRUE U !((((((((((initialize>=1)&&(r_stopped>=1))||(r_moving>=1))||((off>=1)&&(r_active>=1)))||((initialized>=1)&&(p_i2>=1)))||(p_sc>=1))||((moved>=1)&&(p_m>=1)))||(p_rel>=1))||((p_rdy>=1)&&(access>=1))))))))))),TRUE) * !((p_sc>=1))) * !(((initialized>=1)&&(p_i2>=1)))) * !(((p_rdy>=1)&&(access>=1)))) * !(((moved>=1)&&(p_m>=1)))) * !((p_sc>=1))) * !(((move>=1)&&(r_active>=1)))) * !((p_i1>=1))) * !(((moved>=1)&&(p_m>=1)))) * !((p_rel>=1))) * !((p_sc>=1))) * !(((off>=1)&&(r_active>=1)))) * !((p_rdy>=1))) * !(((initialized>=1)&&(p_i2>=1)))) * !(((move>=1)&&(r_active>=1)))) * !(((initialize>=1)&&(r_stopped>=1)))),TRUE) * !(((((((((initialize>=1)&&(r_stopped>=1))||((off>=1)&&(r_active>=1)))||((initialized>=1)&&(p_i2>=1)))||(p_rdy>=1))||(p_sc>=1))||(p_rel>=1))||((p_rdy>=1)&&(access>=1)))))] != FALSE
Hit Full ! (commute/partial/dont) 0/43/11
Using saturation style SCC detection
(forward)formula 1,1,131.708,1822916,1,0,41,1.02384e+07,74,29,1092,1.03145e+07,37
FORMULA RobotManipulation-PT-00020-CTLFireability-01 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: !(EX((EG((((((move<1)||(r_active<1))&&(r_moving<1))&&((off<1)||(r_active<1)))&&(p_rel<1))) + ((!(AX(((((((((((initialize>=1)&&(r_stopped>=1))||(r_moving>=1))||((off>=1)&&(r_active>=1)))||((initialized>=1)&&(p_i2>=1)))||(p_rdy>=1))||(p_sc>=1))||((moved>=1)&&(p_m>=1)))||(p_rel>=1))||((p_rdy>=1)&&(access>=1))))) * (((((move<1)||(r_active<1))&&(p_rdy<1))&&(p_i1<1)) + !(EF(((p_sc>=1)||(p_i1>=1)))))) * ((((EF(((((((((initialize>=1)&&(r_stopped>=1))||((move>=1)&&(r_active>=1)))||((initialized>=1)&&(p_i2>=1)))||(p_rdy>=1))||((moved>=1)&&(p_m>=1)))||((p_rdy>=1)&&(access>=1)))||(p_i1>=1))) * ((((((((initialize>=1)&&(r_stopped>=1))||(r_moving>=1))||((off>=1)&&(r_active>=1)))||(p_sc>=1))||((moved>=1)&&(p_m>=1)))||(p_rel>=1))||(p_rdy>=1))) * AF((((((((((((initialize>=1)&&(r_stopped>=1))||((move>=1)&&(r_active>=1)))||(r_moving>=1))||(p_rdy>=1))||((initialized>=1)&&(p_i2>=1)))||((off>=1)&&(r_active>=1)))||(p_sc>=1))||((p_rdy>=1)&&(access>=1)))||(p_rel>=1))||(p_i1>=1)))) + !(EG((((p_rdy>=1)||((p_rdy>=1)&&(access>=1)))||(p_i1>=1))))) + AG((((((((initialize>=1)&&(r_stopped>=1))||((move>=1)&&(r_active>=1)))||(r_moving>=1))||(p_rdy>=1))||((off>=1)&&(r_active>=1)))||((moved>=1)&&(p_m>=1)))))))))
=> equivalent forward existential formula: ([FwdG(EY(Init),(((((move<1)||(r_active<1))&&(r_moving<1))&&((off<1)||(r_active<1)))&&(p_rel<1)))] = FALSE * (([(((EY(Init) * (!(!(EX(!(((((((((((initialize>=1)&&(r_stopped>=1))||(r_moving>=1))||((off>=1)&&(r_active>=1)))||((initialized>=1)&&(p_i2>=1)))||(p_rdy>=1))||(p_sc>=1))||((moved>=1)&&(p_m>=1)))||(p_rel>=1))||((p_rdy>=1)&&(access>=1))))))) * (((((move<1)||(r_active<1))&&(p_rdy<1))&&(p_i1<1)) + !(E(TRUE U ((p_sc>=1)||(p_i1>=1))))))) * (E(TRUE U ((((((((initialize>=1)&&(r_stopped>=1))||((move>=1)&&(r_active>=1)))||((initialized>=1)&&(p_i2>=1)))||(p_rdy>=1))||((moved>=1)&&(p_m>=1)))||((p_rdy>=1)&&(access>=1)))||(p_i1>=1))) * ((((((((initialize>=1)&&(r_stopped>=1))||(r_moving>=1))||((off>=1)&&(r_active>=1)))||(p_sc>=1))||((moved>=1)&&(p_m>=1)))||(p_rel>=1))||(p_rdy>=1)))) * !(EG(!((((((((((((initialize>=1)&&(r_stopped>=1))||((move>=1)&&(r_active>=1)))||(r_moving>=1))||(p_rdy>=1))||((initialized>=1)&&(p_i2>=1)))||((off>=1)&&(r_active>=1)))||(p_sc>=1))||((p_rdy>=1)&&(access>=1)))||(p_rel>=1))||(p_i1>=1))))))] = FALSE * [((EY(Init) * (!(!(EX(!(((((((((((initialize>=1)&&(r_stopped>=1))||(r_moving>=1))||((off>=1)&&(r_active>=1)))||((initialized>=1)&&(p_i2>=1)))||(p_rdy>=1))||(p_sc>=1))||((moved>=1)&&(p_m>=1)))||(p_rel>=1))||((p_rdy>=1)&&(access>=1))))))) * (((((move<1)||(r_active<1))&&(p_rdy<1))&&(p_i1<1)) + !(E(TRUE U ((p_sc>=1)||(p_i1>=1))))))) * !(EG((((p_rdy>=1)||((p_rdy>=1)&&(access>=1)))||(p_i1>=1)))))] = FALSE) * [((EY(Init) * (!(!(EX(!(((((((((((initialize>=1)&&(r_stopped>=1))||(r_moving>=1))||((off>=1)&&(r_active>=1)))||((initialized>=1)&&(p_i2>=1)))||(p_rdy>=1))||(p_sc>=1))||((moved>=1)&&(p_m>=1)))||(p_rel>=1))||((p_rdy>=1)&&(access>=1))))))) * (((((move<1)||(r_active<1))&&(p_rdy<1))&&(p_i1<1)) + !(E(TRUE U ((p_sc>=1)||(p_i1>=1))))))) * !(E(TRUE U !((((((((initialize>=1)&&(r_stopped>=1))||((move>=1)&&(r_active>=1)))||(r_moving>=1))||(p_rdy>=1))||((off>=1)&&(r_active>=1)))||((moved>=1)&&(p_m>=1)))))))] = FALSE))
Hit Full ! (commute/partial/dont) 3/10/8
(forward)formula 2,1,154.278,2165564,1,0,52,1.20727e+07,105,33,1170,1.21152e+07,57
FORMULA RobotManipulation-PT-00020-CTLFireability-02 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: AG(AF(EX(AG(E((((((((r_moving>=1)||(p_rdy>=1))||(p_i1>=1))||((initialize>=1)&&(r_stopped>=1)))||((move>=1)&&(r_active>=1)))||((off>=1)&&(r_active>=1)))||((moved>=1)&&(p_m>=1))) U ((((((p_rdy>=1)||(p_sc>=1))||(p_i1>=1))||((initialize>=1)&&(r_stopped>=1)))||((off>=1)&&(r_active>=1)))||((moved>=1)&&(p_m>=1))))))))
=> equivalent forward existential formula: [FwdG(FwdU(Init,TRUE),!(EX(!(E(TRUE U !(E((((((((r_moving>=1)||(p_rdy>=1))||(p_i1>=1))||((initialize>=1)&&(r_stopped>=1)))||((move>=1)&&(r_active>=1)))||((off>=1)&&(r_active>=1)))||((moved>=1)&&(p_m>=1))) U ((((((p_rdy>=1)||(p_sc>=1))||(p_i1>=1))||((initialize>=1)&&(r_stopped>=1)))||((off>=1)&&(r_active>=1)))||((moved>=1)&&(p_m>=1))))))))))] = FALSE
Hit Full ! (commute/partial/dont) 0/0/11
(forward)formula 3,0,195.853,2328504,1,0,56,1.30088e+07,15,34,869,1.304e+07,5
FORMULA RobotManipulation-PT-00020-CTLFireability-03 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is FALSE !
