
About the Execution of ITS-Tools for ParamProductionCell-PT-3
| Execution Summary | |||||
| Max Memory Used (MB) |
Time wait (ms) | CPU Usage (ms) | I/O Wait (ms) | Computed Result | Execution Status |
| 1276.399 | 137163.00 | 147659.00 | 612.90 | TFTTTFFTFTFTFTFF | normal |
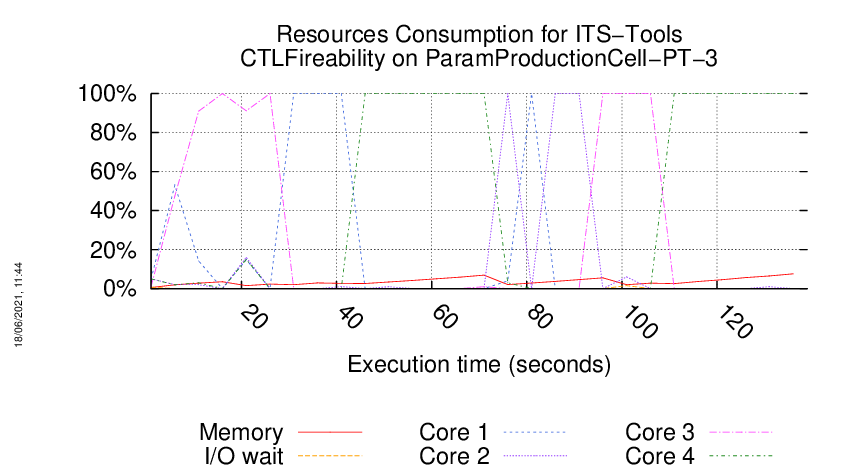
Execution Chart
We display below the execution chart for this examination (boot time has been removed).
Trace from the execution
Formatting '/data/fkordon/mcc2021-input.r140-tall-162089127800386.qcow2', fmt=qcow2 size=4294967296 backing_file='/data/fkordon/mcc2021-input.qcow2' encryption=off cluster_size=65536 lazy_refcounts=off
Waiting for the VM to be ready (probing ssh)
...................
=====================================================================
Generated by BenchKit 2-4028
Executing tool itstools
Input is ParamProductionCell-PT-3, examination is CTLFireability
Time confinement is 3600 seconds
Memory confinement is 16384 MBytes
Number of cores is 4
Run identifier is r140-tall-162089127800386
=====================================================================
--------------------
preparation of the directory to be used:
/home/mcc/execution
total 528K
-rw-r--r-- 1 mcc users 16K May 5 16:58 CTLCardinality.txt
-rw-r--r-- 1 mcc users 94K May 10 09:43 CTLCardinality.xml
-rw-r--r-- 1 mcc users 15K May 5 16:58 CTLFireability.txt
-rw-r--r-- 1 mcc users 84K May 10 09:43 CTLFireability.xml
-rw-r--r-- 1 mcc users 4.2K May 6 14:48 GenericPropertiesDefinition.xml
-rw-r--r-- 1 mcc users 6.2K May 6 14:48 GenericPropertiesVerdict.xml
-rw-r--r-- 1 mcc users 3.7K Mar 28 16:23 LTLCardinality.txt
-rw-r--r-- 1 mcc users 23K Mar 28 16:23 LTLCardinality.xml
-rw-r--r-- 1 mcc users 2.7K Mar 28 16:23 LTLFireability.txt
-rw-r--r-- 1 mcc users 18K Mar 28 16:23 LTLFireability.xml
-rw-r--r-- 1 mcc users 4.5K Mar 27 06:35 ReachabilityCardinality.txt
-rw-r--r-- 1 mcc users 21K Mar 27 06:35 ReachabilityCardinality.xml
-rw-r--r-- 1 mcc users 3.3K Mar 25 07:55 ReachabilityFireability.txt
-rw-r--r-- 1 mcc users 16K Mar 25 07:55 ReachabilityFireability.xml
-rw-r--r-- 1 mcc users 1.9K Mar 22 09:15 UpperBounds.txt
-rw-r--r-- 1 mcc users 3.9K Mar 22 09:15 UpperBounds.xml
-rw-r--r-- 1 mcc users 6 May 5 16:51 equiv_col
-rw-r--r-- 1 mcc users 2 May 5 16:51 instance
-rw-r--r-- 1 mcc users 6 May 5 16:51 iscolored
-rw-r--r-- 1 mcc users 174K May 5 16:51 model.pnml
--------------------
content from stdout:
=== Data for post analysis generated by BenchKit (invocation template)
The expected result is a vector of booleans
BOOL_VECTOR
here is the order used to build the result vector(from text file)
FORMULA_NAME ParamProductionCell-PT-3-CTLFireability-00
FORMULA_NAME ParamProductionCell-PT-3-CTLFireability-01
FORMULA_NAME ParamProductionCell-PT-3-CTLFireability-02
FORMULA_NAME ParamProductionCell-PT-3-CTLFireability-03
FORMULA_NAME ParamProductionCell-PT-3-CTLFireability-04
FORMULA_NAME ParamProductionCell-PT-3-CTLFireability-05
FORMULA_NAME ParamProductionCell-PT-3-CTLFireability-06
FORMULA_NAME ParamProductionCell-PT-3-CTLFireability-07
FORMULA_NAME ParamProductionCell-PT-3-CTLFireability-08
FORMULA_NAME ParamProductionCell-PT-3-CTLFireability-09
FORMULA_NAME ParamProductionCell-PT-3-CTLFireability-10
FORMULA_NAME ParamProductionCell-PT-3-CTLFireability-11
FORMULA_NAME ParamProductionCell-PT-3-CTLFireability-12
FORMULA_NAME ParamProductionCell-PT-3-CTLFireability-13
FORMULA_NAME ParamProductionCell-PT-3-CTLFireability-14
FORMULA_NAME ParamProductionCell-PT-3-CTLFireability-15
=== Now, execution of the tool begins
BK_START 1620979821557
Running Version 0
[2021-05-14 08:10:23] [INFO ] Running its-tools with arguments : [-pnfolder, /home/mcc/execution, -examination, CTLFireability, -spotpath, /home/mcc/BenchKit/bin//..//ltlfilt, -z3path, /home/mcc/BenchKit/bin//..//z3/bin/z3, -yices2path, /home/mcc/BenchKit/bin//..//yices/bin/yices, -its, -ltsmin, -greatspnpath, /home/mcc/BenchKit/bin//..//greatspn/, -order, META, -manyOrder, -smt, -timeout, 3600]
[2021-05-14 08:10:23] [INFO ] Parsing pnml file : /home/mcc/execution/model.pnml
[2021-05-14 08:10:23] [INFO ] Load time of PNML (sax parser for PT used): 67 ms
[2021-05-14 08:10:23] [INFO ] Transformed 231 places.
[2021-05-14 08:10:23] [INFO ] Transformed 202 transitions.
[2021-05-14 08:10:23] [INFO ] Found NUPN structural information;
[2021-05-14 08:10:23] [INFO ] Parsed PT model containing 231 places and 202 transitions in 108 ms.
Parsed 16 properties from file /home/mcc/execution/CTLFireability.xml in 12 ms.
Support contains 228 out of 231 places. Attempting structural reductions.
Starting structural reductions, iteration 0 : 231/231 places, 202/202 transitions.
Applied a total of 0 rules in 15 ms. Remains 231 /231 variables (removed 0) and now considering 202/202 (removed 0) transitions.
// Phase 1: matrix 202 rows 231 cols
[2021-05-14 08:10:23] [INFO ] Computed 59 place invariants in 22 ms
[2021-05-14 08:10:23] [INFO ] Implicit Places using invariants in 196 ms returned []
// Phase 1: matrix 202 rows 231 cols
[2021-05-14 08:10:23] [INFO ] Computed 59 place invariants in 15 ms
[2021-05-14 08:10:23] [INFO ] State equation strengthened by 68 read => feed constraints.
[2021-05-14 08:10:23] [INFO ] Implicit Places using invariants and state equation in 189 ms returned []
Implicit Place search using SMT with State Equation took 410 ms to find 0 implicit places.
// Phase 1: matrix 202 rows 231 cols
[2021-05-14 08:10:23] [INFO ] Computed 59 place invariants in 17 ms
[2021-05-14 08:10:23] [INFO ] Dead Transitions using invariants and state equation in 167 ms returned []
Finished structural reductions, in 1 iterations. Remains : 231/231 places, 202/202 transitions.
[2021-05-14 08:10:24] [INFO ] Flatten gal took : 55 ms
[2021-05-14 08:10:24] [INFO ] Flatten gal took : 24 ms
[2021-05-14 08:10:24] [INFO ] Input system was already deterministic with 202 transitions.
Finished random walk after 16069 steps, including 0 resets, run visited all 75 properties in 100 ms. (steps per millisecond=160 )
Performed 14 Pre agglomeration using Quasi-Persistent + Divergent Free condition..
Pre-agglomeration after 0 with 14 Pre rules applied. Total rules applied 0 place count 231 transition count 188
Deduced a syphon composed of 14 places in 0 ms
Reduce places removed 14 places and 0 transitions.
Iterating global reduction 0 with 28 rules applied. Total rules applied 28 place count 217 transition count 188
Discarding 6 places :
Symmetric choice reduction at 0 with 6 rule applications. Total rules 34 place count 211 transition count 182
Iterating global reduction 0 with 6 rules applied. Total rules applied 40 place count 211 transition count 182
Performed 18 Post agglomeration using F-continuation condition.Transition count delta: 18
Deduced a syphon composed of 18 places in 1 ms
Reduce places removed 18 places and 0 transitions.
Iterating global reduction 0 with 36 rules applied. Total rules applied 76 place count 193 transition count 164
Applied a total of 76 rules in 62 ms. Remains 193 /231 variables (removed 38) and now considering 164/202 (removed 38) transitions.
[2021-05-14 08:10:24] [INFO ] Flatten gal took : 11 ms
[2021-05-14 08:10:24] [INFO ] Flatten gal took : 11 ms
[2021-05-14 08:10:24] [INFO ] Input system was already deterministic with 164 transitions.
[2021-05-14 08:10:24] [INFO ] Flatten gal took : 11 ms
[2021-05-14 08:10:24] [INFO ] Flatten gal took : 11 ms
[2021-05-14 08:10:24] [INFO ] Time to serialize gal into /tmp/CTLFireability14061320323292239754.gal : 6 ms
[2021-05-14 08:10:24] [INFO ] Time to serialize properties into /tmp/CTLFireability15924612295820908272.ctl : 0 ms
Invoking ITS tools like this :CommandLine [args=[/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.202104292328/bin/its-ctl-linux64, --gc-threshold, 2000000, --quiet, -i, /tmp/CTLFireability14061320323292239754.gal, -t, CGAL, -ctl, /tmp/CTLFireability15924612295820908272.ctl, --gen-order, FOLLOW], workingDir=/home/mcc/execution]
its-ctl command run as :
/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.202104292328/bin/its-ctl-linux64 --gc-threshold 2000000 --quiet -i /tmp/CTLFireability14061320323292239754.gal -t CGAL -ctl /tmp/CTLFireability15924612295820908272.ctl --gen-order FOLLOW
No direction supplied, using forward translation only.
Parsed 1 CTL formulae.
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
reachable,278863,0.397248,19040,2,9123,5,70826,6,0,939,54171,0
Converting to forward existential form...Done !
original formula: AG((((((EF(((A2U_in==1)&&(arm1_pick_up_angle==1))) + ((belt1_light_barrier_false==1)&&(FB_deliver_run==1))) + ((crane_pick_up_height==1)&&(CL_lower_run==1))) + ((robot_left==1)&&(A1U_rot3_rs==1))) + ((press_stop==1)&&(blank_forged==1))) + ((A2U_in==1)&&(arm1_pick_up_angle==1))))
=> equivalent forward existential formula: [((((((FwdU(Init,TRUE) * !(((A2U_in==1)&&(arm1_pick_up_angle==1)))) * !(((press_stop==1)&&(blank_forged==1)))) * !(((robot_left==1)&&(A1U_rot3_rs==1)))) * !(((crane_pick_up_height==1)&&(CL_lower_run==1)))) * !(((belt1_light_barrier_false==1)&&(FB_deliver_run==1)))) * !(E(TRUE U ((A2U_in==1)&&(arm1_pick_up_angle==1)))))] = FALSE
Reverse transition relation is NOT exact ! Due to transitions t1, t12, t15, t24, t30, t35, t36, t37, t39, t41, t43, t44, t49, t52, t58, t59, t61, t62, t65, t70, t73, t79, t80, t82, t83, t85, t86, t91, t94, t101, t103, t104, t106, t108, t113, t116, t121, t124, t134, t138, t140, t141, t142, t143, t144, t145, t150, t151, t158, t159, t160, t161, Intersection with reachable at each step enabled. (destroyed/reverse/intersect/total) :0/112/52/164
(forward)formula 0,1,16.1887,479320,1,0,477,3.0844e+06,349,267,6064,1.75441e+06,591
FORMULA ParamProductionCell-PT-3-CTLFireability-03 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
Performed 14 Pre agglomeration using Quasi-Persistent + Divergent Free condition..
Pre-agglomeration after 0 with 14 Pre rules applied. Total rules applied 0 place count 231 transition count 188
Deduced a syphon composed of 14 places in 1 ms
Reduce places removed 14 places and 0 transitions.
Iterating global reduction 0 with 28 rules applied. Total rules applied 28 place count 217 transition count 188
Discarding 5 places :
Symmetric choice reduction at 0 with 5 rule applications. Total rules 33 place count 212 transition count 183
Iterating global reduction 0 with 5 rules applied. Total rules applied 38 place count 212 transition count 183
Performed 18 Post agglomeration using F-continuation condition.Transition count delta: 18
Deduced a syphon composed of 18 places in 0 ms
Reduce places removed 18 places and 0 transitions.
Iterating global reduction 0 with 36 rules applied. Total rules applied 74 place count 194 transition count 165
Applied a total of 74 rules in 39 ms. Remains 194 /231 variables (removed 37) and now considering 165/202 (removed 37) transitions.
[2021-05-14 08:10:41] [INFO ] Flatten gal took : 10 ms
[2021-05-14 08:10:41] [INFO ] Flatten gal took : 11 ms
[2021-05-14 08:10:41] [INFO ] Input system was already deterministic with 165 transitions.
[2021-05-14 08:10:41] [INFO ] Flatten gal took : 10 ms
[2021-05-14 08:10:41] [INFO ] Flatten gal took : 10 ms
[2021-05-14 08:10:41] [INFO ] Time to serialize gal into /tmp/CTLFireability223437629168273472.gal : 2 ms
[2021-05-14 08:10:41] [INFO ] Time to serialize properties into /tmp/CTLFireability2731073084454510182.ctl : 1 ms
Invoking ITS tools like this :CommandLine [args=[/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.202104292328/bin/its-ctl-linux64, --gc-threshold, 2000000, --quiet, -i, /tmp/CTLFireability223437629168273472.gal, -t, CGAL, -ctl, /tmp/CTLFireability2731073084454510182.ctl, --gen-order, FOLLOW], workingDir=/home/mcc/execution]
its-ctl command run as :
/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.202104292328/bin/its-ctl-linux64 --gc-threshold 2000000 --quiet -i /tmp/CTLFireability223437629168273472.gal -t CGAL -ctl /tmp/CTLFireability2731073084454510182.ctl --gen-order FOLLOW
No direction supplied, using forward translation only.
Parsed 1 CTL formulae.
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
reachable,280158,0.470414,19784,2,9354,5,72753,6,0,944,56245,0
Converting to forward existential form...Done !
original formula: AF(!(A((((((crane_lift==1)&&(crane_pick_up_height==1))&&(CL_lift_run==1))||((arm1_forward==1)&&(A1L_ext_rs==1)))||((robot_right==1)&&(A2U_rot3_rs==1))) U !(AG(((((belt1_light_barrier_true==1)&&(FB_trans_run==1))||((robot_right==1)&&(A2U_rot1_rs==1)))||(((arm1_retract_ext==1)&&(arm1_forward==1))&&(A1U_ext_run==1))))))))
=> equivalent forward existential formula: [FwdG(Init,!(!(!((E(!(!(!(E(TRUE U !(((((belt1_light_barrier_true==1)&&(FB_trans_run==1))||((robot_right==1)&&(A2U_rot1_rs==1)))||(((arm1_retract_ext==1)&&(arm1_forward==1))&&(A1U_ext_run==1)))))))) U (!((((((crane_lift==1)&&(crane_pick_up_height==1))&&(CL_lift_run==1))||((arm1_forward==1)&&(A1L_ext_rs==1)))||((robot_right==1)&&(A2U_rot3_rs==1)))) * !(!(!(E(TRUE U !(((((belt1_light_barrier_true==1)&&(FB_trans_run==1))||((robot_right==1)&&(A2U_rot1_rs==1)))||(((arm1_retract_ext==1)&&(arm1_forward==1))&&(A1U_ext_run==1)))))))))) + EG(!(!(!(E(TRUE U !(((((belt1_light_barrier_true==1)&&(FB_trans_run==1))||((robot_right==1)&&(A2U_rot1_rs==1)))||(((arm1_retract_ext==1)&&(arm1_forward==1))&&(A1U_ext_run==1))))))))))))))] = FALSE
Reverse transition relation is NOT exact ! Due to transitions t1, t12, t15, t24, t30, t35, t37, t39, t41, t43, t45, t50, t53, t59, t60, t62, t63, t66, t71, t74, t80, t81, t83, t84, t86, t87, t92, t95, t102, t104, t105, t107, t109, t114, t117, t122, t125, t135, t139, t141, t142, t143, t144, t145, t146, t151, t152, t159, t160, t161, t162, Intersection with reachable at each step enabled. (destroyed/reverse/intersect/total) :0/114/51/165
(forward)formula 0,0,7.85046,199108,1,0,296,883641,363,171,6446,518402,348
FORMULA ParamProductionCell-PT-3-CTLFireability-05 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is FALSE !
***************************************
Performed 14 Pre agglomeration using Quasi-Persistent + Divergent Free condition..
Pre-agglomeration after 0 with 14 Pre rules applied. Total rules applied 0 place count 231 transition count 188
Deduced a syphon composed of 14 places in 1 ms
Reduce places removed 14 places and 0 transitions.
Iterating global reduction 0 with 28 rules applied. Total rules applied 28 place count 217 transition count 188
Discarding 6 places :
Symmetric choice reduction at 0 with 6 rule applications. Total rules 34 place count 211 transition count 182
Iterating global reduction 0 with 6 rules applied. Total rules applied 40 place count 211 transition count 182
Performed 17 Post agglomeration using F-continuation condition.Transition count delta: 17
Deduced a syphon composed of 17 places in 1 ms
Reduce places removed 17 places and 0 transitions.
Iterating global reduction 0 with 34 rules applied. Total rules applied 74 place count 194 transition count 165
Applied a total of 74 rules in 29 ms. Remains 194 /231 variables (removed 37) and now considering 165/202 (removed 37) transitions.
[2021-05-14 08:10:49] [INFO ] Flatten gal took : 8 ms
[2021-05-14 08:10:49] [INFO ] Flatten gal took : 9 ms
[2021-05-14 08:10:49] [INFO ] Input system was already deterministic with 165 transitions.
[2021-05-14 08:10:49] [INFO ] Flatten gal took : 9 ms
[2021-05-14 08:10:49] [INFO ] Flatten gal took : 9 ms
[2021-05-14 08:10:49] [INFO ] Time to serialize gal into /tmp/CTLFireability13247637635093162869.gal : 2 ms
[2021-05-14 08:10:49] [INFO ] Time to serialize properties into /tmp/CTLFireability12471265689703117647.ctl : 1 ms
Invoking ITS tools like this :CommandLine [args=[/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.202104292328/bin/its-ctl-linux64, --gc-threshold, 2000000, --quiet, -i, /tmp/CTLFireability13247637635093162869.gal, -t, CGAL, -ctl, /tmp/CTLFireability12471265689703117647.ctl, --gen-order, FOLLOW], workingDir=/home/mcc/execution]
its-ctl command run as :
/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.202104292328/bin/its-ctl-linux64 --gc-threshold 2000000 --quiet -i /tmp/CTLFireability13247637635093162869.gal -t CGAL -ctl /tmp/CTLFireability12471265689703117647.ctl --gen-order FOLLOW
No direction supplied, using forward translation only.
Parsed 1 CTL formulae.
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
reachable,281031,0.430577,19644,2,9137,5,71634,6,0,944,56677,0
Converting to forward existential form...Done !
original formula: AG(EF(((((A1U_out==1)||((arm2_stop==1)&&(A2L_loaded==1)))||((press_stop==1)&&(blank_forged==1)))||(((arm2_retract_ext==1)&&(arm2_forward==1))&&(A2L_ext_run==1)))))
=> equivalent forward existential formula: [(FwdU(Init,TRUE) * !(E(TRUE U ((((A1U_out==1)||((arm2_stop==1)&&(A2L_loaded==1)))||((press_stop==1)&&(blank_forged==1)))||(((arm2_retract_ext==1)&&(arm2_forward==1))&&(A2L_ext_run==1))))))] = FALSE
Reverse transition relation is NOT exact ! Due to transitions t1, t12, t15, t24, t30, t35, t36, t37, t39, t41, t43, t44, t49, t52, t58, t59, t61, t62, t65, t70, t73, t79, t80, t82, t83, t85, t86, t91, t94, t101, t103, t104, t106, t108, t113, t117, t122, t125, t135, t139, t141, t142, t143, t144, t145, t146, t151, t152, t159, t160, t161, t162, Intersection with reachable at each step enabled. (destroyed/reverse/intersect/total) :0/113/52/165
(forward)formula 0,1,12.1587,354648,1,0,376,2.07312e+06,351,214,6081,1.19293e+06,458
FORMULA ParamProductionCell-PT-3-CTLFireability-07 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
Performed 9 Pre agglomeration using Quasi-Persistent + Divergent Free condition..
Pre-agglomeration after 0 with 9 Pre rules applied. Total rules applied 0 place count 231 transition count 193
Deduced a syphon composed of 9 places in 1 ms
Reduce places removed 9 places and 0 transitions.
Iterating global reduction 0 with 18 rules applied. Total rules applied 18 place count 222 transition count 193
Discarding 5 places :
Symmetric choice reduction at 0 with 5 rule applications. Total rules 23 place count 217 transition count 188
Iterating global reduction 0 with 5 rules applied. Total rules applied 28 place count 217 transition count 188
Performed 16 Post agglomeration using F-continuation condition.Transition count delta: 16
Deduced a syphon composed of 16 places in 0 ms
Reduce places removed 16 places and 0 transitions.
Iterating global reduction 0 with 32 rules applied. Total rules applied 60 place count 201 transition count 172
Applied a total of 60 rules in 38 ms. Remains 201 /231 variables (removed 30) and now considering 172/202 (removed 30) transitions.
[2021-05-14 08:11:01] [INFO ] Flatten gal took : 9 ms
[2021-05-14 08:11:01] [INFO ] Flatten gal took : 10 ms
[2021-05-14 08:11:01] [INFO ] Input system was already deterministic with 172 transitions.
[2021-05-14 08:11:01] [INFO ] Flatten gal took : 9 ms
[2021-05-14 08:11:01] [INFO ] Flatten gal took : 9 ms
[2021-05-14 08:11:01] [INFO ] Time to serialize gal into /tmp/CTLFireability3323017678193905704.gal : 6 ms
[2021-05-14 08:11:01] [INFO ] Time to serialize properties into /tmp/CTLFireability10189585595386149627.ctl : 1 ms
Invoking ITS tools like this :CommandLine [args=[/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.202104292328/bin/its-ctl-linux64, --gc-threshold, 2000000, --quiet, -i, /tmp/CTLFireability3323017678193905704.gal, -t, CGAL, -ctl, /tmp/CTLFireability10189585595386149627.ctl, --gen-order, FOLLOW], workingDir=/home/mcc/execution]
its-ctl command run as :
/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.202104292328/bin/its-ctl-linux64 --gc-threshold 2000000 --quiet -i /tmp/CTLFireability3323017678193905704.gal -t CGAL -ctl /tmp/CTLFireability10189585595386149627.ctl --gen-order FOLLOW
No direction supplied, using forward translation only.
Parsed 1 CTL formulae.
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
reachable,351461,0.506277,23444,2,10174,5,87891,6,0,979,68382,0
Converting to forward existential form...Done !
original formula: AF((AG(((robot_stop==1)&&(A1U_rot3_in==1))) * AF(((E(AF(((((((((belt2_light_barrier_false==1)&&(belt2_start==1))&&(DB_trans_run==1))||(((arm1_pick_up_angle==1)&&(robot_right==1))&&(A1U_rot1_run==1)))||((robot_stop==1)&&(A1L_rot2_in==1)))||((table_at_load_angle==1)&&(table_stop_v==1)))||((table_stop_h==1)&&(TU_in==1)))||((arm1_stop==1)&&(A1U_unloadet==1)))) U AF(((((((((((((crane_release_height==1)&&(crane_lift==1))&&(CU_lift_run==1))||(((arm2_backward==1)&&(arm2_pick_up_ext==1))&&(A2L_ret_run==1)))||((crane_stop_v==1)&&(CU_in==1)))||((arm2_release_angle==1)&&(A2U_rot1_run==1)))||((A2U_rotated==1)&&(arm2_stop==1)))||(((table_load_angle==1)&&(table_right==1))&&(TU_rot_run==1)))||(arm1_having_swivel_1==1))||((press_up==1)&&(PL_lower_rs==1)))||((press_stop==1)&&(PU_in==1)))||((robot_left==1)&&(A2L_rot2_rs==1))))) + (((((((((((table_right==0)||(TU_rot_rs==0))&&((A2U_extended==0)||(arm2_magnet_on==0)))&&((crane_lift==0)||(CL_lift_rs==0)))&&((arm2_backward==0)||(A2U_ret_rs==0)))&&(((robot_left==0)||(arm2_pick_up_angle==0))||(A1L_rot2_run==0)))&&((arm2_release_ext==0)||(A2U_ext_run==0)))&&((robot_stop==0)||(A1U_rot3_in==0)))&&(((arm1_pick_up_ext==0)||(arm1_backward==0))||(A1L_ret_run==0)))&&((press_down==0)||(PU_lower_rs==0)))&&((TL_in==0)||(table_stop_h==0)))) + EF((((((((table_unload_angle==1)&&(table_right==1))&&(TL_rot_run==1))||((belt1_stop==1)&&(FB_in==1)))||((arm2_release_angle==1)&&(A2U_rot3_run==1)))||((belt1_light_barrier_false==1)&&(FB_deliver_run==1)))||((A2U_rotated==1)&&(arm2_stop==1))))))))
=> equivalent forward existential formula: [FwdG(Init,!((!(E(TRUE U !(((robot_stop==1)&&(A1U_rot3_in==1))))) * !(EG(!(((E(!(EG(!(((((((((belt2_light_barrier_false==1)&&(belt2_start==1))&&(DB_trans_run==1))||(((arm1_pick_up_angle==1)&&(robot_right==1))&&(A1U_rot1_run==1)))||((robot_stop==1)&&(A1L_rot2_in==1)))||((table_at_load_angle==1)&&(table_stop_v==1)))||((table_stop_h==1)&&(TU_in==1)))||((arm1_stop==1)&&(A1U_unloadet==1)))))) U !(EG(!(((((((((((((crane_release_height==1)&&(crane_lift==1))&&(CU_lift_run==1))||(((arm2_backward==1)&&(arm2_pick_up_ext==1))&&(A2L_ret_run==1)))||((crane_stop_v==1)&&(CU_in==1)))||((arm2_release_angle==1)&&(A2U_rot1_run==1)))||((A2U_rotated==1)&&(arm2_stop==1)))||(((table_load_angle==1)&&(table_right==1))&&(TU_rot_run==1)))||(arm1_having_swivel_1==1))||((press_up==1)&&(PL_lower_rs==1)))||((press_stop==1)&&(PU_in==1)))||((robot_left==1)&&(A2L_rot2_rs==1))))))) + (((((((((((table_right==0)||(TU_rot_rs==0))&&((A2U_extended==0)||(arm2_magnet_on==0)))&&((crane_lift==0)||(CL_lift_rs==0)))&&((arm2_backward==0)||(A2U_ret_rs==0)))&&(((robot_left==0)||(arm2_pick_up_angle==0))||(A1L_rot2_run==0)))&&((arm2_release_ext==0)||(A2U_ext_run==0)))&&((robot_stop==0)||(A1U_rot3_in==0)))&&(((arm1_pick_up_ext==0)||(arm1_backward==0))||(A1L_ret_run==0)))&&((press_down==0)||(PU_lower_rs==0)))&&((TL_in==0)||(table_stop_h==0)))) + E(TRUE U (((((((table_unload_angle==1)&&(table_right==1))&&(TL_rot_run==1))||((belt1_stop==1)&&(FB_in==1)))||((arm2_release_angle==1)&&(A2U_rot3_run==1)))||((belt1_light_barrier_false==1)&&(FB_deliver_run==1)))||((A2U_rotated==1)&&(arm2_stop==1)))))))))))] = FALSE
Reverse transition relation is NOT exact ! Due to transitions t2, t6, t14, t17, t20, t24, t30, t34, t37, t42, t43, t44, t46, t48, t50, t51, t56, t59, t65, t66, t68, t70, t73, t78, t81, t83, t89, t90, t92, t93, t95, t96, t101, t105, t112, t114, t115, t117, t119, t124, t127, t133, t136, t140, t147, t151, t153, t154, t160, t167, t168, t169, Intersection with reachable at each step enabled. (destroyed/reverse/intersect/total) :0/120/52/172
Detected timeout of ITS tools.
[2021-05-14 08:11:31] [INFO ] Flatten gal took : 12 ms
[2021-05-14 08:11:31] [INFO ] Applying decomposition
[2021-05-14 08:11:31] [INFO ] Flatten gal took : 8 ms
Converted graph to binary with : CommandLine [args=[/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.louvain.binaries_1.0.0.202104292328/bin/convert-linux64, -i, /tmp/graph8050982305876452567.txt, -o, /tmp/graph8050982305876452567.bin, -w, /tmp/graph8050982305876452567.weights], workingDir=null]
Built communities with : CommandLine [args=[/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.louvain.binaries_1.0.0.202104292328/bin/louvain-linux64, /tmp/graph8050982305876452567.bin, -l, -1, -v, -w, /tmp/graph8050982305876452567.weights, -q, 0, -e, 0.001], workingDir=null]
[2021-05-14 08:11:31] [INFO ] Decomposing Gal with order
[2021-05-14 08:11:31] [INFO ] Rewriting arrays to variables to allow decomposition.
[2021-05-14 08:11:31] [INFO ] Removed a total of 71 redundant transitions.
[2021-05-14 08:11:31] [INFO ] Flatten gal took : 56 ms
[2021-05-14 08:11:31] [INFO ] Fuse similar labels procedure discarded/fused a total of 2 labels/synchronizations in 31 ms.
[2021-05-14 08:11:31] [INFO ] Time to serialize gal into /tmp/CTLFireability17647230474989093357.gal : 3 ms
[2021-05-14 08:11:31] [INFO ] Time to serialize properties into /tmp/CTLFireability7833428597849735560.ctl : 1 ms
Invoking ITS tools like this :CommandLine [args=[/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.202104292328/bin/its-ctl-linux64, --gc-threshold, 2000000, --quiet, -i, /tmp/CTLFireability17647230474989093357.gal, -t, CGAL, -ctl, /tmp/CTLFireability7833428597849735560.ctl], workingDir=/home/mcc/execution]
its-ctl command run as :
/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.202104292328/bin/its-ctl-linux64 --gc-threshold 2000000 --quiet -i /tmp/CTLFireability17647230474989093357.gal -t CGAL -ctl /tmp/CTLFireability7833428597849735560.ctl
No direction supplied, using forward translation only.
Parsed 1 CTL formulae.