***************************************
original formula: (AG(((((((((((((EF((((((((initialize>=1)&&(r_stopped>=1))||((initialized>=1)&&(p_i2>=1)))||(p_rdy>=1))||((moved>=1)&&(p_m>=1)))||(p_rel>=1))||(p_i1>=1))) + !(EX((((((((((((initialize>=1)&&(r_stopped>=1))||((move>=1)&&(r_active>=1)))||(r_moving>=1))||((initialized>=1)&&(p_i2>=1)))||(p_rdy>=1))||((off>=1)&&(r_active>=1)))||((moved>=1)&&(p_m>=1)))||((p_rdy>=1)&&(access>=1)))||(p_rel>=1))||(p_i1>=1))))) + (((((((((((EG(((((((initialize>=1)&&(r_stopped>=1))||((move>=1)&&(r_active>=1)))||(p_sc>=1))||(p_rel>=1))||(p_i1>=1))) * ((((((((((((p_rdy>=1)&&(access>=1))||((initialize>=1)&&(r_stopped>=1)))||((move>=1)&&(r_active>=1)))||(r_moving>=1))||((off>=1)&&(r_active>=1)))||(p_rdy>=1))||((initialized>=1)&&(p_i2>=1)))||(p_rel>=1))||((moved>=1)&&(p_m>=1)))||((p_rdy>=1)&&(access>=1)))||(p_i1>=1))) * ((initialize<1)||(r_stopped<1))) * (r_moving<1)) * (p_rdy<1)) * ((initialized<1)||(p_i2<1))) * ((off<1)||(r_active<1))) * (p_sc<1)) * ((p_rdy<1)||(access<1))) * (p_rel<1)) * ((moved<1)||(p_m<1))) * (p_i1<1))) + EF((((((((((((initialize>=1)&&(r_stopped>=1))||((move>=1)&&(r_active>=1)))||(r_moving>=1))||((initialized>=1)&&(p_i2>=1)))||((off>=1)&&(r_active>=1)))||(p_sc>=1))||((moved>=1)&&(p_m>=1)))||((p_rdy>=1)&&(access>=1)))||(p_i1>=1))&&((((((((((initialize>=1)&&(r_stopped>=1))||((move>=1)&&(r_active>=1)))||(r_moving>=1))||((off>=1)&&(r_active>=1)))||((initialized>=1)&&(p_i2>=1)))||(p_rdy>=1))||(p_sc>=1))||((moved>=1)&&(p_m>=1)))||(p_rel>=1))))) + ((move>=1)&&(r_active>=1))) + (r_moving>=1)) + (p_rdy>=1)) + ((initialized>=1)&&(p_i2>=1))) + ((off>=1)&&(r_active>=1))) + (p_sc>=1)) + ((moved>=1)&&(p_m>=1))) + (p_rel>=1)) + (p_i1>=1))) + !(EG((AG(((((((((initialize>=1)&&(r_stopped>=1))||((off>=1)&&(r_active>=1)))||(p_rdy>=1))||((initialized>=1)&&(p_i2>=1)))||(p_sc>=1))||((p_rdy>=1)&&(access>=1)))||(p_rel>=1))) + (E(EG((((initialize>=1)&&(r_stopped>=1))||((off>=1)&&(r_active>=1)))) U ((((initialize<1)||(r_stopped<1))&&((off<1)||(r_active<1)))&&((moved<1)||(p_m<1)))) * (!(EX((((((move>=1)&&(r_active>=1))||((off>=1)&&(r_active>=1)))||(p_sc>=1))||((moved>=1)&&(p_m>=1))))) + !(AF((((((((initialize>=1)&&(r_stopped>=1))||((initialized>=1)&&(p_i2>=1)))||(p_sc>=1))||(p_rel>=1))||((p_rdy>=1)&&(access>=1)))||((moved>=1)&&(p_m>=1)))))))))))
=> equivalent forward existential formula: [FwdG((Init * !(!(E(TRUE U !(((((((((((((E(TRUE U (((((((initialize>=1)&&(r_stopped>=1))||((initialized>=1)&&(p_i2>=1)))||(p_rdy>=1))||((moved>=1)&&(p_m>=1)))||(p_rel>=1))||(p_i1>=1))) + !(EX((((((((((((initialize>=1)&&(r_stopped>=1))||((move>=1)&&(r_active>=1)))||(r_moving>=1))||((initialized>=1)&&(p_i2>=1)))||(p_rdy>=1))||((off>=1)&&(r_active>=1)))||((moved>=1)&&(p_m>=1)))||((p_rdy>=1)&&(access>=1)))||(p_rel>=1))||(p_i1>=1))))) + (((((((((((EG(((((((initialize>=1)&&(r_stopped>=1))||((move>=1)&&(r_active>=1)))||(p_sc>=1))||(p_rel>=1))||(p_i1>=1))) * ((((((((((((p_rdy>=1)&&(access>=1))||((initialize>=1)&&(r_stopped>=1)))||((move>=1)&&(r_active>=1)))||(r_moving>=1))||((off>=1)&&(r_active>=1)))||(p_rdy>=1))||((initialized>=1)&&(p_i2>=1)))||(p_rel>=1))||((moved>=1)&&(p_m>=1)))||((p_rdy>=1)&&(access>=1)))||(p_i1>=1))) * ((initialize<1)||(r_stopped<1))) * (r_moving<1)) * (p_rdy<1)) * ((initialized<1)||(p_i2<1))) * ((off<1)||(r_active<1))) * (p_sc<1)) * ((p_rdy<1)||(access<1))) * (p_rel<1)) * ((moved<1)||(p_m<1))) * (p_i1<1))) + E(TRUE U (((((((((((initialize>=1)&&(r_stopped>=1))||((move>=1)&&(r_active>=1)))||(r_moving>=1))||((initialized>=1)&&(p_i2>=1)))||((off>=1)&&(r_active>=1)))||(p_sc>=1))||((moved>=1)&&(p_m>=1)))||((p_rdy>=1)&&(access>=1)))||(p_i1>=1))&&((((((((((initialize>=1)&&(r_stopped>=1))||((move>=1)&&(r_active>=1)))||(r_moving>=1))||((off>=1)&&(r_active>=1)))||((initialized>=1)&&(p_i2>=1)))||(p_rdy>=1))||(p_sc>=1))||((moved>=1)&&(p_m>=1)))||(p_rel>=1))))) + ((move>=1)&&(r_active>=1))) + (r_moving>=1)) + (p_rdy>=1)) + ((initialized>=1)&&(p_i2>=1))) + ((off>=1)&&(r_active>=1))) + (p_sc>=1)) + ((moved>=1)&&(p_m>=1))) + (p_rel>=1)) + (p_i1>=1))))))),(!