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
reachable,351461,0.158651,11536,1161,122,13109,490,581,12109,101,1179,0
Converting to forward existential form...Done !
original formula: AF((AG(((i5.u25.robot_stop==1)&&(i1.u39.A1U_rot3_in==1))) * AF(((E(AF(((((((((i3.u17.belt2_light_barrier_false==1)&&(i3.u16.belt2_start==1))&&(i3.u15.DB_trans_run==1))||(((i5.u24.arm1_pick_up_angle==1)&&(i5.u25.robot_right==1))&&(i5.u26.A1U_rot1_run==1)))||((i5.u25.robot_stop==1)&&(i5.u40.A1L_rot2_in==1)))||((i2.i0.u8.table_at_load_angle==1)&&(i2.i1.u9.table_stop_v==1)))||((i2.i0.u8.table_stop_h==1)&&(i2.i0.u12.TU_in==1)))||((i7.u41.arm1_stop==1)&&(i7.u43.A1U_unloadet==1)))) U AF(((((((((((((i8.u56.crane_release_height==1)&&(i8.u53.crane_lift==1))&&(i8.u54.CU_lift_run==1))||(((i6.u29.arm2_backward==1)&&(i6.u37.arm2_pick_up_ext==1))&&(i6.u38.A2L_ret_run==1)))||((i8.u53.crane_stop_v==1)&&(i9.u0.CU_in==1)))||((i5.u23.arm2_release_angle==1)&&(i5.u23.A2U_rot1_run==1)))||((i5.u25.A2U_rotated==1)&&(i6.u29.arm2_stop==1)))||(((i2.i0.u10.table_load_angle==1)&&(i2.i0.u8.table_right==1))&&(i2.i0.u14.TU_rot_run==1)))||(i1.u39.arm1_having_swivel_1==1))||((i0.u5.press_up==1)&&(i0.u5.PL_lower_rs==1)))||((i0.u2.press_stop==1)&&(i0.u1.PU_in==1)))||((i5.u25.robot_left==1)&&(i5.u36.A2L_rot2_rs==1))))) + (((((((((((i2.i0.u8.table_right==0)||(i2.i0.u14.TU_rot_rs==0))&&((i6.u30.A2U_extended==0)||(i6.u31.arm2_magnet_on==0)))&&((i8.u53.crane_lift==0)||(i8.u59.CL_lift_rs==0)))&&((i6.u29.arm2_backward==0)||(i6.u34.A2U_ret_rs==0)))&&(((i5.u25.robot_left==0)||(i5.u27.arm2_pick_up_angle==0))||(i5.u24.A1L_rot2_run==0)))&&((i6.u33.arm2_release_ext==0)||(i6.u33.A2U_ext_run==0)))&&((i5.u25.robot_stop==0)||(i1.u39.A1U_rot3_in==0)))&&(((i7.u45.arm1_pick_up_ext==0)||(i7.u41.arm1_backward==0))||(i7.u46.A1L_ret_run==0)))&&((i0.u2.press_down==0)||(i0.u3.PU_lower_rs==0)))&&((i1.u6.TL_in==0)||(i2.i0.u8.table_stop_h==0)))) + EF((((((((i2.i0.u14.table_unload_angle==1)&&(i2.i0.u8.table_right==1))&&(i2.i0.u10.TL_rot_run==1))||((i4.u19.belt1_stop==1)&&(i4.u18.FB_in==1)))||((i5.u23.arm2_release_angle==1)&&(i5.u23.A2U_rot3_run==1)))||((i4.u21.belt1_light_barrier_false==1)&&(i4.u21.FB_deliver_run==1)))||((i5.u25.A2U_rotated==1)&&(i6.u29.arm2_stop==1))))))))
=> equivalent forward existential formula: [FwdG(Init,!((!(E(TRUE U !(((i5.u25.robot_stop==1)&&(i1.u39.A1U_rot3_in==1))))) * !(EG(!(((E(!(EG(!(((((((((i3.u17.belt2_light_barrier_false==1)&&(i3.u16.belt2_start==1))&&(i3.u15.DB_trans_run==1))||(((i5.u24.arm1_pick_up_angle==1)&&(i5.u25.robot_right==1))&&(i5.u26.A1U_rot1_run==1)))||((i5.u25.robot_stop==1)&&(i5.u40.A1L_rot2_in==1)))||((i2.i0.u8.table_at_load_angle==1)&&(i2.i1.u9.table_stop_v==1)))||((i2.i0.u8.table_stop_h==1)&&(i2.i0.u12.TU_in==1)))||((i7.u41.arm1_stop==1)&&(i7.u43.A1U_unloadet==1)))))) U !(EG(!(((((((((((((i8.u56.crane_release_height==1)&&(i8.u53.crane_lift==1))&&(i8.u54.CU_lift_run==1))||(((i6.u29.arm2_backward==1)&&(i6.u37.arm2_pick_up_ext==1))&&(i6.u38.A2L_ret_run==1)))||((i8.u53.crane_stop_v==1)&&(i9.u0.CU_in==1)))||((i5.u23.arm2_release_angle==1)&&(i5.u23.A2U_rot1_run==1)))||((i5.u25.A2U_rotated==1)&&(i6.u29.arm2_stop==1)))||(((i2.i0.u10.table_load_angle==1)&&(i2.i0.u8.table_right==1))&&(i2.i0.u14.TU_rot_run==1)))||(i1.u39.arm1_having_swivel_1==1))||((i0.u5.press_up==1)&&(i0.u5.PL_lower_rs==1)))||((i0.u2.press_stop==1)&&(i0.u1.PU_in==1)))||((i5.u25.robot_left==1)&&(i5.u36.A2L_rot2_rs==1))))))) + (((((((((((i2.i0.u8.table_right==0)||(i2.i0.u14.TU_rot_rs==0))&&((i6.u30.A2U_extended==0)||(i6.u31.arm2_magnet_on==0)))&&((i8.u53.crane_lift==0)||(i8.u59.CL_lift_rs==0)))&&((i6.u29.arm2_backward==0)||(i6.u34.A2U_ret_rs==0)))&&(((i5.u25.robot_left==0)||(i5.u27.arm2_pick_up_angle==0))||(i5.u24.A1L_rot2_run==0)))&&((i6.u33.arm2_release_ext==0)||(i6.u33.A2U_ext_run==0)))&&((i5.u25.robot_stop==0)||(i1.u39.A1U_rot3_in==0)))&&(((i7.u45.arm1_pick_up_ext==0)||(i7.u41.arm1_backward==0))||(i7.u46.A1L_ret_run==0)))&&((i0.u2.press_down==0)||(i0.u3.PU_lower_rs==0)))&&((i1.u6.TL_in==0)||(i2.i0.u8.table_stop_h==0)))) + E(TRUE U (((((((i2.i0.u14.table_unload_angle==1)&&(i2.i0.u8.table_right==1))&&(i2.i0.u10.TL_rot_run==1))||((i4.u19.belt1_stop==1)&&(i4.u18.FB_in==1)))||((i5.u23.arm2_release_angle==1)&&(i5.u23.A2U_rot3_run==1)))||((i4.u21.belt1_light_barrier_false==1)&&(i4.u21.FB_deliver_run==1)))||((i5.u25.A2U_rotated==1)&&(i6.u29.arm2_stop==1)))))))))))] = FALSE
Reverse transition relation is NOT exact ! Due to transitions t14, t56, t78, t112, t115, t119, t124, t140, t147, t154, t160, t167, t168, t169, i0.t153, i0.t6, i0.t2, i1.u39.t83, i2.t17, i2.i0.t24, i2.i1.t20, i3.t30, i4.t37, i4.t34, i5.t117, i5.t96, i5.t93, i5.t90, i5.t73, i5.t70, i5.t68, i5.t66, i5.t51, i5.t48, i5.t46, i5.t44, i5.t42, i5.u23.t43, i5.u23.t50, i5.u24.t89, i5.u24.t92, i5.u24.t95, i5.u26.t114, i5.u27.t65, i6.t81, i6.t59, i7.t127, i7.t105, i7.t101, i8.t151, i8.t133, i9.u55.t136, Intersection with reachable at each step enabled. (destroyed/reverse/intersect/total) :0/119/52/171
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
(forward)formula 0,0,3.05682,136728,1,0,310244,1398,4043,306619,554,4510,671321
FORMULA ParamProductionCell-PT-3-CTLFireability-08 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL USE_NUPN
Formula is FALSE !
***************************************
Performed 11 Pre agglomeration using Quasi-Persistent + Divergent Free condition..
Pre-agglomeration after 0 with 11 Pre rules applied. Total rules applied 0 place count 231 transition count 191
Deduced a syphon composed of 11 places in 1 ms
Reduce places removed 11 places and 0 transitions.
Iterating global reduction 0 with 22 rules applied. Total rules applied 22 place count 220 transition count 191
Discarding 6 places :
Symmetric choice reduction at 0 with 6 rule applications. Total rules 28 place count 214 transition count 185
Iterating global reduction 0 with 6 rules applied. Total rules applied 34 place count 214 transition count 185
Performed 12 Post agglomeration using F-continuation condition.Transition count delta: 12
Deduced a syphon composed of 12 places in 1 ms
Reduce places removed 12 places and 0 transitions.
Iterating global reduction 0 with 24 rules applied. Total rules applied 58 place count 202 transition count 173
Applied a total of 58 rules in 19 ms. Remains 202 /231 variables (removed 29) and now considering 173/202 (removed 29) transitions.
[2021-05-14 08:11:35] [INFO ] Flatten gal took : 8 ms
[2021-05-14 08:11:35] [INFO ] Flatten gal took : 9 ms
[2021-05-14 08:11:35] [INFO ] Input system was already deterministic with 173 transitions.
[2021-05-14 08:11:35] [INFO ] Flatten gal took : 8 ms
[2021-05-14 08:11:35] [INFO ] Flatten gal took : 12 ms
[2021-05-14 08:11:35] [INFO ] Time to serialize gal into /tmp/CTLFireability15183836293801606816.gal : 1 ms
[2021-05-14 08:11:35] [INFO ] Time to serialize properties into /tmp/CTLFireability4866944035694837936.ctl : 1 ms
Invoking ITS tools like this :CommandLine [args=[/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.202104292328/bin/its-ctl-linux64, --gc-threshold, 2000000, --quiet, -i, /tmp/CTLFireability15183836293801606816.gal, -t, CGAL, -ctl, /tmp/CTLFireability4866944035694837936.ctl, --gen-order, FOLLOW], workingDir=/home/mcc/execution]
its-ctl command run as :
/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.202104292328/bin/its-ctl-linux64 --gc-threshold 2000000 --quiet -i /tmp/CTLFireability15183836293801606816.gal -t CGAL -ctl /tmp/CTLFireability4866944035694837936.ctl --gen-order FOLLOW
No direction supplied, using forward translation only.
Parsed 1 CTL formulae.
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
reachable,435534,0.460986,20404,2,9825,5,74250,6,0,984,59147,0
Converting to forward existential form...Done !
original formula: AF((E(!(EG(((((((((((((belt1_light_barrier_false==1)&&(FB_deliver_run==1))||((swivel==1)&&(arm2_waiting_for_swivel_2==1)))||(((arm2_backward==1)&&(arm2_pick_up_ext==1))&&(A2L_ret_run==1)))||((arm2_release_angle==1)&&(A2L_in==1)))||((arm2_stop==1)&&(A2U_unloaded==1)))||((arm2_release_angle==1)&&(A2U_rot1_run==1)))||((arm2_backward==1)&&(A2U_ret_rs==1)))||((arm1_pick_up_angle==1)&&(A1L_rot3_run==1)))||((table_right==1)&&(TL_rot_rs==1)))||((robot_stop==1)&&(A2L_rot2_in==1)))&&((((((ch_PA2_free==1)&&(press_ready_for_unloading==1))||((crane_mag_on==1)&&(CU_ready_to_ungrasp==1)))||((belt2_stop==1)&&(DB_at_end==1)))||((arm1_release_angle==1)&&(A1U_rot1_run==1)))||((arm2_pick_up_angle==1)&&(A1L_in==1)))))) U (((((((((arm1_pick_up_angle==1)&&(A2L_in==1))||(((arm2_backward==1)&&(arm2_pick_up_ext==1))&&(A2L_ret_run==1)))||((ch_PA2_free==1)&&(press_ready_for_unloading==1)))||((arm2_retract_ext==1)&&(A2U_ret_run==1)))||((crane_mag_on==1)&&(CU_ready_to_ungrasp==1)))||(((crane_above_deposit_belt==1)&&(crane_to_belt1==1))&&(CL_trans_run==1)))||((crane_to_belt2==1)&&(CU_trans_rs==1)))||((table_upward==1)&&(TU_lift_rs==1)))) * EG((((((((((arm1_magnet_on==1)&&(A1U_extendet==1))||(((crane_release_height==1)&&(crane_lift==1))&&(CU_lift_run==1)))||((arm1_release_angle==1)&&(A1U_rot2_run==1)))||(((table_bottom_pos==1)&&(table_upward==1))&&(TU_lift_run==1)))||((swivel==1)&&(arm1_waiting_for_swivel_1==1)))||(((arm1_pick_up_angle==1)&&(robot_right==1))&&(A1U_rot1_run==1)))||((arm2_backward==1)&&(A2U_ret_rs==1)))||(arm2_having_swivel_1==1)))))
=> equivalent forward existential formula: [FwdG(Init,!((E(!(EG(((((((((((((belt1_light_barrier_false==1)&&(FB_deliver_run==1))||((swivel==1)&&(arm2_waiting_for_swivel_2==1)))||(((arm2_backward==1)&&(arm2_pick_up_ext==1))&&(A2L_ret_run==1)))||((arm2_release_angle==1)&&(A2L_in==1)))||((arm2_stop==1)&&(A2U_unloaded==1)))||((arm2_release_angle==1)&&(A2U_rot1_run==1)))||((arm2_backward==1)&&(A2U_ret_rs==1)))||((arm1_pick_up_angle==1)&&(A1L_rot3_run==1)))||((table_right==1)&&(TL_rot_rs==1)))||((robot_stop==1)&&(A2L_rot2_in==1)))&&((((((ch_PA2_free==1)&&(press_ready_for_unloading==1))||((crane_mag_on==1)&&(CU_ready_to_ungrasp==1)))||((belt2_stop==1)&&(DB_at_end==1)))||((arm1_release_angle==1)&&(A1U_rot1_run==1)))||((arm2_pick_up_angle==1)&&(A1L_in==1)))))) U (((((((((arm1_pick_up_angle==1)&&(A2L_in==1))||(((arm2_backward==1)&&(arm2_pick_up_ext==1))&&(A2L_ret_run==1)))||((ch_PA2_free==1)&&(press_ready_for_unloading==1)))||((arm2_retract_ext==1)&&(A2U_ret_run==1)))||((crane_mag_on==1)&&(CU_ready_to_ungrasp==1)))||(((crane_above_deposit_belt==1)&&(crane_to_belt1==1))&&(CL_trans_run==1)))||((crane_to_belt2==1)&&(CU_trans_rs==1)))||((table_upward==1)&&(TU_lift_rs==1)))) * EG((((((((((arm1_magnet_on==1)&&(A1U_extendet==1))||(((crane_release_height==1)&&(crane_lift==1))&&(CU_lift_run==1)))||((arm1_release_angle==1)&&(A1U_rot2_run==1)))||(((table_bottom_pos==1)&&(table_upward==1))&&(TU_lift_run==1)))||((swivel==1)&&(arm1_waiting_for_swivel_1==1)))||(((arm1_pick_up_angle==1)&&(robot_right==1))&&(A1U_rot1_run==1)))||((arm2_backward==1)&&(A2U_ret_rs==1)))||(arm2_having_swivel_1==1))))))] = FALSE
Reverse transition relation is NOT exact ! Due to transitions t4, t10, t16, t19, t28, t34, t36, t38, t44, t45, t46, t48, t50, t52, t53, t58, t61, t67, t68, t70, t71, t74, t79, t83, t87, t88, t93, t94, t96, t97, t99, t100, t105, t108, t115, t117, t118, t120, t122, t127, t130, t135, t138, t148, t152, t154, t155, t156, t157, t158, t161, t162, Intersection with reachable at each step enabled. (destroyed/reverse/intersect/total) :0/121/52/173
(forward)formula 0,1,24.613,713316,1,0,1971,4.49108e+06,383,915,6588,3.36433e+06,2311
FORMULA ParamProductionCell-PT-3-CTLFireability-09 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
ITS tools runner thread asked to quit. Dying gracefully.
Performed 13 Pre agglomeration using Quasi-Persistent + Divergent Free condition..
Pre-agglomeration after 0 with 13 Pre rules applied. Total rules applied 0 place count 231 transition count 189
Deduced a syphon composed of 13 places in 1 ms
Reduce places removed 13 places and 0 transitions.
Iterating global reduction 0 with 26 rules applied. Total rules applied 26 place count 218 transition count 189
Discarding 5 places :
Symmetric choice reduction at 0 with 5 rule applications. Total rules 31 place count 213 transition count 184
Iterating global reduction 0 with 5 rules applied. Total rules applied 36 place count 213 transition count 184
Performed 15 Post agglomeration using F-continuation condition.Transition count delta: 15
Deduced a syphon composed of 15 places in 0 ms
Reduce places removed 15 places and 0 transitions.
Iterating global reduction 0 with 30 rules applied. Total rules applied 66 place count 198 transition count 169
Applied a total of 66 rules in 24 ms. Remains 198 /231 variables (removed 33) and now considering 169/202 (removed 33) transitions.
[2021-05-14 08:12:00] [INFO ] Flatten gal took : 7 ms
[2021-05-14 08:12:00] [INFO ] Flatten gal took : 8 ms
[2021-05-14 08:12:00] [INFO ] Input system was already deterministic with 169 transitions.
[2021-05-14 08:12:00] [INFO ] Flatten gal took : 21 ms
[2021-05-14 08:12:00] [INFO ] Flatten gal took : 7 ms
[2021-05-14 08:12:00] [INFO ] Time to serialize gal into /tmp/CTLFireability1382829625566043509.gal : 2 ms
[2021-05-14 08:12:00] [INFO ] Time to serialize properties into /tmp/CTLFireability15814760575300742977.ctl : 0 ms
Invoking ITS tools like this :CommandLine [args=[/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.202104292328/bin/its-ctl-linux64, --gc-threshold, 2000000, --quiet, -i, /tmp/CTLFireability1382829625566043509.gal, -t, CGAL, -ctl, /tmp/CTLFireability15814760575300742977.ctl, --gen-order, FOLLOW], workingDir=/home/mcc/execution]
its-ctl command run as :
/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.202104292328/bin/its-ctl-linux64 --gc-threshold 2000000 --quiet -i /tmp/CTLFireability1382829625566043509.gal -t CGAL -ctl /tmp/CTLFireability15814760575300742977.ctl --gen-order FOLLOW
No direction supplied, using forward translation only.
Parsed 1 CTL formulae.
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
reachable,343812,0.460769,20868,2,10249,5,76430,6,0,964,59090,0
Converting to forward existential form...Done !
original formula: !(EG(!(AG(((((((((((((arm2_release_angle==1)&&(A1U_in==1))||((arm2_retract_ext==1)&&(A2U_ret_run==1)))||(DB_out==1))||(((robot_right==1)&&(arm2_pick_up_angle==1))&&(A2U_rot3_run==1)))||((ch_A1P_free==1)&&(arm1_storing==1)))||((robot_right==1)&&(A2U_rot3_rs==1)))||((arm1_pick_up_angle==1)&&(A1L_rot3_run==1)))||((belt2_stop==1)&&(DB_at_end==1)))||((table_upward==1)&&(TL_lower_rs==1)))||(((arm2_release_angle==1)&&(robot_left==1))&&(A2L_rot3_run==1)))||((table_top_pos==1)&&(TU_lift_run==1)))))))
=> equivalent forward existential formula: [FwdG(Init,!(!(E(TRUE U !(((((((((((((arm2_release_angle==1)&&(A1U_in==1))||((arm2_retract_ext==1)&&(A2U_ret_run==1)))||(DB_out==1))||(((robot_right==1)&&(arm2_pick_up_angle==1))&&(A2U_rot3_run==1)))||((ch_A1P_free==1)&&(arm1_storing==1)))||((robot_right==1)&&(A2U_rot3_rs==1)))||((arm1_pick_up_angle==1)&&(A1L_rot3_run==1)))||((belt2_stop==1)&&(DB_at_end==1)))||((table_upward==1)&&(TL_lower_rs==1)))||(((arm2_release_angle==1)&&(robot_left==1))&&(A2L_rot3_run==1)))||((table_top_pos==1)&&(TU_lift_run==1))))))))] = FALSE
Reverse transition relation is NOT exact ! Due to transitions t2, t14, t17, t27, t33, t38, t40, t42, t44, t46, t48, t53, t56, t62, t63, t65, t66, t69, t74, t77, t79, t86, t87, t89, t90, t92, t93, t98, t101, t108, t110, t111, t113, t115, t120, t123, t128, t131, t141, t145, t147, t148, t149, t150, t151, t152, t156, t157, t163, t164, t166, Intersection with reachable at each step enabled. (destroyed/reverse/intersect/total) :0/118/51/169
(forward)formula 0,0,7.48613,230288,1,0,304,1.02602e+06,364,177,6583,602918,361
FORMULA ParamProductionCell-PT-3-CTLFireability-15 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is FALSE !
***************************************
[2021-05-14 08:12:07] [INFO ] Flatten gal took : 11 ms
[2021-05-14 08:12:07] [INFO ] Flatten gal took : 11 ms
[2021-05-14 08:12:07] [INFO ] Applying decomposition
[2021-05-14 08:12:07] [INFO ] Flatten gal took : 10 ms
Converted graph to binary with : CommandLine [args=[/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.louvain.binaries_1.0.0.202104292328/bin/convert-linux64, -i, /tmp/graph11513349420184926341.txt, -o, /tmp/graph11513349420184926341.bin, -w, /tmp/graph11513349420184926341.weights], workingDir=null]
Built communities with : CommandLine [args=[/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.louvain.binaries_1.0.0.202104292328/bin/louvain-linux64, /tmp/graph11513349420184926341.bin, -l, -1, -v, -w, /tmp/graph11513349420184926341.weights, -q, 0, -e, 0.001], workingDir=null]
[2021-05-14 08:12:07] [INFO ] Decomposing Gal with order
[2021-05-14 08:12:07] [INFO ] Rewriting arrays to variables to allow decomposition.
[2021-05-14 08:12:07] [INFO ] Removed a total of 65 redundant transitions.
[2021-05-14 08:12:07] [INFO ] Flatten gal took : 24 ms
[2021-05-14 08:12:07] [INFO ] Fuse similar labels procedure discarded/fused a total of 14 labels/synchronizations in 3 ms.
[2021-05-14 08:12:07] [INFO ] Time to serialize gal into /tmp/CTLFireability4910242220714759433.gal : 4 ms
[2021-05-14 08:12:07] [INFO ] Time to serialize properties into /tmp/CTLFireability8898108069904114564.ctl : 7 ms
Invoking ITS tools like this :CommandLine [args=[/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.202104292328/bin/its-ctl-linux64, --gc-threshold, 2000000, --quiet, -i, /tmp/CTLFireability4910242220714759433.gal, -t, CGAL, -ctl, /tmp/CTLFireability8898108069904114564.ctl], workingDir=/home/mcc/execution]
its-ctl command run as :
/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.202104292328/bin/its-ctl-linux64 --gc-threshold 2000000 --quiet -i /tmp/CTLFireability4910242220714759433.gal -t CGAL -ctl /tmp/CTLFireability8898108069904114564.ctl
No direction supplied, using forward translation only.
Parsed 10 CTL formulae.
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
reachable,1.46521e+06,0.262522,15356,1078,426,17753,7086,611,18951,181,22242,0
Converting to forward existential form...Done !
original formula: (EG(A((((((((((i10.i0.u68.crane_above_deposit_belt==1)&&(i10.i0.u68.CU_trans_run==1))||((i6.u41.arm2_retract_ext==1)&&(i6.u41.A2U_ret_run==1)))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot3_run==1)))||(((i5.u35.arm1_pick_up_angle==1)&&(i5.u35.robot_right==1))&&(i5.u35.A2U_rot1_run==1)))||((i6.u37.arm2_stop==1)&&(i5.u36.A2L_rotated==1)))||((i1.u12.press_at_middle_pos==1)&&(i1.u12.PL_lower_run==1)))||((i2.i2.u48.swivel==1)&&(i2.i0.u50.arm1_waiting_for_swivel_2==1)))||((i6.u41.arm2_retract_ext==1)&&(i6.u47.A2L_ret_run==1))) U (!(AX(((((((((i0.i2.u30.belt1_start==1)&&(i0.i2.u31.FB_trans_rs==1))||((i5.u35.arm2_release_angle==1)&&(i5.u35.A2U_rot2_run==1)))||((i8.u72.crane_pick_up_height==1)&&(i8.u72.CL_lower_run==1)))||((i6.u38.A2U_extended==1)&&(i6.u39.arm2_magnet_on==1)))||((i3.i0.u16.table_stop_v==1)&&(i3.i1.u15.table_at_unload_angle==1)))||((i3.i1.u22.table_unload_angle==1)&&(i3.i1.u22.TU_rot_run==1)))||(((i0.i2.u32.belt1_light_barrier_false==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u31.FB_trans_run==1))))) + E((((((((i10.i0.u65.crane_to_belt1==1)&&(i10.i0.u73.CL_trans_rs==1))||(i2.i1.u20.TU_out==1))||((i5.u35.A2U_rotated==1)&&(i6.u37.arm2_stop==1)))||(((i5.u35.arm1_pick_up_angle==1)&&(i5.u35.robot_right==1))&&(i5.u35.A2U_rot1_run==1)))||((i5.u36.robot_left==1)&&(i5.u45.A2L_rot3_rs==1)))||(i0.i0.u13.TL_out==1)) U (((((((((((((((((i6.u37.arm2_backward==1)&&(i6.u46.arm2_pick_up_ext==1))&&(i6.u47.A2L_ret_run==1))||((i5.u35.arm2_release_angle==1)&&(i5.u35.A2U_rot2_run==1)))||(((i5.u35.robot_right==1)&&(i5.u35.arm2_pick_up_angle==1))&&(i5.u35.A2U_rot3_run==1)))||(((i1.u9.press_at_lower_pos==1)&&(i1.u7.press_up==1))&&(i1.u12.PL_lower_run==1)))||((i1.u7.press_down==1)&&(i1.u9.PU_lower_rs==1)))||((i0.i2.u30.belt1_start==1)&&(i0.i2.u31.FB_trans_rs==1)))||((i7.u57.arm1_magnet_on==1)&&(i7.u57.A1U_extendet==1)))||(i2.i0.u8.A1U_out==1))||((i5.u36.robot_left==1)&&(i5.u54.A1L_rot3_rs==1)))||((i6.u37.arm2_forward==1)&&(i6.u40.A2U_ext_rs==1)))||(((i5.u36.robot_left==1)&&(i5.u35.arm2_pick_up_angle==1))&&(i5.u53.A1L_rot2_run==1)))||(((i5.u35.robot_right==1)&&(i5.u35.arm2_pick_up_angle==1))&&(i5.u35.A2U_rot3_run==1)))||((i8.u63.crane_stop_v==1)&&(i8.u64.CU_unloaded==1)))||(((i5.u35.arm1_pick_up_angle==1)&&(i5.u36.robot_left==1))&&(i5.u43.A2L_rot1_run==1)))||((i5.u35.arm1_release_angle==1)&&(i5.u51.A1L_in==1))))))) + E(AG(((((!(EF(((i4.i1.u5.PU_out==1)||((i1.u9.press_at_lower_pos==1)&&(i1.u9.PU_lower_run==1))))) + ((((((((((i6.u40.arm2_release_ext==0)||(i6.u37.arm2_backward==0))||(i6.u41.A2U_ret_run==0))&&((i9.i0.u27.belt2_light_barrier_false==0)||(i9.i0.u27.DB_deliver_run==0)))&&((i1.u7.press_stop==0)||(i2.i0.u8.PU_in==0)))&&((i6.u40.arm2_release_ext==0)||(i6.u40.A2U_ext_run==0)))&&((i3.i0.u16.table_upward==0)||(i3.i0.u21.TU_lift_rs==0)))&&((i3.i1.u22.table_unload_angle==0)||(i3.i1.u22.TU_rot_run==0)))&&((i7.u55.arm1_backward==0)||(i7.u61.A1U_ret_rs==0)))&&((i7.u55.arm1_stop==0)||(i7.u57.A1U_unloadet==0)))) + (i5.u35.robot_right==0)) + (i5.u35.A1U_rot2_rs==0)) * EF((((i9.i0.u24.belt2_start==1)&&(i9.i0.u26.DB_trans_rs==1))||((i6.u40.arm2_release_ext==1)&&(i6.u40.A2U_ext_run==1)))))) U ((((((((((((((((((((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u35.A1U_rot3_run==1))||((i8.u67.crane_transport_height==1)&&(i8.u74.CL_lift_run==1)))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot3_run==1)))||(((i5.u35.arm1_pick_up_angle==1)&&(i5.u35.robot_right==1))&&(i5.u35.A2U_rot1_run==1)))||((i6.u37.arm2_backward==1)&&(i6.u41.A2U_ret_rs==1)))||((i3.i0.u16.table_upward==1)&&(i3.i0.u21.TU_lift_rs==1)))||((i5.u35.A2U_in==1)&&(i5.u35.arm1_pick_up_angle==1)))||(((i5.u36.robot_left==1)&&(i5.u35.arm1_release_angle==1))&&(i5.u52.A1L_rot1_run==1)))||((i5.u35.arm1_pick_up_angle==1)&&(i5.u53.A1L_rot2_run==1)))&&((((((i4.i1.u5.PU_out==1)||((i8.u67.crane_transport_height==1)&&(i8.u74.CL_lift_run==1)))||(i2.i0.u8.A1U_out==1))||(((i7.u58.arm1_pick_up_ext==1)&&(i7.u55.arm1_backward==1))&&(i7.u59.A1L_ret_run==1)))||((i1.u12.press_at_middle_pos==1)&&(i1.u12.PL_lower_run==1)))||((i3.i0.u18.table_bottom_pos==1)&&(i3.i0.u18.TL_lower_run==1))))||((i2.i2.u49.arm1_having_swivel_1==0)&&((i5.u35.arm2_pick_up_angle==0)||(i5.u45.A2L_rot3_run==0)))) + !(EG((((((i8.u63.crane_lift==1)&&(i8.u72.crane_pick_up_height==1))&&(i8.u74.CL_lift_run==1))||((i10.i0.u65.crane_to_belt1==1)&&(i10.i0.u73.CL_trans_rs==1)))||((i1.u7.press_up==1)&&(i1.u12.PL_lower_rs==1)))))) * EF(((((i6.u37.arm2_backward==1)&&(i6.u41.A2U_ret_rs==1))||(((i5.u35.robot_right==1)&&(i5.u35.arm2_pick_up_angle==1))&&(i5.u35.A2U_rot3_run==1)))||((i5.u35.arm2_pick_up_angle==1)&&(i5.u45.A2L_rot3_run==1))))) + ((i5.u35.arm2_release_angle==1)&&(i5.u35.A2U_rot3_run==1))) + ((i7.u60.arm1_release_ext==1)&&(i7.u60.A1U_ext_run==1))) + ((i1.u7.press_up==1)&&(i1.u12.PL_lower_rs==1))) + ((i5.u35.robot_right==1)&&(i5.u35.A2U_rot3_rs==1))) + ((i2.i0.u8.ch_A1P_full==1)&&(i2.i0.u11.press_ready_for_loading==1)))))