(E(TRUE U !(((((((((initialize>=1)&&(r_stopped>=1))||((off>=1)&&(r_active>=1)))||(p_rdy>=1))||((initialized>=1)&&(p_i2>=1)))||(p_sc>=1))||((p_rdy>=1)&&(access>=1)))||(p_rel>=1))))) + (E(EG((((initialize>=1)&&(r_stopped>=1))||((off>=1)&&(r_active>=1)))) U ((((initialize<1)||(r_stopped<1))&&((off<1)||(r_active<1)))&&((moved<1)||(p_m<1)))) * (!(EX((((((move>=1)&&(r_active>=1))||((off>=1)&&(r_active>=1)))||(p_sc>=1))||((moved>=1)&&(p_m>=1))))) + !(!(EG(!((((((((initialize>=1)&&(r_stopped>=1))||((initialized>=1)&&(p_i2>=1)))||(p_sc>=1))||(p_rel>=1))||((p_rdy>=1)&&(access>=1)))||((moved>=1)&&(p_m>=1)))))))))))] = FALSE
(forward)formula 4,1,280.682,2328504,1,0,294,1.30088e+07,69,184,958,1.33787e+07,206
FORMULA RobotManipulation-PT-00020-CTLFireability-05 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: !(AX(!(EG(((p_rdy<1)||(access<1))))))
=> equivalent forward existential formula: [FwdG(EY(Init),((p_rdy<1)||(access<1)))] != FALSE
Hit Full ! (commute/partial/dont) 7/0/4
(forward)formula 5,0,280.888,2328504,1,0,295,1.30088e+07,75,185,981,1.34035e+07,210
FORMULA RobotManipulation-PT-00020-CTLFireability-06 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is FALSE !
***************************************
original formula: (A((((((((((initialize>=1)&&(r_stopped>=1))||((move>=1)&&(r_active>=1)))||(r_moving>=1))||((off>=1)&&(r_active>=1)))||((initialized>=1)&&(p_i2>=1)))||(p_rdy>=1))||((moved>=1)&&(p_m>=1)))||(p_i1>=1)) U ((initialize>=1)&&(r_stopped>=1))) * E(AF((((((((((((((((((initialize<1)||(r_stopped<1))&&((initialized<1)||(p_i2<1)))&&(p_rdy<1))&&((off<1)||(r_active<1)))&&((moved<1)||(p_m<1)))&&((p_rdy<1)||(access<1)))&&(p_rel<1))&&(p_i1<1))||((((((((((move<1)||(r_active<1))&&(r_moving<1))&&(p_rdy<1))&&((off<1)||(r_active<1)))&&(p_sc<1))&&((p_rdy<1)||(access<1)))&&((moved<1)||(p_m<1)))&&(p_rel<1))&&(p_i1<1))) * !(EX(((((((((((initialize>=1)&&(r_stopped>=1))||((move>=1)&&(r_active>=1)))||(r_moving>=1))||((initialized>=1)&&(p_i2>=1)))||(p_rdy>=1))||(p_sc>=1))||((moved>=1)&&(p_m>=1)))||((p_rdy>=1)&&(access>=1)))||(p_rel>=1))))) + ((initialize>=1)&&(r_stopped>=1))) + ((move>=1)&&(r_active>=1))) + (r_moving>=1)) + ((off>=1)&&(r_active>=1))) + (p_sc>=1)) + ((p_rdy>=1)&&(access>=1)))) U E(((((off>=1)&&(r_active>=1))||(p_sc>=1))||((moved>=1)&&(p_m>=1))) U !(AF(AG((((((((((initialize>=1)&&(r_stopped>=1))||(r_moving>=1))||((initialized>=1)&&(p_i2>=1)))||(p_sc>=1))||((p_rdy>=1)&&(access>=1)))||(p_rel>=1))||((moved>=1)&&(p_m>=1)))||(p_i1>=1))))))))
=> equivalent forward existential formula: [FwdG(FwdU(FwdU((Init * !((E(!(((initialize>=1)&&(r_stopped>=1))) U (!((((((((((initialize>=1)&&(r_stopped>=1))||((move>=1)&&(r_active>=1)))||(r_moving>=1))||((off>=1)&&(r_active>=1)))||((initialized>=1)&&(p_i2>=1)))||(p_rdy>=1))||((moved>=1)&&(p_m>=1)))||(p_i1>=1))) * !(((initialize>=1)&&(r_stopped>=1))))) + EG(!(((initialize>=1)&&(r_stopped>=1))))))),!(EG(!((((((((((((((((((initialize<1)||(r_stopped<1))&&((initialized<1)||(p_i2<1)))&&(p_rdy<1))&&((off<1)||(r_active<1)))&&((moved<1)||(p_m<1)))&&((p_rdy<1)||(access<1)))&&(p_rel<1))&&(p_i1<1))||((((((((((move<1)||(r_active<1))&&(r_moving<1))&&(p_rdy<1))&&((off<1)||(r_active<1)))&&(p_sc<1))&&((p_rdy<1)||(access<1)))&&((moved<1)||(p_m<1)))&&(p_rel<1))&&(p_i1<1))) * !(EX(((((((((((initialize>=1)&&(r_stopped>=1))||((move>=1)&&(r_active>=1)))||(r_moving>=1))||((initialized>=1)&&(p_i2>=1)))||(p_rdy>=1))||(p_sc>=1))||((moved>=1)&&(p_m>=1)))||((p_rdy>=1)&&(access>=1)))||(p_rel>=1))))) + ((initialize>=1)&&(r_stopped>=1))) + ((move>=1)&&(r_active>=1))) + (r_moving>=1)) + ((off>=1)&&(r_active>=1))) + (p_sc>=1)) + ((p_rdy>=1)&&(access>=1))))))),((((off>=1)&&(r_active>=1))||(p_sc>=1))||((moved>=1)&&(p_m>=1)))),!(!(E(TRUE U !((((((((((initialize>=1)&&(r_stopped>=1))||(r_moving>=1))||((initialized>=1)&&(p_i2>=1)))||(p_sc>=1))||((p_rdy>=1)&&(access>=1)))||(p_rel>=1))||((moved>=1)&&(p_m>=1)))||(p_i1>=1)))))))] != FALSE
Hit Full ! (commute/partial/dont) 8/0/3
Using saturation style SCC detection
Hit Full ! (commute/partial/dont) 3/0/8
(forward)formula 6,1,300.293,2328504,1,0,312,1.30088e+07,104,196,1082,1.50299e+07,227
FORMULA RobotManipulation-PT-00020-CTLFireability-07 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: EF((!(EF(AX(((((((((initialize<1)||(r_stopped<1))&&((move<1)||(r_active<1)))&&(r_moving<1))&&((off<1)||(r_active<1)))&&(p_sc<1))&&((moved<1)||(p_m<1)))&&((p_rdy<1)||(access<1)))))) * (!(AF((((r_moving>=1)||(p_rdy>=1))||(p_sc>=1)))) + !(EF((EF((((initialized>=1)&&(p_i2>=1))||((p_rdy>=1)&&(access>=1)))) + ((((((((initialize>=1)&&(r_stopped>=1))||((move>=1)&&(r_active>=1)))||((initialized>=1)&&(p_i2>=1)))||(p_sc>=1))||(p_i1>=1))&&(p_rdy>=1))&&(access>=1))))))))
=> equivalent forward existential formula: ([FwdG((FwdU(Init,TRUE) * !(E(TRUE U !(EX(!(((((((((initialize<1)||(r_stopped<1))&&((move<1)||(r_active<1)))&&(r_moving<1))&&((off<1)||(r_active<1)))&&(p_sc<1))&&((moved<1)||(p_m<1)))&&((p_rdy<1)||(access<1))))))))),!((((r_moving>=1)||(p_rdy>=1))||(p_sc>=1))))] != FALSE + [((FwdU(Init,TRUE) * !(E(TRUE U !(EX(!(((((((((initialize<1)||(r_stopped<1))&&((move<1)||(r_active<1)))&&(r_moving<1))&&((off<1)||(r_active<1)))&&(p_sc<1))&&((moved<1)||(p_m<1)))&&((p_rdy<1)||(access<1))))))))) * !(E(TRUE U (E(TRUE U (((initialized>=1)&&(p_i2>=1))||((p_rdy>=1)&&(access>=1)))) + ((((((((initialize>=1)&&(r_stopped>=1))||((move>=1)&&(r_active>=1)))||((initialized>=1)&&(p_i2>=1)))||(p_sc>=1))||(p_i1>=1))&&(p_rdy>=1))&&(access>=1))))))] != FALSE)
Hit Full ! (commute/partial/dont) 4/13/7
(forward)formula 7,0,327.735,2512896,1,0,316,1.35041e+07,116,197,1130,1.77096e+07,239
FORMULA RobotManipulation-PT-00020-CTLFireability-08 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is FALSE !
***************************************
original formula: EX((EG((EX(((((((initialized>=1)&&(p_i2>=1))||((p_rdy>=1)&&(access>=1)))||(r_moving>=1))||((initialized>=1)&&(p_i2>=1)))||(p_rdy>=1))) + AF(EX(((initialized>=1)&&(p_i2>=1)))))) * ((!(EF((((((((((((initialize>=1)&&(r_stopped>=1))||(r_moving>=1))||(p_rdy>=1))||((off>=1)&&(r_active>=1)))||((initialized>=1)&&(p_i2>=1)))||(p_sc>=1))||((moved>=1)&&(p_m>=1)))||(p_rel>=1))||((p_rdy>=1)&&(access>=1)))||(p_i1>=1)))) + !(EF(AG((((((((((move>=1)&&(r_active>=1))||((off>=1)&&(r_active>=1)))||((initialized>=1)&&(p_i2>=1)))||(p_sc>=1))||(p_rel>=1))||((p_rdy>=1)&&(access>=1)))||((moved>=1)&&(p_m>=1)))||(p_i1>=1)))))) + ((EF((((initialized>=1)&&(p_i2>=1))&&((((((((initialize>=1)&&(r_stopped>=1))||((move>=1)&&(r_active>=1)))||(r_moving>=1))||((initialized>=1)&&(p_i2>=1)))||(p_rdy>=1))||((off>=1)&&(r_active>=1)))||(p_rel>=1)))) * A(AF((((((((off>=1)&&(r_active>=1))||(p_rdy>=1))||((p_rdy>=1)&&(access>=1)))||(p_rel>=1))||((moved>=1)&&(p_m>=1)))||(p_i1>=1))) U ((((((r_moving>=1)||(p_sc>=1))||((move>=1)&&(r_active>=1)))||(p_rdy>=1))||(p_sc>=1))||((moved>=1)&&(p_m>=1))))) * (((((EX(AX(((((((((((initialize>=1)&&(r_stopped>=1))||(r_moving>=1))||(p_rdy>=1))||((initialized>=1)&&(p_i2>=1)))||(p_sc>=1))||(p_rel>=1))||((p_rdy>=1)&&(access>=1)))||((moved>=1)&&(p_m>=1)))||(p_i1>=1)))) + (r_moving>=1)) + (p_rdy>=1)) + (p_rel>=1)) + ((off>=1)&&(r_active>=1))) + ((initialized>=1)&&(p_i2>=1)))))))
=> equivalent forward existential formula: (([((EY(Init) * EG((EX(((((((initialized>=1)&&(p_i2>=1))||((p_rdy>=1)&&(access>=1)))||(r_moving>=1))||((initialized>=1)&&(p_i2>=1)))||(p_rdy>=1))) + !(EG(!(EX(((initialized>=1)&&(p_i2>=1))))))))) * !(E(TRUE U (((((((((((initialize>=1)&&(r_stopped>=1))||(r_moving>=1))||(p_rdy>=1))||((off>=1)&&(r_active>=1)))||((initialized>=1)&&(p_i2>=1)))||(p_sc>=1))||((moved>=1)&&(p_m>=1)))||(p_rel>=1))||((p_rdy>=1)&&(access>=1)))||(p_i1>=1)))))] != FALSE + [((EY(Init) * EG((EX(((((((initialized>=1)&&(p_i2>=1))||((p_rdy>=1)&&(access>=1)))||(r_moving>=1))||((initialized>=1)&&(p_i2>=1)))||(p_rdy>=1))) + !(EG(!(EX(((initialized>=1)&&(p_i2>=1))))))))) * !(E(TRUE U !(E(TRUE U !