=> equivalent forward existential formula: ([FwdG(Init,!((E(!((!(!(EX(!(((((((((i0.i2.u30.belt1_start==1)&&(i0.i2.u31.FB_trans_rs==1))||((i5.u35.arm2_release_angle==1)&&(i5.u35.A2U_rot2_run==1)))||((i8.u72.crane_pick_up_height==1)&&(i8.u72.CL_lower_run==1)))||((i6.u38.A2U_extended==1)&&(i6.u39.arm2_magnet_on==1)))||((i3.i0.u16.table_stop_v==1)&&(i3.i1.u15.table_at_unload_angle==1)))||((i3.i1.u22.table_unload_angle==1)&&(i3.i1.u22.TU_rot_run==1)))||(((i0.i2.u32.belt1_light_barrier_false==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u31.FB_trans_run==1))))))) + E((((((((i10.i0.u65.crane_to_belt1==1)&&(i10.i0.u73.CL_trans_rs==1))||(i2.i1.u20.TU_out==1))||((i5.u35.A2U_rotated==1)&&(i6.u37.arm2_stop==1)))||(((i5.u35.arm1_pick_up_angle==1)&&(i5.u35.robot_right==1))&&(i5.u35.A2U_rot1_run==1)))||((i5.u36.robot_left==1)&&(i5.u45.A2L_rot3_rs==1)))||(i0.i0.u13.TL_out==1)) U (((((((((((((((((i6.u37.arm2_backward==1)&&(i6.u46.arm2_pick_up_ext==1))&&(i6.u47.A2L_ret_run==1))||((i5.u35.arm2_release_angle==1)&&(i5.u35.A2U_rot2_run==1)))||(((i5.u35.robot_right==1)&&(i5.u35.arm2_pick_up_angle==1))&&(i5.u35.A2U_rot3_run==1)))||(((i1.u9.press_at_lower_pos==1)&&(i1.u7.press_up==1))&&(i1.u12.PL_lower_run==1)))||((i1.u7.press_down==1)&&(i1.u9.PU_lower_rs==1)))||((i0.i2.u30.belt1_start==1)&&(i0.i2.u31.FB_trans_rs==1)))||((i7.u57.arm1_magnet_on==1)&&(i7.u57.A1U_extendet==1)))||(i2.i0.u8.A1U_out==1))||((i5.u36.robot_left==1)&&(i5.u54.A1L_rot3_rs==1)))||((i6.u37.arm2_forward==1)&&(i6.u40.A2U_ext_rs==1)))||(((i5.u36.robot_left==1)&&(i5.u35.arm2_pick_up_angle==1))&&(i5.u53.A1L_rot2_run==1)))||(((i5.u35.robot_right==1)&&(i5.u35.arm2_pick_up_angle==1))&&(i5.u35.A2U_rot3_run==1)))||((i8.u63.crane_stop_v==1)&&(i8.u64.CU_unloaded==1)))||(((i5.u35.arm1_pick_up_angle==1)&&(i5.u36.robot_left==1))&&(i5.u43.A2L_rot1_run==1)))||((i5.u35.arm1_release_angle==1)&&(i5.u51.A1L_in==1)))))) U (!((((((((((i10.i0.u68.crane_above_deposit_belt==1)&&(i10.i0.u68.CU_trans_run==1))||((i6.u41.arm2_retract_ext==1)&&(i6.u41.A2U_ret_run==1)))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot3_run==1)))||(((i5.u35.arm1_pick_up_angle==1)&&(i5.u35.robot_right==1))&&(i5.u35.A2U_rot1_run==1)))||((i6.u37.arm2_stop==1)&&(i5.u36.A2L_rotated==1)))||((i1.u12.press_at_middle_pos==1)&&(i1.u12.PL_lower_run==1)))||((i2.i2.u48.swivel==1)&&(i2.i0.u50.arm1_waiting_for_swivel_2==1)))||((i6.u41.arm2_retract_ext==1)&&(i6.u47.A2L_ret_run==1)))) * !((!(!(EX(!(((((((((i0.i2.u30.belt1_start==1)&&(i0.i2.u31.FB_trans_rs==1))||((i5.u35.arm2_release_angle==1)&&(i5.u35.A2U_rot2_run==1)))||((i8.u72.crane_pick_up_height==1)&&(i8.u72.CL_lower_run==1)))||((i6.u38.A2U_extended==1)&&(i6.u39.arm2_magnet_on==1)))||((i3.i0.u16.table_stop_v==1)&&(i3.i1.u15.table_at_unload_angle==1)))||((i3.i1.u22.table_unload_angle==1)&&(i3.i1.u22.TU_rot_run==1)))||(((i0.i2.u32.belt1_light_barrier_false==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u31.FB_trans_run==1))))))) + E((((((((i10.i0.u65.crane_to_belt1==1)&&(i10.i0.u73.CL_trans_rs==1))||(i2.i1.u20.TU_out==1))||((i5.u35.A2U_rotated==1)&&(i6.u37.arm2_stop==1)))||(((i5.u35.arm1_pick_up_angle==1)&&(i5.u35.robot_right==1))&&(i5.u35.A2U_rot1_run==1)))||((i5.u36.robot_left==1)&&(i5.u45.A2L_rot3_rs==1)))||(i0.i0.u13.TL_out==1)) U (((((((((((((((((i6.u37.arm2_backward==1)&&(i6.u46.arm2_pick_up_ext==1))&&(i6.u47.A2L_ret_run==1))||((i5.u35.arm2_release_angle==1)&&(i5.u35.A2U_rot2_run==1)))||(((i5.u35.robot_right==1)&&(i5.u35.arm2_pick_up_angle==1))&&(i5.u35.A2U_rot3_run==1)))||(((i1.u9.press_at_lower_pos==1)&&(i1.u7.press_up==1))&&(i1.u12.PL_lower_run==1)))||((i1.u7.press_down==1)&&(i1.u9.PU_lower_rs==1)))||((i0.i2.u30.belt1_start==1)&&(i0.i2.u31.FB_trans_rs==1)))||((i7.u57.arm1_magnet_on==1)&&(i7.u57.A1U_extendet==1)))||(i2.i0.u8.A1U_out==1))||((i5.u36.robot_left==1)&&(i5.u54.A1L_rot3_rs==1)))||((i6.u37.arm2_forward==1)&&(i6.u40.A2U_ext_rs==1)))||(((i5.u36.robot_left==1)&&(i5.u35.arm2_pick_up_angle==1))&&(i5.u53.A1L_rot2_run==1)))||(((i5.u35.robot_right==1)&&(i5.u35.arm2_pick_up_angle==1))&&(i5.u35.A2U_rot3_run==1)))||((i8.u63.crane_stop_v==1)&&(i8.u64.CU_unloaded==1)))||(((i5.u35.arm1_pick_up_angle==1)&&(i5.u36.robot_left==1))&&(i5.u43.A2L_rot1_run==1)))||((i5.u35.arm1_release_angle==1)&&(i5.u51.A1L_in==1)))))))) + EG(!((!(!(EX(!(((((((((i0.i2.u30.belt1_start==1)&&(i0.i2.u31.FB_trans_rs==1))||((i5.u35.arm2_release_angle==1)&&(i5.u35.A2U_rot2_run==1)))||((i8.u72.crane_pick_up_height==1)&&(i8.u72.CL_lower_run==1)))||((i6.u38.A2U_extended==1)&&(i6.u39.arm2_magnet_on==1)))||((i3.i0.u16.table_stop_v==1)&&(i3.i1.u15.table_at_unload_angle==1)))||((i3.i1.u22.table_unload_angle==1)&&(i3.i1.u22.TU_rot_run==1)))||(((i0.i2.u32.belt1_light_barrier_false==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u31.FB_trans_run==1))))))) + E((((((((i10.i0.u65.crane_to_belt1==1)&&(i10.i0.u73.CL_trans_rs==1))||(i2.i1.u20.TU_out==1))||((i5.u35.A2U_rotated==1)&&(i6.u37.arm2_stop==1)))||(((i5.u35.arm1_pick_up_angle==1)&&(i5.u35.robot_right==1))&&(i5.u35.A2U_rot1_run==1)))||((i5.u36.robot_left==1)&&(i5.u45.A2L_rot3_rs==1)))||(i0.i0.u13.TL_out==1)) U (((((((((((((((((i6.u37.arm2_backward==1)&&(i6.u46.arm2_pick_up_ext==1))&&(i6.u47.A2L_ret_run==1))||((i5.u35.arm2_release_angle==1)&&(i5.u35.A2U_rot2_run==1)))||(((i5.u35.robot_right==1)&&(i5.u35.arm2_pick_up_angle==1))&&(i5.u35.A2U_rot3_run==1)))||(((i1.u9.press_at_lower_pos==1)&&(i1.u7.press_up==1))&&(i1.u12.PL_lower_run==1)))||((i1.u7.press_down==1)&&(i1.u9.PU_lower_rs==1)))||((i0.i2.u30.belt1_start==1)&&(i0.i2.u31.FB_trans_rs==1)))||((i7.u57.arm1_magnet_on==1)&&(i7.u57.A1U_extendet==1)))||(i2.i0.u8.A1U_out==1))||((i5.u36.robot_left==1)&&(i5.u54.A1L_rot3_rs==1)))||((i6.u37.arm2_forward==1)&&(i6.u40.A2U_ext_rs==1)))||(((i5.u36.robot_left==1)&&(i5.u35.arm2_pick_up_angle==1))&&(i5.u53.A1L_rot2_run==1)))||(((i5.u35.robot_right==1)&&(i5.u35.arm2_pick_up_angle==1))&&(i5.u35.A2U_rot3_run==1)))||((i8.u63.crane_stop_v==1)&&(i8.u64.CU_unloaded==1)))||(((i5.u35.arm1_pick_up_angle==1)&&(i5.u36.robot_left==1))&&(i5.u43.A2L_rot1_run==1)))||((i5.u35.arm1_release_angle==1)&&(i5.u51.A1L_in==1))))))))))] != FALSE + ((((([(FwdU((FwdU(Init,!(E(TRUE U !(((((!(E(TRUE U ((i4.i1.u5.PU_out==1)||((i1.u9.press_at_lower_pos==1)&&(i1.u9.PU_lower_run==1))))) + ((((((((((i6.u40.arm2_release_ext==0)||(i6.u37.arm2_backward==0))||(i6.u41.A2U_ret_run==0))&&((i9.i0.u27.belt2_light_barrier_false==0)||(i9.i0.u27.DB_deliver_run==0)))&&((i1.u7.press_stop==0)||(i2.i0.u8.PU_in==0)))&&((i6.u40.arm2_release_ext==0)||(i6.u40.A2U_ext_run==0)))&&((i3.i0.u16.table_upward==0)||(i3.i0.u21.TU_lift_rs==0)))&&((i3.i1.u22.table_unload_angle==0)||(i3.i1.u22.TU_rot_run==0)))&&((i7.u55.arm1_backward==0)||(i7.u61.A1U_ret_rs==0)))&&((i7.u55.arm1_stop==0)||(i7.u57.A1U_unloadet==0)))) + (i5.u35.robot_right==0)) + (i5.u35.A1U_rot2_rs==0)) * E(TRUE U (((i9.i0.u24.belt2_start==1)&&(i9.i0.u26.DB_trans_rs==1))||((i6.u40.arm2_release_ext==1)&&(i6.u40.A2U_ext_run==1))))))))) * ((((((((((((((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u35.A1U_rot3_run==1))||((i8.u67.crane_transport_height==1)&&(i8.u74.CL_lift_run==1)))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot3_run==1)))||(((i5.u35.arm1_pick_up_angle==1)&&(i5.u35.robot_right==1))&&(i5.u35.A2U_rot1_run==1)))||((i6.u37.arm2_backward==1)&&(i6.u41.A2U_ret_rs==1)))||((i3.i0.u16.table_upward==1)&&(i3.i0.u21.TU_lift_rs==1)))||((i5.u35.A2U_in==1)&&(i5.u35.arm1_pick_up_angle==1)))||(((i5.u36.robot_left==1)&&(i5.u35.arm1_release_angle==1))&&(i5.u52.A1L_rot1_run==1)))||((i5.u35.arm1_pick_up_angle==1)&&(i5.u53.A1L_rot2_run==1)))&&((((((i4.i1.u5.PU_out==1)||((i8.u67.crane_transport_height==1)&&(i8.u74.CL_lift_run==1)))||(i2.i0.u8.A1U_out==1))||(((i7.u58.arm1_pick_up_ext==1)&&(i7.u55.arm1_backward==1))&&(i7.u59.A1L_ret_run==1)))||((i1.u12.press_at_middle_pos==1)&&(i1.u12.PL_lower_run==1)))||((i3.i0.u18.table_bottom_pos==1)&&(i3.i0.u18.TL_lower_run==1))))||((i2.i2.u49.arm1_having_swivel_1==0)&&((i5.u35.arm2_pick_up_angle==0)||(i5.u45.A2L_rot3_run==0)))) + !(EG((((((i8.u63.crane_lift==1)&&(i8.u72.crane_pick_up_height==1))&&(i8.u74.CL_lift_run==1))||((i10.i0.u65.crane_to_belt1==1)&&(i10.i0.u73.CL_trans_rs==1)))||((i1.u7.press_up==1)&&(i1.u12.PL_lower_rs==1))))))),TRUE) * ((((i6.u37.arm2_backward==1)&&(i6.u41.A2U_ret_rs==1))||(((i5.u35.robot_right==1)&&(i5.u35.arm2_pick_up_angle==1))&&(i5.u35.A2U_rot3_run==1)))||((i5.u35.arm2_pick_up_angle==1)&&(i5.u45.A2L_rot3_run==1))))] != FALSE + [(FwdU(Init,!(E(TRUE U !(((((!(E(TRUE U ((i4.i1.u5.PU_out==1)||((i1.u9.press_at_lower_pos==1)&&(i1.u9.PU_lower_run==1))))) + ((((((((((i6.u40.arm2_release_ext==0)||(i6.u37.arm2_backward==0))||(i6.u41.A2U_ret_run==0))&&((i9.i0.u27.belt2_light_barrier_false==0)||(i9.i0.u27.DB_deliver_run==0)))&&((i1.u7.press_stop==0)||(i2.i0.u8.PU_in==0)))&&((i6.u40.arm2_release_ext==0)||(i6.u40.A2U_ext_run==0)))&&((i3.i0.u16.table_upward==0)||(i3.i0.u21.TU_lift_rs==0)))&&((i3.i1.u22.table_unload_angle==0)||(i3.i1.u22.TU_rot_run==0)))&&((i7.u55.arm1_backward==0)||(i7.u61.A1U_ret_rs==0)))&&((i7.u55.arm1_stop==0)||(i7.u57.A1U_unloadet==0)))) + (i5.u35.robot_right==0)) + (i5.u35.A1U_rot2_rs==0)) * E(TRUE U (((i9.i0.u24.belt2_start==1)&&(i9.i0.u26.DB_trans_rs==1))||((i6.u40.arm2_release_ext==1)&&(i6.u40.A2U_ext_run==1))))))))) * ((i5.u35.arm2_release_angle==1)&&(i5.u35.A2U_rot3_run==1)))] != FALSE) + [(FwdU(Init,!(E(TRUE U !(((((!(E(TRUE U ((i4.i1.u5.PU_out==1)||((i1.u9.press_at_lower_pos==1)&&(i1.u9.PU_lower_run==1))))) + ((((((((((i6.u40.arm2_release_ext==0)||(i6.u37.arm2_backward==0))||(i6.u41.A2U_ret_run==0))&&((i9.i0.u27.belt2_light_barrier_false==0)||(i9.i0.u27.DB_deliver_run==0)))&&((i1.u7.press_stop==0)||(i2.i0.u8.PU_in==0)))&&((i6.u40.arm2_release_ext==0)||(i6.u40.A2U_ext_run==0)))&&((i3.i0.u16.table_upward==0)||(i3.i0.u21.TU_lift_rs==0)))&&((i3.i1.u22.table_unload_angle==0)||(i3.i1.u22.TU_rot_run==0)))&&((i7.u55.arm1_backward==0)||(i7.u61.A1U_ret_rs==0)))&&((i7.u55.arm1_stop==0)||(i7.u57.A1U_unloadet==0)))) + (i5.u35.robot_right==0)) + (i5.u35.A1U_rot2_rs==0)) * E(TRUE U (((i9.i0.u24.belt2_start==1)&&(i9.i0.u26.DB_trans_rs==1))||((i6.u40.arm2_release_ext==1)&&(i6.u40.A2U_ext_run==1))))))))) * ((i7.u60.arm1_release_ext==1)&&(i7.u60.A1U_ext_run==1)))] != FALSE) + [(FwdU(Init,!(E(TRUE U !(((((!(E(TRUE U ((i4.i1.u5.PU_out==1)||((i1.u9.press_at_lower_pos==1)&&(i1.u9.PU_lower_run==1))))) + ((((((((((i6.u40.arm2_release_ext==0)||(i6.u37.arm2_backward==0))||(i6.u41.A2U_ret_run==0))&&((i9.i0.u27.belt2_light_barrier_false==0)||(i9.i0.u27.DB_deliver_run==0)))&&((i1.u7.press_stop==0)||(i2.i0.u8.PU_in==0)))&&((i6.u40.arm2_release_ext==0)||(i6.u40.A2U_ext_run==0)))&&((i3.i0.u16.table_upward==0)||(i3.i0.u21.TU_lift_rs==0)))&&((i3.i1.u22.table_unload_angle==0)||(i3.i1.u22.TU_rot_run==0)))&&((i7.u55.arm1_backward==0)||(i7.u61.A1U_ret_rs==0)))&&((i7.u55.arm1_stop==0)||(i7.u57.A1U_unloadet==0)))) + (i5.u35.robot_right==0)) + (i5.u35.A1U_rot2_rs==0)) * E(TRUE U (((i9.i0.u24.belt2_start==1)&&(i9.i0.u26.DB_trans_rs==1))||((i6.u40.arm2_release_ext==1)&&(i6.u40.A2U_ext_run==1))))))))) * ((i1.u7.press_up==1)&&(i1.u12.PL_lower_rs==1)))] != FALSE) + [(FwdU(Init,!(E(TRUE U !(((((!(E(TRUE U ((i4.i1.u5.PU_out==1)||((i1.u9.press_at_lower_pos==1)&&(i1.u9.PU_lower_run==1))))) + ((((((((((i6.u40.arm2_release_ext==0)||(i6.u37.arm2_backward==0))||(i6.u41.A2U_ret_run==0))&&((i9.i0.u27.belt2_light_barrier_false==0)||(i9.i0.u27.DB_deliver_run==0)))&&((i1.u7.press_stop==0)||(i2.i0.u8.PU_in==0)))&&((i6.u40.arm2_release_ext==0)||(i6.u40.A2U_ext_run==0)))&&((i3.i0.u16.table_upward==0)||(i3.i0.u21.TU_lift_rs==0)))&&((i3.i1.u22.table_unload_angle==0)||(i3.i1.u22.TU_rot_run==0)))&&((i7.u55.arm1_backward==0)||(i7.u61.A1U_ret_rs==0)))&&((i7.u55.arm1_stop==0)||(i7.u57.A1U_unloadet==0)))) + (i5.u35.robot_right==0)) + (i5.u35.A1U_rot2_rs==0)) * E(TRUE U (((i9.i0.u24.belt2_start==1)&&(i9.i0.u26.DB_trans_rs==1))||((i6.u40.arm2_release_ext==1)&&(i6.u40.A2U_ext_run==1))))))))) * ((i5.u35.robot_right==1)&&(i5.u35.A2U_rot3_rs==1)))] != FALSE) + [(FwdU(Init,!(E(TRUE U !(((((!(E(TRUE U ((i4.i1.u5.PU_out==1)||((i1.u9.press_at_lower_pos==1)&&(i1.u9.PU_lower_run==1))))) + ((((((((((i6.u40.arm2_release_ext==0)||(i6.u37.arm2_backward==0))||(i6.u41.A2U_ret_run==0))&&((i9.i0.u27.belt2_light_barrier_false==0)||(i9.i0.u27.DB_deliver_run==0)))&&((i1.u7.press_stop==0)||(i2.i0.u8.PU_in==0)))&&((i6.u40.arm2_release_ext==0)||(i6.u40.A2U_ext_run==0)))&&((i3.i0.u16.table_upward==0)||(i3.i0.u21.TU_lift_rs==0)))&&((i3.i1.u22.table_unload_angle==0)||(i3.i1.u22.TU_rot_run==0)))&&((i7.u55.arm1_backward==0)||(i7.u61.A1U_ret_rs==0)))&&((i7.u55.arm1_stop==0)||(i7.u57.A1U_unloadet==0)))) + (i5.u35.robot_right==0)) + (i5.u35.A1U_rot2_rs==0)) * E(TRUE U (((i9.i0.u24.belt2_start==1)&&(i9.i0.u26.DB_trans_rs==1))||((i6.u40.arm2_release_ext==1)&&(i6.u40.A2U_ext_run==1))))))))) * ((i2.i0.u8.ch_A1P_full==1)&&(i2.i0.u11.press_ready_for_loading==1)))] != FALSE))
Reverse transition relation is NOT exact ! Due to transitions t10, t14, t22, t34, t42, t62, t65, t86, t110, t142, t166, t187, t192, t196, i0.t54, i0.i2.t58, i1.t6, i2.t121, i2.t118, i3.t30, i3.i0.t26, i5.t161, i5.t157, i5.t155, i5.t137, i5.t135, i5.t133, i5.t131, i5.t129, i5.t127, i5.t105, i5.t101, i5.t99, i5.t97, i5.t95, i5.t75, i6.t114, i6.t90, i7.t170, i7.t146, i8.t200, i8.t179, i9.i0.t46, i10.i0.t183, Intersection with reachable at each step enabled. (destroyed/reverse/intersect/total) :0/149/44/193
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
(forward)formula 0,1,6.9671,267796,1,0,622058,9959,3771,638813,1019,38263,994363
FORMULA ParamProductionCell-PT-3-CTLFireability-00 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL USE_NUPN
Formula is TRUE !
***************************************
original formula: A(!(A(AX(AG((((((((i0.i1.u29.ch_CF_free==1)&&(i10.i1.u66.crane_storing==1))||((i8.u63.crane_stop_v==1)&&(i10.i1.u66.CU_in==1)))||((i5.u35.A2U_in==1)&&(i5.u35.arm2_pick_up_angle==1)))||(((i3.i0.u21.table_top_pos==1)&&(i3.i0.u16.table_upward==1))&&(i3.i0.u18.TL_lower_run==1)))||((i7.u60.arm1_release_ext==1)&&(i7.u60.A1U_ext_run==1)))||(i2.i2.u49.A1L_out==1)))) U (EG(AF((((((((((i5.u35.arm1_pick_up_angle==1)&&(i5.u42.A2L_in==1))||(i4.i1.u5.PU_out==1))||((i8.u62.crane_mag_off==1)&&(i8.u71.CL_ready_to_grasp==1)))||((i6.u37.arm2_forward==1)&&(i6.u46.A2L_ext_rs==1)))||(i2.i1.u20.TU_out==1))||((i7.u56.A1_extended==1)&&(i7.u57.arm1_magnet_off==1)))||(((i5.u36.robot_left==1)&&(i5.u35.arm1_release_angle==1))&&(i5.u52.A1L_rot1_run==1)))||((i5.u36.robot_stop==1)&&(i5.u35.A2U_rot1_in==1))))) + (((((((((((((i8.u63.crane_lower==0)||(i8.u72.CL_lower_rs==0))&&((i3.i1.u17.table_load_angle==0)||(i3.i1.u17.TL_rot_run==0)))&&(((i6.u41.arm2_retract_ext==0)||(i6.u37.arm2_forward==0))||(i6.u40.A2U_ext_run==0)))&&(i0.i0.u19.FB_out==0))&&(((i5.u35.robot_right==0)||(i5.u35.arm2_pick_up_angle==0))||(i5.u35.A2U_rot3_run==0)))&&((i7.u55.arm1_stop==0)||(i5.u35.A1U_rotated==0)))&&((i7.u55.arm1_backward==0)||(i7.u59.A1L_ret_rs==0)))&&((i5.u35.arm1_pick_up_angle==0)||(i5.u53.A1L_rot2_run==0)))&&(((i7.u59.arm1_retract_ext==0)||(i7.u55.arm1_forward==0))||(i7.u60.A1U_ext_run==0)))&&((i7.u55.arm1_backward==0)||(i7.u61.A1U_ret_rs==0)))||((((((((i0.i2.u32.belt1_light_barrier_false==0)||(i0.i2.u32.FB_deliver_run==0))&&(((i5.u35.arm1_pick_up_angle==0)||(i5.u35.robot_right==0))||(i5.u35.A1U_rot1_run==0)))&&(((i3.i1.u17.table_load_angle==0)||(i3.i1.u15.table_right==0))||(i3.i1.u22.TU_rot_run==0)))&&(((i7.u55.arm1_backward==0)||(i7.u60.arm1_release_ext==0))||(i7.u61.A1U_ret_run==0)))&&((i9.i0.u24.belt2_start==0)||(i9.i0.u27.DB_deliver_rs==0)))&&((i8.u69.crane_release_height==0)||(i8.u69.CU_lower_run==0)))&&(i4.i2.u34.A2U_out==0))) * EF(((((((((((i5.u36.robot_stop==1)&&(i5.u35.A2U_rot2_in==1))||((i5.u35.arm1_pick_up_angle==1)&&(i5.u52.A1L_rot1_run==1)))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot2_run==1)))||((i5.u36.A1L_rotated==1)&&(i7.u55.arm1_stop==1)))||((i9.i0.u26.belt2_light_barrier_true==1)&&(i9.i0.u26.DB_trans_run==1)))||((i6.u39.arm2_magnet_off==1)&&(i6.u39.A2L_extended==1)))||(((i10.i0.u68.crane_above_deposit_belt==1)&&(i10.i0.u65.crane_to_belt1==1))&&(i10.i0.u73.CL_trans_run==1)))||((i8.u63.crane_lower==1)&&(i8.u69.CU_lower_rs==1)))||(((i6.u41.arm2_retract_ext==1)&&(i6.u37.arm2_forward==1))&&(i6.u46.A2L_ext_run==1)))))))) U ((((((((((AF(AG((((i0.i0.u13.TL_out==1)||(((i3.i1.u17.table_load_angle==1)&&(i3.i1.u15.table_right==1))&&(i3.i1.u22.TU_rot_run==1)))||(((i0.i2.u32.belt1_light_barrier_false==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u31.FB_trans_run==1))))) + ((i0.i2.u30.belt1_start==1)&&(i0.i2.u31.FB_trans_rs==1))) + ((i5.u35.arm2_release_angle==1)&&(i5.u35.A2U_rot3_run==1))) + ((i5.u35.arm1_pick_up_angle==1)&&(i5.u52.A1L_rot1_run==1))) + ((i7.u59.arm1_retract_ext==1)&&(i7.u59.A1L_ret_run==1))) + (((i7.u59.arm1_retract_ext==1)&&(i7.u55.arm1_forward==1))&&(i7.u58.A1L_ext_run==1))) + ((i7.u59.arm1_retract_ext==1)&&(i7.u61.A1U_ret_run==1))) + ((i5.u36.robot_stop==1)&&(i5.u51.A1L_rot2_in==1))) + ((i5.u36.robot_stop==1)&&(i5.u35.A1U_rot2_in==1))) + ((i2.i2.u48.swivel==1)&&(i4.i1.u33.arm2_waiting_for_swivel_1==1))) + (((i1.u7.press_stop==1)&&(i4.i1.u6.PL_in==1)) * (!(A(((((((i6.u37.arm2_forward==1)&&(i6.u46.A2L_ext_rs==1))||((i5.u36.robot_stop==1)&&(i5.u35.A2U_rot3_in==1)))||((i5.u36.robot_left==1)&&(i5.u53.A1L_rot2_rs==1)))||((i0.i1.u3.ch_FT_free==1)&&(i0.i1.u28.feed_belt_occupied==1)))||((i7.u55.arm1_stop==1)&&(i5.u35.A1U_rotated==1))) U (((((((((((i5.u35.arm2_pick_up_angle==1)&&(i5.u43.A2L_rot1_run==1))||((i4.i2.u34.ch_A2D_full==1)&&(i4.i2.u23.deposit_belt_idle==1)))||((i5.u36.robot_left==1)&&(i5.u52.A1L_rot1_rs==1)))||(((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u54.A1L_rot3_run==1)))||(((i1.u9.press_at_lower_pos==1)&&(i1.u7.press_up==1))&&(i1.u12.PL_lower_run==1)))||((i10.i0.u65.crane_to_belt2==1)&&(i10.i0.u68.CU_trans_rs==1)))||((i3.i0.u16.table_upward==1)&&(i3.i0.u21.TU_lift_rs==1)))||((i5.u36.robot_stop==1)&&(i5.u35.A1U_rot3_in==1)))||(((i0.i2.u32.belt1_light_barrier_false==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u31.FB_trans_run==1)))||((i9.i0.u24.belt2_stop==1)&&(i9.i0.u24.DB_at_end==1))))) + !(AG((((((((((((i5.u35.arm1_pick_up_angle==1)&&(i5.u42.A2L_in==1))||((i2.i1.u14.ch_TA1_free==1)&&(i2.i1.u14.table_ready_for_unloading==1)))||((i5.u35.A2U_in==1)&&(i5.u35.arm2_pick_up_angle==1)))||((i5.u36.robot_left==1)&&(i5.u35.A2U_rot2_rs==1)))||((i3.i1.u22.table_unload_angle==1)&&(i3.i1.u22.TU_rot_run==1)))||((i10.i0.u65.crane_to_belt2==1)&&(i10.i0.u68.CU_trans_rs==1)))||((i5.u35.arm1_pick_up_angle==1)&&(i5.u54.A1L_rot3_run==1)))||((i7.u58.arm1_pick_up_ext==1)&&(i7.u58.A1L_ext_run==1)))||(((i10.i0.u73.crane_above_feed_belt==1)&&(i10.i0.u65.crane_to_belt2==1))&&(i10.i0.u68.CU_trans_run==1)))||((i5.u35.arm2_pick_up_angle==1)&&(i5.u51.A1L_in==1)))))))))
=> equivalent forward existential formula: [((Init * !(EG(!(((((((((((!(EG(!(!(E(TRUE U !((((i0.i0.u13.TL_out==1)||(((i3.i1.u17.table_load_angle==1)&&(i3.i1.u15.table_right==1))&&(i3.i1.u22.TU_rot_run==1)))||(((i0.i2.u32.belt1_light_barrier_false==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u31.FB_trans_run==1))))))))) + ((i0.i2.u30.belt1_start==1)&&(i0.i2.u31.FB_trans_rs==1))) + ((i5.u35.arm2_release_angle==1)&&(i5.u35.A2U_rot3_run==1))) + ((i5.u35.arm1_pick_up_angle==1)&&(i5.u52.A1L_rot1_run==1))) + ((i7.u59.arm1_retract_ext==1)&&(i7.u59.A1L_ret_run==1))) + (((i7.u59.arm1_retract_ext==1)&&(i7.u55.arm1_forward==1))&&(i7.u58.A1L_ext_run==1))) + ((i7.u59.arm1_retract_ext==1)&&(i7.u61.A1U_ret_run==1))) + ((i5.u36.robot_stop==1)&&(i5.u51.A1L_rot2_in==1))) + ((i5.u36.robot_stop==1)&&(i5.u35.A1U_rot2_in==1))) + ((i2.i2.u48.swivel==1)&&(i4.i1.u33.arm2_waiting_for_swivel_1==1))) + (((i1.u7.press_stop==1)&&(i4.i1.u6.PL_in==1)) * (!(!((E(!((((((((((((i5.u35.arm2_pick_up_angle==1)&&(i5.u43.A2L_rot1_run==1))||((i4.i2.u34.ch_A2D_full==1)&&(i4.i2.u23.deposit_belt_idle==1)))||((i5.u36.robot_left==1)&&(i5.u52.A1L_rot1_rs==1)))||(((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u54.A1L_rot3_run==1)))||(((i1.u9.press_at_lower_pos==1)&&(i1.u7.press_up==1))&&(i1.u12.PL_lower_run==1)))||((i10.i0.u65.crane_to_belt2==1)&&(i10.i0.u68.CU_trans_rs==1)))||((i3.i0.u16.table_upward==1)&&(i3.i0.u21.TU_lift_rs==1)))||((i5.u36.robot_stop==1)&&(i5.u35.A1U_rot3_in==1)))||(((i0.i2.u32.belt1_light_barrier_false==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u31.FB_trans_run==1)))||((i9.i0.u24.belt2_stop==1)&&(i9.i0.u24.DB_at_end==1)))) U (!(((((((i6.u37.arm2_forward==1)&&(i6.u46.A2L_ext_rs==1))||((i5.u36.robot_stop==1)&&(i5.u35.A2U_rot3_in==1)))||((i5.u36.robot_left==1)&&(i5.u53.A1L_rot2_rs==1)))||((i0.i1.u3.ch_FT_free==1)&&(i0.i1.u28.feed_belt_occupied==1)))||((i7.u55.arm1_stop==1)&&(i5.u35.A1U_rotated==1)))) * !((((((((((((i5.u35.arm2_pick_up_angle==1)&&(i5.u43.A2L_rot1_run==1))||((i4.i2.u34.ch_A2D_full==1)&&(i4.i2.u23.deposit_belt_idle==1)))||((i5.u36.robot_left==1)&&(i5.u52.A1L_rot1_rs==1)))||(((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u54.A1L_rot3_run==1)))||(((i1.u9.press_at_lower_pos==1)&&(i1.u7.press_up==1))&&(i1.u12.PL_lower_run==1)))||((i10.i0.u65.crane_to_belt2==1)&&(i10.i0.u68.CU_trans_rs==1)))||((i3.i0.u16.table_upward==1)&&(i3.i0.u21.TU_lift_rs==1)))||((i5.u36.robot_stop==1)&&(i5.u35.A1U_rot3_in==1)))||(((i0.i2.u32.belt1_light_barrier_false==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u31.FB_trans_run==1)))||((i9.i0.u24.belt2_stop==1)&&(i9.i0.u24.DB_at_end==1)))))) + EG(!((((((((((((i5.u35.arm2_pick_up_angle==1)&&(i5.u43.A2L_rot1_run==1))||((i4.i2.u34.ch_A2D_full==1)&&(i4.i2.u23.deposit_belt_idle==1)))||((i5.u36.robot_left==1)&&(i5.u52.A1L_rot1_rs==1)))||(((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u54.A1L_rot3_run==1)))||(((i1.u9.press_at_lower_pos==1)&&(i1.u7.press_up==1))&&(i1.u12.PL_lower_run==1)))||((i10.i0.u65.crane_to_belt2==1)&&(i10.i0.u68.CU_trans_rs==1)))||((i3.i0.u16.table_upward==1)&&(i3.i0.u21.TU_lift_rs==1)))||((i5.u36.robot_stop==1)&&(i5.u35.A1U_rot3_in==1)))||(((i0.i2.u32.belt1_light_barrier_false==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u31.FB_trans_run==1)))||((i9.i0.u24.belt2_stop==1)&&(i9.i0.u24.DB_at_end==1)))))))) + !(!(E(TRUE U !((((((((((((i5.u35.arm1_pick_up_angle==1)&&(i5.u42.A2L_in==1))||((i2.i1.u14.ch_TA1_free==1)&&(i2.i1.u14.table_ready_for_unloading==1)))||((i5.u35.A2U_in==1)&&(i5.u35.arm2_pick_up_angle==1)))||((i5.u36.robot_left==1)&&(i5.u35.A2U_rot2_rs==1)))||((i3.i1.u22.table_unload_angle==1)&&(i3.i1.u22.TU_rot_run==1)))||((i10.i0.u65.crane_to_belt2==1)&&(i10.i0.u68.CU_trans_rs==1)))||((i5.u35.arm1_pick_up_angle==1)&&(i5.u54.A1L_rot3_run==1)))||((i7.u58.arm1_pick_up_ext==1)&&(i7.u58.A1L_ext_run==1)))||(((i10.i0.u73.crane_above_feed_belt==1)&&(i10.i0.u65.crane_to_belt2==1))&&(i10.i0.u68.CU_trans_run==1)))||((i5.u35.arm2_pick_up_angle==1)&&(i5.u51.A1L_in==1)))))))))))))) * !(E(!(((((((((((!(EG(!(!(E(TRUE U !