((((((((((move>=1)&&(r_active>=1))||((off>=1)&&(r_active>=1)))||((initialized>=1)&&(p_i2>=1)))||(p_sc>=1))||(p_rel>=1))||((p_rdy>=1)&&(access>=1)))||((moved>=1)&&(p_m>=1)))||(p_i1>=1))))))))] != FALSE) + ((((([(EY(((EY(Init) * EG((EX(((((((initialized>=1)&&(p_i2>=1))||((p_rdy>=1)&&(access>=1)))||(r_moving>=1))||((initialized>=1)&&(p_i2>=1)))||(p_rdy>=1))) + !(EG(!(EX(((initialized>=1)&&(p_i2>=1))))))))) * (E(TRUE U (((initialized>=1)&&(p_i2>=1))&&((((((((initialize>=1)&&(r_stopped>=1))||((move>=1)&&(r_active>=1)))||(r_moving>=1))||((initialized>=1)&&(p_i2>=1)))||(p_rdy>=1))||((off>=1)&&(r_active>=1)))||(p_rel>=1)))) * !((E(!(((((((r_moving>=1)||(p_sc>=1))||((move>=1)&&(r_active>=1)))||(p_rdy>=1))||(p_sc>=1))||((moved>=1)&&(p_m>=1)))) U (!(!(EG(!((((((((off>=1)&&(r_active>=1))||(p_rdy>=1))||((p_rdy>=1)&&(access>=1)))||(p_rel>=1))||((moved>=1)&&(p_m>=1)))||(p_i1>=1)))))) * !(((((((r_moving>=1)||(p_sc>=1))||((move>=1)&&(r_active>=1)))||(p_rdy>=1))||(p_sc>=1))||((moved>=1)&&(p_m>=1)))))) + EG(!(((((((r_moving>=1)||(p_sc>=1))||((move>=1)&&(r_active>=1)))||(p_rdy>=1))||(p_sc>=1))||((moved>=1)&&(p_m>=1)))))))))) * !(EX(!(((((((((((initialize>=1)&&(r_stopped>=1))||(r_moving>=1))||(p_rdy>=1))||((initialized>=1)&&(p_i2>=1)))||(p_sc>=1))||(p_rel>=1))||((p_rdy>=1)&&(access>=1)))||((moved>=1)&&(p_m>=1)))||(p_i1>=1))))))] != FALSE + [(((EY(Init) * EG((EX(((((((initialized>=1)&&(p_i2>=1))||((p_rdy>=1)&&(access>=1)))||(r_moving>=1))||((initialized>=1)&&(p_i2>=1)))||(p_rdy>=1))) + !(EG(!(EX(((initialized>=1)&&(p_i2>=1))))))))) * (E(TRUE U (((initialized>=1)&&(p_i2>=1))&&((((((((initialize>=1)&&(r_stopped>=1))||((move>=1)&&(r_active>=1)))||(r_moving>=1))||((initialized>=1)&&(p_i2>=1)))||(p_rdy>=1))||((off>=1)&&(r_active>=1)))||(p_rel>=1)))) * !((E(!(((((((r_moving>=1)||(p_sc>=1))||((move>=1)&&(r_active>=1)))||(p_rdy>=1))||(p_sc>=1))||((moved>=1)&&(p_m>=1)))) U (!(!(EG(!((((((((off>=1)&&(r_active>=1))||(p_rdy>=1))||((p_rdy>=1)&&(access>=1)))||(p_rel>=1))||((moved>=1)&&(p_m>=1)))||(p_i1>=1)))))) * !(((((((r_moving>=1)||(p_sc>=1))||((move>=1)&&(r_active>=1)))||(p_rdy>=1))||(p_sc>=1))||((moved>=1)&&(p_m>=1)))))) + EG(!(((((((r_moving>=1)||(p_sc>=1))||((move>=1)&&(r_active>=1)))||(p_rdy>=1))||(p_sc>=1))||((moved>=1)&&(p_m>=1))))))))) * (r_moving>=1))] != FALSE) + [(((EY(Init) * EG((EX(((((((initialized>=1)&&(p_i2>=1))||((p_rdy>=1)&&(access>=1)))||(r_moving>=1))||((initialized>=1)&&(p_i2>=1)))||(p_rdy>=1))) + !(EG(!(EX(((initialized>=1)&&(p_i2>=1))))))))) * (E(TRUE U (((initialized>=1)&&(p_i2>=1))&&((((((((initialize>=1)&&(r_stopped>=1))||((move>=1)&&(r_active>=1)))||(r_moving>=1))||((initialized>=1)&&(p_i2>=1)))||(p_rdy>=1))||((off>=1)&&(r_active>=1)))||(p_rel>=1)))) * !((E(!(((((((r_moving>=1)||(p_sc>=1))||((move>=1)&&(r_active>=1)))||(p_rdy>=1))||(p_sc>=1))||((moved>=1)&&(p_m>=1)))) U (!(!(EG(!((((((((off>=1)&&(r_active>=1))||(p_rdy>=1))||((p_rdy>=1)&&(access>=1)))||(p_rel>=1))||((moved>=1)&&(p_m>=1)))||(p_i1>=1)))))) * !(((((((r_moving>=1)||(p_sc>=1))||((move>=1)&&(r_active>=1)))||(p_rdy>=1))||(p_sc>=1))||((moved>=1)&&(p_m>=1)))))) + EG(!(((((((r_moving>=1)||(p_sc>=1))||((move>=1)&&(r_active>=1)))||(p_rdy>=1))||(p_sc>=1))||((moved>=1)&&(p_m>=1))))))))) * (p_rdy>=1))] != FALSE) + [(((EY(Init) * EG((EX(((((((initialized>=1)&&(p_i2>=1))||((p_rdy>=1)&&(access>=1)))||(r_moving>=1))||((initialized>=1)&&(p_i2>=1)))||(p_rdy>=1))) + !(EG(!(EX(((initialized>=1)&&(p_i2>=1))))))))) * (E(TRUE U (((initialized>=1)&&(p_i2>=1))&&((((((((initialize>=1)&&(r_stopped>=1))||((move>=1)&&(r_active>=1)))||(r_moving>=1))||((initialized>=1)&&(p_i2>=1)))||(p_rdy>=1))||((off>=1)&&(r_active>=1)))||(p_rel>=1)))) * !((E(!(((((((r_moving>=1)||(p_sc>=1))||((move>=1)&&(r_active>=1)))||(p_rdy>=1))||(p_sc>=1))||((moved>=1)&&(p_m>=1)))) U (!(!(EG(!((((((((off>=1)&&(r_active>=1))||(p_rdy>=1))||((p_rdy>=1)&&(access>=1)))||(p_rel>=1))||((moved>=1)&&(p_m>=1)))||(p_i1>=1)))))) * !(((((((r_moving>=1)||(p_sc>=1))||((move>=1)&&(r_active>=1)))||(p_rdy>=1))||(p_sc>=1))||((moved>=1)&&(p_m>=1)))))) + EG(!