((((i0.i0.u13.TL_out==1)||(((i3.i1.u17.table_load_angle==1)&&(i3.i1.u15.table_right==1))&&(i3.i1.u22.TU_rot_run==1)))||(((i0.i2.u32.belt1_light_barrier_false==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u31.FB_trans_run==1))))))))) + ((i0.i2.u30.belt1_start==1)&&(i0.i2.u31.FB_trans_rs==1))) + ((i5.u35.arm2_release_angle==1)&&(i5.u35.A2U_rot3_run==1))) + ((i5.u35.arm1_pick_up_angle==1)&&(i5.u52.A1L_rot1_run==1))) + ((i7.u59.arm1_retract_ext==1)&&(i7.u59.A1L_ret_run==1))) + (((i7.u59.arm1_retract_ext==1)&&(i7.u55.arm1_forward==1))&&(i7.u58.A1L_ext_run==1))) + ((i7.u59.arm1_retract_ext==1)&&(i7.u61.A1U_ret_run==1))) + ((i5.u36.robot_stop==1)&&(i5.u51.A1L_rot2_in==1))) + ((i5.u36.robot_stop==1)&&(i5.u35.A1U_rot2_in==1))) + ((i2.i2.u48.swivel==1)&&(i4.i1.u33.arm2_waiting_for_swivel_1==1))) + (((i1.u7.press_stop==1)&&(i4.i1.u6.PL_in==1)) * (!(!((E(!((((((((((((i5.u35.arm2_pick_up_angle==1)&&(i5.u43.A2L_rot1_run==1))||((i4.i2.u34.ch_A2D_full==1)&&(i4.i2.u23.deposit_belt_idle==1)))||((i5.u36.robot_left==1)&&(i5.u52.A1L_rot1_rs==1)))||(((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u54.A1L_rot3_run==1)))||(((i1.u9.press_at_lower_pos==1)&&(i1.u7.press_up==1))&&(i1.u12.PL_lower_run==1)))||((i10.i0.u65.crane_to_belt2==1)&&(i10.i0.u68.CU_trans_rs==1)))||((i3.i0.u16.table_upward==1)&&(i3.i0.u21.TU_lift_rs==1)))||((i5.u36.robot_stop==1)&&(i5.u35.A1U_rot3_in==1)))||(((i0.i2.u32.belt1_light_barrier_false==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u31.FB_trans_run==1)))||((i9.i0.u24.belt2_stop==1)&&(i9.i0.u24.DB_at_end==1)))) U (!(((((((i6.u37.arm2_forward==1)&&(i6.u46.A2L_ext_rs==1))||((i5.u36.robot_stop==1)&&(i5.u35.A2U_rot3_in==1)))||((i5.u36.robot_left==1)&&(i5.u53.A1L_rot2_rs==1)))||((i0.i1.u3.ch_FT_free==1)&&(i0.i1.u28.feed_belt_occupied==1)))||((i7.u55.arm1_stop==1)&&(i5.u35.A1U_rotated==1)))) * !((((((((((((i5.u35.arm2_pick_up_angle==1)&&(i5.u43.A2L_rot1_run==1))||((i4.i2.u34.ch_A2D_full==1)&&(i4.i2.u23.deposit_belt_idle==1)))||((i5.u36.robot_left==1)&&(i5.u52.A1L_rot1_rs==1)))||(((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u54.A1L_rot3_run==1)))||(((i1.u9.press_at_lower_pos==1)&&(i1.u7.press_up==1))&&(i1.u12.PL_lower_run==1)))||((i10.i0.u65.crane_to_belt2==1)&&(i10.i0.u68.CU_trans_rs==1)))||((i3.i0.u16.table_upward==1)&&(i3.i0.u21.TU_lift_rs==1)))||((i5.u36.robot_stop==1)&&(i5.u35.A1U_rot3_in==1)))||(((i0.i2.u32.belt1_light_barrier_false==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u31.FB_trans_run==1)))||((i9.i0.u24.belt2_stop==1)&&(i9.i0.u24.DB_at_end==1)))))) + EG(!((((((((((((i5.u35.arm2_pick_up_angle==1)&&(i5.u43.A2L_rot1_run==1))||((i4.i2.u34.ch_A2D_full==1)&&(i4.i2.u23.deposit_belt_idle==1)))||((i5.u36.robot_left==1)&&(i5.u52.A1L_rot1_rs==1)))||(((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u54.A1L_rot3_run==1)))||(((i1.u9.press_at_lower_pos==1)&&(i1.u7.press_up==1))&&(i1.u12.PL_lower_run==1)))||((i10.i0.u65.crane_to_belt2==1)&&(i10.i0.u68.CU_trans_rs==1)))||((i3.i0.u16.table_upward==1)&&(i3.i0.u21.TU_lift_rs==1)))||((i5.u36.robot_stop==1)&&(i5.u35.A1U_rot3_in==1)))||(((i0.i2.u32.belt1_light_barrier_false==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u31.FB_trans_run==1)))||((i9.i0.u24.belt2_stop==1)&&(i9.i0.u24.DB_at_end==1)))))))) + !(!(E(TRUE U !((((((((((((i5.u35.arm1_pick_up_angle==1)&&(i5.u42.A2L_in==1))||((i2.i1.u14.ch_TA1_free==1)&&(i2.i1.u14.table_ready_for_unloading==1)))||((i5.u35.A2U_in==1)&&(i5.u35.arm2_pick_up_angle==1)))||((i5.u36.robot_left==1)&&(i5.u35.A2U_rot2_rs==1)))||((i3.i1.u22.table_unload_angle==1)&&(i3.i1.u22.TU_rot_run==1)))||((i10.i0.u65.crane_to_belt2==1)&&(i10.i0.u68.CU_trans_rs==1)))||((i5.u35.arm1_pick_up_angle==1)&&(i5.u54.A1L_rot3_run==1)))||((i7.u58.arm1_pick_up_ext==1)&&(i7.u58.A1L_ext_run==1)))||(((i10.i0.u73.crane_above_feed_belt==1)&&(i10.i0.u65.crane_to_belt2==1))&&(i10.i0.u68.CU_trans_run==1)))||((i5.u35.arm2_pick_up_angle==1)&&(i5.u51.A1L_in==1))))))))))) U (!(!(!((E(!((EG(!(EG(!((((((((((i5.u35.arm1_pick_up_angle==1)&&(i5.u42.A2L_in==1))||(i4.i1.u5.PU_out==1))||((i8.u62.crane_mag_off==1)&&(i8.u71.CL_ready_to_grasp==1)))||((i6.u37.arm2_forward==1)&&(i6.u46.A2L_ext_rs==1)))||(i2.i1.u20.TU_out==1))||((i7.u56.A1_extended==1)&&(i7.u57.arm1_magnet_off==1)))||(((i5.u36.robot_left==1)&&(i5.u35.arm1_release_angle==1))&&(i5.u52.A1L_rot1_run==1)))||((i5.u36.robot_stop==1)&&(i5.u35.A2U_rot1_in==1))))))) + (((((((((((((i8.u63.crane_lower==0)||(i8.u72.CL_lower_rs==0))&&((i3.i1.u17.table_load_angle==0)||(i3.i1.u17.TL_rot_run==0)))&&(((i6.u41.arm2_retract_ext==0)||(i6.u37.arm2_forward==0))||(i6.u40.A2U_ext_run==0)))&&(i0.i0.u19.FB_out==0))&&(((i5.u35.robot_right==0)||(i5.u35.arm2_pick_up_angle==0))||(i5.u35.A2U_rot3_run==0)))&&((i7.u55.arm1_stop==0)||(i5.u35.A1U_rotated==0)))&&((i7.u55.arm1_backward==0)||(i7.u59.A1L_ret_rs==0)))&&((i5.u35.arm1_pick_up_angle==0)||(i5.u53.A1L_rot2_run==0)))&&(((i7.u59.arm1_retract_ext==0)||(i7.u55.arm1_forward==0))||(i7.u60.A1U_ext_run==0)))&&((i7.u55.arm1_backward==0)||(i7.u61.A1U_ret_rs==0)))||((((((((i0.i2.u32.belt1_light_barrier_false==0)||(i0.i2.u32.FB_deliver_run==0))&&(((i5.u35.arm1_pick_up_angle==0)||(i5.u35.robot_right==0))||(i5.u35.A1U_rot1_run==0)))&&(((i3.i1.u17.table_load_angle==0)||(i3.i1.u15.table_right==0))||(i3.i1.u22.TU_rot_run==0)))&&(((i7.u55.arm1_backward==0)||(i7.u60.arm1_release_ext==0))||(i7.u61.A1U_ret_run==0)))&&((i9.i0.u24.belt2_start==0)||(i9.i0.u27.DB_deliver_rs==0)))&&((i8.u69.crane_release_height==0)||(i8.u69.CU_lower_run==0)))&&(i4.i2.u34.A2U_out==0))) * E(TRUE U ((((((((((i5.u36.robot_stop==1)&&(i5.u35.A2U_rot2_in==1))||((i5.u35.arm1_pick_up_angle==1)&&(i5.u52.A1L_rot1_run==1)))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot2_run==1)))||((i5.u36.A1L_rotated==1)&&(i7.u55.arm1_stop==1)))||((i9.i0.u26.belt2_light_barrier_true==1)&&(i9.i0.u26.DB_trans_run==1)))||((i6.u39.arm2_magnet_off==1)&&(i6.u39.A2L_extended==1)))||(((i10.i0.u68.crane_above_deposit_belt==1)&&(i10.i0.u65.crane_to_belt1==1))&&(i10.i0.u73.CL_trans_run==1)))||((i8.u63.crane_lower==1)&&(i8.u69.CU_lower_rs==1)))||(((i6.u41.arm2_retract_ext==1)&&(i6.u37.arm2_forward==1))&&(i6.u46.A2L_ext_run==1))))))) U (!(!(EX(!(!(E(TRUE U !((((((((i0.i1.u29.ch_CF_free==1)&&(i10.i1.u66.crane_storing==1))||((i8.u63.crane_stop_v==1)&&(i10.i1.u66.CU_in==1)))||((i5.u35.A2U_in==1)&&(i5.u35.arm2_pick_up_angle==1)))||(((i3.i0.u21.table_top_pos==1)&&(i3.i0.u16.table_upward==1))&&(i3.i0.u18.TL_lower_run==1)))||((i7.u60.arm1_release_ext==1)&&(i7.u60.A1U_ext_run==1)))||(i2.i2.u49.A1L_out==1))))))))) * !((EG(!(EG(!((((((((((i5.u35.arm1_pick_up_angle==1)&&(i5.u42.A2L_in==1))||(i4.i1.u5.PU_out==1))||((i8.u62.crane_mag_off==1)&&(i8.u71.CL_ready_to_grasp==1)))||((i6.u37.arm2_forward==1)&&(i6.u46.A2L_ext_rs==1)))||(i2.i1.u20.TU_out==1))||((i7.u56.A1_extended==1)&&(i7.u57.arm1_magnet_off==1)))||(((i5.u36.robot_left==1)&&(i5.u35.arm1_release_angle==1))&&(i5.u52.A1L_rot1_run==1)))||((i5.u36.robot_stop==1)&&(i5.u35.A2U_rot1_in==1))))))) + (((((((((((((i8.u63.crane_lower==0)||(i8.u72.CL_lower_rs==0))&&((i3.i1.u17.table_load_angle==0)||(i3.i1.u17.TL_rot_run==0)))&&(((i6.u41.arm2_retract_ext==0)||(i6.u37.arm2_forward==0))||(i6.u40.A2U_ext_run==0)))&&(i0.i0.u19.FB_out==0))&&(((i5.u35.robot_right==0)||(i5.u35.arm2_pick_up_angle==0))||(i5.u35.A2U_rot3_run==0)))&&((i7.u55.arm1_stop==0)||(i5.u35.A1U_rotated==0)))&&((i7.u55.arm1_backward==0)||(i7.u59.A1L_ret_rs==0)))&&((i5.u35.arm1_pick_up_angle==0)||(i5.u53.A1L_rot2_run==0)))&&(((i7.u59.arm1_retract_ext==0)||(i7.u55.arm1_forward==0))||(i7.u60.A1U_ext_run==0)))&&((i7.u55.arm1_backward==0)||(i7.u61.A1U_ret_rs==0)))||((((((((i0.i2.u32.belt1_light_barrier_false==0)||(i0.i2.u32.FB_deliver_run==0))&&(((i5.u35.arm1_pick_up_angle==0)||(i5.u35.robot_right==0))||(i5.u35.A1U_rot1_run==0)))&&(((i3.i1.u17.table_load_angle==0)||(i3.i1.u15.table_right==0))||(i3.i1.u22.TU_rot_run==0)))&&(((i7.u55.arm1_backward==0)||(i7.u60.arm1_release_ext==0))||(i7.u61.A1U_ret_run==0)))&&((i9.i0.u24.belt2_start==0)||(i9.i0.u27.DB_deliver_rs==0)))&&((i8.u69.crane_release_height==0)||(i8.u69.CU_lower_run==0)))&&(i4.i2.u34.A2U_out==0))) * E(TRUE U ((((((((((i5.u36.robot_stop==1)&&(i5.u35.A2U_rot2_in==1))||((i5.u35.arm1_pick_up_angle==1)&&(i5.u52.A1L_rot1_run==1)))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot2_run==1)))||((i5.u36.A1L_rotated==1)&&(i7.u55.arm1_stop==1)))||((i9.i0.u26.belt2_light_barrier_true==1)&&(i9.i0.u26.DB_trans_run==1)))||((i6.u39.arm2_magnet_off==1)&&(i6.u39.A2L_extended==1)))||(((i10.i0.u68.crane_above_deposit_belt==1)&&(i10.i0.u65.crane_to_belt1==1))&&(i10.i0.u73.CL_trans_run==1)))||((i8.u63.crane_lower==1)&&(i8.u69.CU_lower_rs==1)))||(((i6.u41.arm2_retract_ext==1)&&(i6.u37.arm2_forward==1))&&(i6.u46.A2L_ext_run==1))))))))) + EG(!((EG(!(EG(!