(((((((r_moving>=1)||(p_sc>=1))||((move>=1)&&(r_active>=1)))||(p_rdy>=1))||(p_sc>=1))||((moved>=1)&&(p_m>=1))))))))) * (p_rel>=1))] != FALSE) + [(((EY(Init) * EG((EX(((((((initialized>=1)&&(p_i2>=1))||((p_rdy>=1)&&(access>=1)))||(r_moving>=1))||((initialized>=1)&&(p_i2>=1)))||(p_rdy>=1))) + !(EG(!(EX(((initialized>=1)&&(p_i2>=1))))))))) * (E(TRUE U (((initialized>=1)&&(p_i2>=1))&&((((((((initialize>=1)&&(r_stopped>=1))||((move>=1)&&(r_active>=1)))||(r_moving>=1))||((initialized>=1)&&(p_i2>=1)))||(p_rdy>=1))||((off>=1)&&(r_active>=1)))||(p_rel>=1)))) * !((E(!(((((((r_moving>=1)||(p_sc>=1))||((move>=1)&&(r_active>=1)))||(p_rdy>=1))||(p_sc>=1))||((moved>=1)&&(p_m>=1)))) U (!(!(EG(!((((((((off>=1)&&(r_active>=1))||(p_rdy>=1))||((p_rdy>=1)&&(access>=1)))||(p_rel>=1))||((moved>=1)&&(p_m>=1)))||(p_i1>=1)))))) * !(((((((r_moving>=1)||(p_sc>=1))||((move>=1)&&(r_active>=1)))||(p_rdy>=1))||(p_sc>=1))||((moved>=1)&&(p_m>=1)))))) + EG(!(((((((r_moving>=1)||(p_sc>=1))||((move>=1)&&(r_active>=1)))||(p_rdy>=1))||(p_sc>=1))||((moved>=1)&&(p_m>=1))))))))) * ((off>=1)&&(r_active>=1)))] != FALSE) + [(((EY(Init) * EG((EX(((((((initialized>=1)&&(p_i2>=1))||((p_rdy>=1)&&(access>=1)))||(r_moving>=1))||((initialized>=1)&&(p_i2>=1)))||(p_rdy>=1))) + !(EG(!(EX(((initialized>=1)&&(p_i2>=1))))))))) * (E(TRUE U (((initialized>=1)&&(p_i2>=1))&&((((((((initialize>=1)&&(r_stopped>=1))||((move>=1)&&(r_active>=1)))||(r_moving>=1))||((initialized>=1)&&(p_i2>=1)))||(p_rdy>=1))||((off>=1)&&(r_active>=1)))||(p_rel>=1)))) * !((E(!(((((((r_moving>=1)||(p_sc>=1))||((move>=1)&&(r_active>=1)))||(p_rdy>=1))||(p_sc>=1))||((moved>=1)&&(p_m>=1)))) U (!(!(EG(!((((((((off>=1)&&(r_active>=1))||(p_rdy>=1))||((p_rdy>=1)&&(access>=1)))||(p_rel>=1))||((moved>=1)&&(p_m>=1)))||(p_i1>=1)))))) * !(((((((r_moving>=1)||(p_sc>=1))||((move>=1)&&(r_active>=1)))||(p_rdy>=1))||(p_sc>=1))||((moved>=1)&&(p_m>=1)))))) + EG(!(((((((r_moving>=1)||(p_sc>=1))||((move>=1)&&(r_active>=1)))||(p_rdy>=1))||(p_sc>=1))||((moved>=1)&&(p_m>=1))))))))) * ((initialized>=1)&&(p_i2>=1)))] != FALSE))
Using saturation style SCC detection
Using saturation style SCC detection
(forward)formula 8,1,455.675,3402080,1,0,322,1.90001e+07,10,198,856,2.34146e+07,3
FORMULA RobotManipulation-PT-00020-CTLFireability-09 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: AG(EF(((((p_rdy<1) * (!(AF(((((((((((initialize>=1)&&(r_stopped>=1))||((move>=1)&&(r_active>=1)))||(r_moving>=1))||(p_rdy>=1))||((off>=1)&&(r_active>=1)))||(p_sc>=1))||((moved>=1)&&(p_m>=1)))||((p_rdy>=1)&&(access>=1)))||(p_rel>=1)))) + ((((((((r_moving>=1)||(p_rdy>=1))||(p_sc>=1))||(p_i1>=1))||((move>=1)&&(r_active>=1)))||((off>=1)&&(r_active>=1)))||((moved>=1)&&(p_m>=1)))&&((((((p_sc<1)&&(p_rel<1))&&(p_i1<1))&&((move<1)||(r_active<1)))&&((off<1)||(r_active<1)))||((((p_sc<1)&&(p_rel<1))&&((move<1)||(r_active<1)))&&((initialized<1)||(p_i2<1))))))) * ((initialize<1)||(r_stopped<1))) * ((off<1)||(r_active<1)))))
=> equivalent forward existential formula: [(FwdU(Init,TRUE) * !(E(TRUE U ((((p_rdy<1) * (!(!(EG(!(((((((((((initialize>=1)&&(r_stopped>=1))||((move>=1)&&(r_active>=1)))||(r_moving>=1))||(p_rdy>=1))||((off>=1)&&(r_active>=1)))||(p_sc>=1))||((moved>=1)&&(p_m>=1)))||((p_rdy>=1)&&(access>=1)))||(p_rel>=1)))))) + ((((((((r_moving>=1)||(p_rdy>=1))||(p_sc>=1))||(p_i1>=1))||((move>=1)&&(r_active>=1)))||((off>=1)&&(r_active>=1)))||((moved>=1)&&(p_m>=1)))&&((((((p_sc<1)&&(p_rel<1))&&(p_i1<1))&&((move<1)||(r_active<1)))&&((off<1)||(r_active<1)))||((((p_sc<1)&&(p_rel<1))&&((move<1)||(r_active<1)))&&((initialized<1)||(p_i2<1))))))) * ((initialize<1)||(r_stopped<1))) * ((off<1)||(r_active<1))))))] = FALSE
(forward)formula 9,1,492.544,3402080,1,0,322,1.90001e+07,26,198,924,2.34146e+07,10
FORMULA RobotManipulation-PT-00020-CTLFireability-11 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: AG(AX(EG((A(((((((((((initialize>=1)&&(r_stopped>=1))||((move>=1)&&(r_active>=1)))||(p_rdy>=1))||((off>=1)&&(r_active>=1)))||(p_sc>=1))||((moved>=1)&&(p_m>=1)))||((p_rdy>=1)&&(access>=1)))||(p_rel>=1))||(p_i1>=1)) U ((p_rdy>=1)||(p_sc>=1))) * ((((((((r_moving>=1)||(p_rdy>=1))||(p_sc>=1))||(p_i1>=1))||((initialize>=1)&&(r_stopped>=1)))||((initialized>=1)&&(p_i2>=1)))||((off>=1)&&(r_active>=1)))||((moved>=1)&&(p_m>=1)))))))
=> equivalent forward existential formula: [(EY(FwdU(Init,TRUE)) * !(EG((!((E(!(((p_rdy>=1)||(p_sc>=1))) U (!(((((((((((initialize>=1)&&(r_stopped>=1))||((move>=1)&&(r_active>=1)))||(p_rdy>=1))||((off>=1)&&(r_active>=1)))||(p_sc>=1))||((moved>=1)&&(p_m>=1)))||((p_rdy>=1)&&(access>=1)))||(p_rel>=1))||(p_i1>=1))) * !(((p_rdy>=1)||(p_sc>=1))))) + EG(!(((p_rdy>=1)||(p_sc>=1)))))) * ((((((((r_moving>=1)||(p_rdy>=1))||(p_sc>=1))||(p_i1>=1))||((initialize>=1)&&(r_stopped>=1)))||((initialized>=1)&&(p_i2>=1)))||((off>=1)&&(r_active>=1)))||((moved>=1)&&(p_m>=1)))))))] = FALSE
Hit Full ! (commute/partial/dont) 6/4/5
Using saturation style SCC detection
(forward)formula 10,0,561.722,3402080,1,0,322,1.90001e+07,43,198,977,2.34146e+07,17
FORMULA RobotManipulation-PT-00020-CTLFireability-12 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is FALSE !
***************************************
original formula: (!(E(!(AX((((((move>=1)&&(r_active>=1))||((initialized>=1)&&(p_i2>=1)))||(p_rel>=1))||((p_rdy>=1)&&(access>=1))))) U E(AX(((((((initialize>=1)&&(r_stopped>=1))||(r_moving>=1))||((initialized>=1)&&(p_i2>=1)))||(p_sc>=1))||(p_rel>=1))) U EX(((p_rdy>=1)||(p_rel>=1)))))) + EF(AG(!(A(((initialize>=1)&&(r_stopped>=1)) U (((move>=1)&&(r_active>=1))||(p_rdy>=1)))))))
=> equivalent forward existential formula: [(EY(FwdU(FwdU((Init * !(E(TRUE U !(E(TRUE U !(!(!((E(!((((move>=1)&&(r_active>=1))||(p_rdy>=1))) U (!(((initialize>=1)&&(r_stopped>=1))) * !((((move>=1)&&(r_active>=1))||(p_rdy>=1))))) + EG(!((((move>=1)&&(r_active>=1))||(p_rdy>=1))))))))))))),!(!(EX(!((((((move>=1)&&(r_active>=1))||((initialized>=1)&&(p_i2>=1)))||(p_rel>=1))||((p_rdy>=1)&&(access>=1)))))))),!(EX(!(((((((initialize>=1)&&(r_stopped>=1))||(r_moving>=1))||((initialized>=1)&&(p_i2>=1)))||(p_sc>=1))||(p_rel>=1))))))) * ((p_rdy>=1)||(p_rel>=1)))] = FALSE
Hit Full ! (commute/partial/dont) 2/5/9
Detected timeout of ITS tools.
[2021-05-14 00:52:49] [INFO ] Flatten gal took : 4 ms
[2021-05-14 00:52:49] [INFO ] Input system was already deterministic with 11 transitions.
[2021-05-14 00:52:49] [INFO ] Transformed 15 places.
[2021-05-14 00:52:49] [INFO ] Transformed 11 transitions.
Running greatSPN : CommandLine [args=[/home/mcc/BenchKit/bin//..//greatspn//bin/pinvar, /home/mcc/execution/gspn], workingDir=/home/mcc/execution]
Run of greatSPN captured in /home/mcc/execution/outPut.txt
Running greatSPN : CommandLine [args=[/home/mcc/BenchKit/bin//..//greatspn//bin/RGMEDD2, /home/mcc/execution/gspn, -META, -varord-only], workingDir=/home/mcc/execution]
Run of greatSPN captured in /home/mcc/execution/outPut.txt
Using order generated by GreatSPN with heuristic : META
[2021-05-14 00:52:49] [INFO ] Time to serialize gal into /tmp/CTLFireability10566860142158685386.gal : 1 ms
[2021-05-14 00:52:49] [INFO ] Time to serialize properties into /tmp/CTLFireability15026124464222855616.ctl : 1 ms
Invoking ITS tools like this :CommandLine [args=[/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.202104292328/bin/its-ctl-linux64, --gc-threshold, 2000000, --quiet, -i, /tmp/CTLFireability10566860142158685386.gal, -t, CGAL, -ctl, /tmp/CTLFireability15026124464222855616.ctl, --load-order, /home/mcc/execution/model.ord, --gen-order, FOLLOW], workingDir=/home/mcc/execution]
its-ctl command run as :
/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.202104292328/bin/its-ctl-linux64 --gc-threshold 2000000 --quiet -i /tmp/CTLFireability10566860142158685386.gal -t CGAL -ctl /tmp/CTLFireability15026124464222855616.ctl --load-order /home/mcc/execution/model.ord --gen-order FOLLOW
Successfully loaded order from file /home/mcc/execution/model.ord
No direction supplied, using forward translation only.
Parsed 1 CTL formulae.
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
reachable,4.10891e+09,16.6058,243296,2,72122,5,1.46879e+06,6,0,74,1.54916e+06,0
Converting to forward existential form...Done !
original formula: (!(E(!(AX((((((move>=1)&&(r_active>=1))||((initialized>=1)&&(p_i2>=1)))||(p_rel>=1))||((p_rdy>=1)&&(access>=1))))) U E(AX(((((((initialize>=1)&&(r_stopped>=1))||(r_moving>=1))||((initialized>=1)&&(p_i2>=1)))||(p_sc>=1))||(p_rel>=1))) U EX(((p_rdy>=1)||(p_rel>=1)))))) + EF(AG(!(A(((initialize>=1)&&(r_stopped>=1)) U (((move>=1)&&(r_active>=1))||(p_rdy>=1)))))))
=> equivalent forward existential formula: [(EY(FwdU(FwdU((Init * !(E(TRUE U !(E(TRUE U !(!(!((E(!((((move>=1)&&(r_active>=1))||(p_rdy>=1))) U (!(((initialize>=1)&&(r_stopped>=1))) * !((((move>=1)&&(r_active>=1))||(p_rdy>=1))))) + EG(!((((move>=1)&&(r_active>=1))||(p_rdy>=1))))))))))))),!(!(EX(!((((((move>=1)&&(r_active>=1))||((initialized>=1)&&(p_i2>=1)))||(p_rel>=1))||((p_rdy>=1)&&(access>=1)))))))),!(EX(!(((((((initialize>=1)&&(r_stopped>=1))||(r_moving>=1))||((initialized>=1)&&(p_i2>=1)))||(p_sc>=1))||(p_rel>=1))))))) * ((p_rdy>=1)||(p_rel>=1)))] = FALSE
Reverse transition relation is exact ! Faster fixpoint algorithm enabled.
Hit Full ! (commute/partial/dont) 2/9/9
(forward)formula 0,0,788.362,3042624,1,0,388,1.6534e+07,10,253,798,2.11765e+07,380
FORMULA RobotManipulation-PT-00020-CTLFireability-13 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is FALSE !
***************************************
BK_STOP 1620954359788
--------------------
content from stderr:
+ export BINDIR=/home/mcc/BenchKit/bin//../
+ BINDIR=/home/mcc/BenchKit/bin//../
++ pwd
+ export MODEL=/home/mcc/execution
+ MODEL=/home/mcc/execution
+ [[ CTLFireability = StateSpace ]]
+ /home/mcc/BenchKit/bin//..//runeclipse.sh /home/mcc/execution CTLFireability -its -ltsmin -greatspnpath /home/mcc/BenchKit/bin//..//greatspn/ -order META -manyOrder -smt -timeout 3600
+ ulimit -s 65536
+ [[ -z '' ]]
+ export LTSMIN_MEM_SIZE=8589934592
+ LTSMIN_MEM_SIZE=8589934592
++ cut -d . -f 9
++ ls /home/mcc/BenchKit/bin//..//itstools/plugins/fr.lip6.move.gal.application.pnmcc_1.0.0.202104292328.jar
+ VERSION=0
+ echo 'Running Version 0'
+ /home/mcc/BenchKit/bin//..//itstools/its-tools -data /home/mcc/execution/workspace -pnfolder /home/mcc/execution -examination CTLFireability -spotpath /home/mcc/BenchKit/bin//..//ltlfilt -z3path /home/mcc/BenchKit/bin//..//z3/bin/z3 -yices2path /home/mcc/BenchKit/bin//..//yices/bin/yices -its -ltsmin -greatspnpath /home/mcc/BenchKit/bin//..//greatspn/ -order META -manyOrder -smt -timeout 3600 -vmargs -Dosgi.locking=none -Declipse.stateSaveDelayInterval=-1 -Dosgi.configuration.area=/tmp/.eclipse -Xss128m -Xms40m -Xmx16000m
Sequence of Actions to be Executed by the VM
This is useful if one wants to reexecute the tool in the VM from the submitted image disk.
set -x
# this is for BenchKit: configuration of major elements for the test
export BK_INPUT="RobotManipulation-PT-00020"
export BK_EXAMINATION="CTLFireability"
export BK_TOOL="itstools"
export BK_RESULT_DIR="/tmp/BK_RESULTS/OUTPUTS"
export BK_TIME_CONFINEMENT="3600"
export BK_MEMORY_CONFINEMENT="16384"
export BK_BIN_PATH="/home/mcc/BenchKit/bin/"
# this is specific to your benchmark or test
export BIN_DIR="$HOME/BenchKit/bin"
# remove the execution directoty if it exists (to avoid increse of .vmdk images)
if [ -d execution ] ; then
rm -rf execution
fi
# this is for BenchKit: explicit launching of the test
echo "====================================================================="
echo " Generated by BenchKit 2-4028"
echo " Executing tool itstools"
echo " Input is RobotManipulation-PT-00020, examination is CTLFireability"
echo " Time confinement is $BK_TIME_CONFINEMENT seconds"
echo " Memory confinement is 16384 MBytes"
echo " Number of cores is 4"
echo " Run identifier is r197-smll-162089451800042"
echo "====================================================================="
echo
echo "--------------------"
echo "preparation of the directory to be used:"
tar xzf /home/mcc/BenchKit/INPUTS/RobotManipulation-PT-00020.tgz
mv RobotManipulation-PT-00020 execution
cd execution
if [ "CTLFireability" = "ReachabilityDeadlock" ] || [ "CTLFireability" = "UpperBounds" ] || [ "CTLFireability" = "QuasiLiveness" ] || [ "CTLFireability" = "StableMarking" ] || [ "CTLFireability" = "Liveness" ] || [ "CTLFireability" = "OneSafe" ] || [ "CTLFireability" = "StateSpace" ]; then
rm -f GenericPropertiesVerdict.xml
fi
pwd
ls -lh
echo
echo "--------------------"
echo "content from stdout:"
echo
echo "=== Data for post analysis generated by BenchKit (invocation template)"
echo
if [ "CTLFireability" = "UpperBounds" ] ; then
echo "The expected result is a vector of positive values"
echo NUM_VECTOR
elif [ "CTLFireability" != "StateSpace" ] ; then
echo "The expected result is a vector of booleans"
echo BOOL_VECTOR
else
echo "no data necessary for post analysis"
fi
echo
if [ -f "CTLFireability.txt" ] ; then
echo "here is the order used to build the result vector(from text file)"
for x in $(grep Property CTLFireability.txt | cut -d ' ' -f 2 | sort -u) ; do
echo "FORMULA_NAME $x"
done
elif [ -f "CTLFireability.xml" ] ; then # for cunf (txt files deleted;-)
echo echo "here is the order used to build the result vector(from xml file)"
for x in $(grep '
echo "FORMULA_NAME $x"
done
elif [ "CTLFireability" = "ReachabilityDeadlock" ] || [ "CTLFireability" = "QuasiLiveness" ] || [ "CTLFireability" = "StableMarking" ] || [ "CTLFireability" = "Liveness" ] || [ "CTLFireability" = "OneSafe" ] ; then
echo "FORMULA_NAME CTLFireability"
fi
echo
echo "=== Now, execution of the tool begins"
echo
echo -n "BK_START "
date -u +%s%3N
echo
timeout -s 9 $BK_TIME_CONFINEMENT bash -c "/home/mcc/BenchKit/BenchKit_head.sh 2> STDERR ; echo ; echo -n \"BK_STOP \" ; date -u +%s%3N"
if [ $? -eq 137 ] ; then
echo
echo "BK_TIME_CONFINEMENT_REACHED"
fi
echo
echo "--------------------"
echo "content from stderr:"
echo
cat STDERR ;