((((((((((i5.u35.arm1_pick_up_angle==1)&&(i5.u42.A2L_in==1))||(i4.i1.u5.PU_out==1))||((i8.u62.crane_mag_off==1)&&(i8.u71.CL_ready_to_grasp==1)))||((i6.u37.arm2_forward==1)&&(i6.u46.A2L_ext_rs==1)))||(i2.i1.u20.TU_out==1))||((i7.u56.A1_extended==1)&&(i7.u57.arm1_magnet_off==1)))||(((i5.u36.robot_left==1)&&(i5.u35.arm1_release_angle==1))&&(i5.u52.A1L_rot1_run==1)))||((i5.u36.robot_stop==1)&&(i5.u35.A2U_rot1_in==1))))))) + (((((((((((((i8.u63.crane_lower==0)||(i8.u72.CL_lower_rs==0))&&((i3.i1.u17.table_load_angle==0)||(i3.i1.u17.TL_rot_run==0)))&&(((i6.u41.arm2_retract_ext==0)||(i6.u37.arm2_forward==0))||(i6.u40.A2U_ext_run==0)))&&(i0.i0.u19.FB_out==0))&&(((i5.u35.robot_right==0)||(i5.u35.arm2_pick_up_angle==0))||(i5.u35.A2U_rot3_run==0)))&&((i7.u55.arm1_stop==0)||(i5.u35.A1U_rotated==0)))&&((i7.u55.arm1_backward==0)||(i7.u59.A1L_ret_rs==0)))&&((i5.u35.arm1_pick_up_angle==0)||(i5.u53.A1L_rot2_run==0)))&&(((i7.u59.arm1_retract_ext==0)||(i7.u55.arm1_forward==0))||(i7.u60.A1U_ext_run==0)))&&((i7.u55.arm1_backward==0)||(i7.u61.A1U_ret_rs==0)))||((((((((i0.i2.u32.belt1_light_barrier_false==0)||(i0.i2.u32.FB_deliver_run==0))&&(((i5.u35.arm1_pick_up_angle==0)||(i5.u35.robot_right==0))||(i5.u35.A1U_rot1_run==0)))&&(((i3.i1.u17.table_load_angle==0)||(i3.i1.u15.table_right==0))||(i3.i1.u22.TU_rot_run==0)))&&(((i7.u55.arm1_backward==0)||(i7.u60.arm1_release_ext==0))||(i7.u61.A1U_ret_run==0)))&&((i9.i0.u24.belt2_start==0)||(i9.i0.u27.DB_deliver_rs==0)))&&((i8.u69.crane_release_height==0)||(i8.u69.CU_lower_run==0)))&&(i4.i2.u34.A2U_out==0))) * E(TRUE U ((((((((((i5.u36.robot_stop==1)&&(i5.u35.A2U_rot2_in==1))||((i5.u35.arm1_pick_up_angle==1)&&(i5.u52.A1L_rot1_run==1)))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot2_run==1)))||((i5.u36.A1L_rotated==1)&&(i7.u55.arm1_stop==1)))||((i9.i0.u26.belt2_light_barrier_true==1)&&(i9.i0.u26.DB_trans_run==1)))||((i6.u39.arm2_magnet_off==1)&&(i6.u39.A2L_extended==1)))||(((i10.i0.u68.crane_above_deposit_belt==1)&&(i10.i0.u65.crane_to_belt1==1))&&(i10.i0.u73.CL_trans_run==1)))||((i8.u63.crane_lower==1)&&(i8.u69.CU_lower_rs==1)))||(((i6.u41.arm2_retract_ext==1)&&(i6.u37.arm2_forward==1))&&(i6.u46.A2L_ext_run==1)))))))))))) * !(((((((((((!(EG(!(!(E(TRUE U !((((i0.i0.u13.TL_out==1)||(((i3.i1.u17.table_load_angle==1)&&(i3.i1.u15.table_right==1))&&(i3.i1.u22.TU_rot_run==1)))||(((i0.i2.u32.belt1_light_barrier_false==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u31.FB_trans_run==1))))))))) + ((i0.i2.u30.belt1_start==1)&&(i0.i2.u31.FB_trans_rs==1))) + ((i5.u35.arm2_release_angle==1)&&(i5.u35.A2U_rot3_run==1))) + ((i5.u35.arm1_pick_up_angle==1)&&(i5.u52.A1L_rot1_run==1))) + ((i7.u59.arm1_retract_ext==1)&&(i7.u59.A1L_ret_run==1))) + (((i7.u59.arm1_retract_ext==1)&&(i7.u55.arm1_forward==1))&&(i7.u58.A1L_ext_run==1))) + ((i7.u59.arm1_retract_ext==1)&&(i7.u61.A1U_ret_run==1))) + ((i5.u36.robot_stop==1)&&(i5.u51.A1L_rot2_in==1))) + ((i5.u36.robot_stop==1)&&(i5.u35.A1U_rot2_in==1))) + ((i2.i2.u48.swivel==1)&&(i4.i1.u33.arm2_waiting_for_swivel_1==1))) + (((i1.u7.press_stop==1)&&(i4.i1.u6.PL_in==1)) * (!(!((E(!((((((((((((i5.u35.arm2_pick_up_angle==1)&&(i5.u43.A2L_rot1_run==1))||((i4.i2.u34.ch_A2D_full==1)&&(i4.i2.u23.deposit_belt_idle==1)))||((i5.u36.robot_left==1)&&(i5.u52.A1L_rot1_rs==1)))||(((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u54.A1L_rot3_run==1)))||(((i1.u9.press_at_lower_pos==1)&&(i1.u7.press_up==1))&&(i1.u12.PL_lower_run==1)))||((i10.i0.u65.crane_to_belt2==1)&&(i10.i0.u68.CU_trans_rs==1)))||((i3.i0.u16.table_upward==1)&&(i3.i0.u21.TU_lift_rs==1)))||((i5.u36.robot_stop==1)&&(i5.u35.A1U_rot3_in==1)))||(((i0.i2.u32.belt1_light_barrier_false==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u31.FB_trans_run==1)))||((i9.i0.u24.belt2_stop==1)&&(i9.i0.u24.DB_at_end==1)))) U (!(((((((i6.u37.arm2_forward==1)&&(i6.u46.A2L_ext_rs==1))||((i5.u36.robot_stop==1)&&(i5.u35.A2U_rot3_in==1)))||((i5.u36.robot_left==1)&&(i5.u53.A1L_rot2_rs==1)))||((i0.i1.u3.ch_FT_free==1)&&(i0.i1.u28.feed_belt_occupied==1)))||((i7.u55.arm1_stop==1)&&(i5.u35.A1U_rotated==1)))) * !((((((((((((i5.u35.arm2_pick_up_angle==1)&&(i5.u43.A2L_rot1_run==1))||((i4.i2.u34.ch_A2D_full==1)&&(i4.i2.u23.deposit_belt_idle==1)))||((i5.u36.robot_left==1)&&(i5.u52.A1L_rot1_rs==1)))||(((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u54.A1L_rot3_run==1)))||(((i1.u9.press_at_lower_pos==1)&&(i1.u7.press_up==1))&&(i1.u12.PL_lower_run==1)))||((i10.i0.u65.crane_to_belt2==1)&&(i10.i0.u68.CU_trans_rs==1)))||((i3.i0.u16.table_upward==1)&&(i3.i0.u21.TU_lift_rs==1)))||((i5.u36.robot_stop==1)&&(i5.u35.A1U_rot3_in==1)))||(((i0.i2.u32.belt1_light_barrier_false==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u31.FB_trans_run==1)))||((i9.i0.u24.belt2_stop==1)&&(i9.i0.u24.DB_at_end==1)))))) + EG(!((((((((((((i5.u35.arm2_pick_up_angle==1)&&(i5.u43.A2L_rot1_run==1))||((i4.i2.u34.ch_A2D_full==1)&&(i4.i2.u23.deposit_belt_idle==1)))||((i5.u36.robot_left==1)&&(i5.u52.A1L_rot1_rs==1)))||(((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u54.A1L_rot3_run==1)))||(((i1.u9.press_at_lower_pos==1)&&(i1.u7.press_up==1))&&(i1.u12.PL_lower_run==1)))||((i10.i0.u65.crane_to_belt2==1)&&(i10.i0.u68.CU_trans_rs==1)))||((i3.i0.u16.table_upward==1)&&(i3.i0.u21.TU_lift_rs==1)))||((i5.u36.robot_stop==1)&&(i5.u35.A1U_rot3_in==1)))||(((i0.i2.u32.belt1_light_barrier_false==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u31.FB_trans_run==1)))||((i9.i0.u24.belt2_stop==1)&&(i9.i0.u24.DB_at_end==1)))))))) + !(!(E(TRUE U !((((((((((((i5.u35.arm1_pick_up_angle==1)&&(i5.u42.A2L_in==1))||((i2.i1.u14.ch_TA1_free==1)&&(i2.i1.u14.table_ready_for_unloading==1)))||((i5.u35.A2U_in==1)&&(i5.u35.arm2_pick_up_angle==1)))||((i5.u36.robot_left==1)&&(i5.u35.A2U_rot2_rs==1)))||((i3.i1.u22.table_unload_angle==1)&&(i3.i1.u22.TU_rot_run==1)))||((i10.i0.u65.crane_to_belt2==1)&&(i10.i0.u68.CU_trans_rs==1)))||((i5.u35.arm1_pick_up_angle==1)&&(i5.u54.A1L_rot3_run==1)))||((i7.u58.arm1_pick_up_ext==1)&&(i7.u58.A1L_ext_run==1)))||(((i10.i0.u73.crane_above_feed_belt==1)&&(i10.i0.u65.crane_to_belt2==1))&&(i10.i0.u68.CU_trans_run==1)))||((i5.u35.arm2_pick_up_angle==1)&&(i5.u51.A1L_in==1)))))))))))))))] != FALSE
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
(forward)formula 1,0,13.6103,487180,1,0,1.11084e+06,11590,4678,1.11061e+06,1084,47796,1661025
FORMULA ParamProductionCell-PT-3-CTLFireability-01 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL USE_NUPN
Formula is FALSE !
***************************************
original formula: !(E((!(AX(((((((((i10.i0.u73.crane_above_feed_belt==1)&&(i10.i0.u73.CL_trans_run==1))||((i10.i0.u68.crane_above_deposit_belt==1)&&(i10.i0.u68.CU_trans_run==1)))||((i10.i0.u65.crane_stop_h==1)&&(i8.u74.CL_ready_to_transport==1)))||((i3.i0.u21.table_top_pos==1)&&(i3.i0.u21.TU_lift_run==1)))||((i3.i0.u16.table_at_load_angle==1)&&(i3.i0.u16.table_stop_v==1)))||((i0.i0.u19.ch_FT_full==1)&&(i0.i0.u13.table_ready_for_loading==1)))||((i6.u41.arm2_retract_ext==1)&&(i6.u47.A2L_ret_run==1))))) * (!(A((((i8.u72.crane_pick_up_height==1)&&(i8.u72.CL_lower_run==1))&&((((((((((i2.i0.u11.PL_out==1)||((i7.u57.arm1_magnet_on==1)&&(i7.u57.A1U_extendet==1)))||(i4.i1.u5.PU_out==1))||((i8.u62.crane_mag_off==1)&&(i8.u71.CL_ready_to_grasp==1)))||((i6.u41.arm2_retract_ext==1)&&(i6.u41.A2U_ret_run==1)))||((i5.u36.robot_stop==1)&&(i5.u35.A2U_rot3_in==1)))||(i0.i0.u13.TL_out==1))||((i5.u36.robot_stop==1)&&(i5.u51.A1L_rot2_in==1)))||((i4.i1.u5.ch_PA2_full==1)&&(i4.i1.u33.arm2_store_free==1)))||((i3.i1.u22.table_unload_angle==1)&&(i3.i1.u22.TU_rot_run==1)))) U ((((((((((i1.u7.press_upward==1)&&(i1.u10.forge_rs==1))||(i0.i0.u13.TL_out==1))||(((i7.u59.arm1_retract_ext==1)&&(i7.u55.arm1_forward==1))&&(i7.u58.A1L_ext_run==1)))||((i3.i0.u16.table_stop_v==1)&&(i3.i1.u15.table_at_unload_angle==1)))||((i9.i0.u27.belt2_light_barrier_false==1)&&(i9.i0.u27.DB_deliver_run==1)))||((i3.i0.u16.table_at_load_angle==1)&&(i3.i0.u16.table_stop_v==1)))||((i7.u56.A1_extended==1)&&(i7.u57.arm1_magnet_off==1)))||((i7.u55.arm1_forward==1)&&(i7.u60.A1U_ext_rs==1)))||(i4.i0.u4.A2L_out==1)))) + !(EX(AG((((((((((((i0.i2.u30.belt1_stop==1)&&(i0.i1.u3.FB_in==1))||((i5.u35.arm2_release_angle==1)&&(i5.u42.A2L_in==1)))||((i8.u67.crane_transport_height==1)&&(i8.u74.CL_lift_run==1)))||((i2.i1.u14.ch_TA1_free==1)&&(i2.i1.u14.table_ready_for_unloading==1)))||((i5.u36.robot_stop==1)&&(i5.u51.A1L_rot3_in==1)))||(i0.i0.u13.TL_out==1))||(i2.i1.u20.TU_out==1))||((i10.i0.u65.crane_to_belt2==1)&&(i10.i0.u68.CU_trans_rs==1)))||((i2.i1.u14.TL_in==1)&&(i3.i1.u15.table_stop_h==1)))||((i3.i1.u15.table_right==1)&&(i3.i1.u17.TL_rot_rs==1)))))))) U (EF((((((((((((i5.u35.arm2_pick_up_angle==1)&&(i5.u43.A2L_rot1_run==1))||(i9.i1.u1.CU_out==1))||((i5.u35.arm1_pick_up_angle==1)&&(i5.u54.A1L_rot3_run==1)))||(((i5.u36.robot_left==1)&&(i5.u35.arm1_release_angle==1))&&(i5.u35.A2U_rot2_run==1)))||((i3.i0.u16.table_upward==1)&&(i3.i0.u18.TL_lower_rs==1)))||((i0.i0.u19.ch_FT_full==1)&&(i0.i0.u13.table_ready_for_loading==1)))||((i8.u63.crane_lower==1)&&(i8.u69.CU_lower_rs==1)))||((i9.i0.u24.belt2_stop==1)&&(i9.i0.u24.DB_at_end==1)))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot2_run==1)))||(i10.i1.u25.CL_out==1))) * AG(((AG(((((((((i9.i0.u27.belt2_light_barrier_false==1)&&(i9.i0.u24.belt2_start==1))&&(i9.i0.u26.DB_trans_run==1))||(((i6.u37.arm2_backward==1)&&(i6.u46.arm2_pick_up_ext==1))&&(i6.u47.A2L_ret_run==1)))||((i8.u67.crane_transport_height==1)&&(i8.u74.CL_lift_run==1)))||((i6.u40.arm2_release_ext==1)&&(i6.u40.A2U_ext_run==1)))||((i7.u55.arm1_backward==1)&&(i7.u61.A1U_ret_rs==1)))||((i6.u41.arm2_retract_ext==1)&&(i6.u47.A2L_ret_run==1)))) * A((((i8.u69.crane_release_height==1)&&(i8.u69.CU_lower_run==1))||((i0.i2.u30.belt1_stop==1)&&(i0.i2.u30.FB_at_end==1))) U ((((((i5.u35.arm2_release_angle==1)&&(i5.u42.A2L_in==1))||(i0.i0.u19.FB_out==1))||((i5.u36.robot_left==1)&&(i5.u52.A1L_rot1_rs==1)))||((i5.u35.robot_right==1)&&(i5.u35.A1U_rot1_rs==1)))||((i7.u55.arm1_backward==1)&&(i7.u61.A1U_ret_rs==1))))) * E((((((((((i6.u37.arm2_forward==1)&&(i6.u40.A2U_ext_rs==1))||((i4.i0.u2.ch_A2D_free==1)&&(i4.i0.u2.arm2_storing==1)))||((i5.u36.robot_left==1)&&(i5.u35.A1U_rot3_rs==1)))||((i5.u36.robot_stop==1)&&(i5.u35.A1U_rot3_in==1)))||((i3.i0.u16.table_upward==1)&&(i3.i0.u18.TL_lower_rs==1)))||((i5.u35.arm1_release_angle==1)&&(i5.u51.A1L_in==1)))||((i5.u36.robot_stop==1)&&(i5.u42.A2L_rot3_in==1)))||((i5.u35.arm2_pick_up_angle==1)&&(i5.u51.A1L_in==1))) U (((((((((((i5.u36.robot_stop==1)&&(i5.u35.A2U_rot2_in==1))||(((i3.i0.u18.table_bottom_pos==1)&&(i3.i0.u16.table_upward==1))&&(i3.i0.u21.TU_lift_run==1)))||(i2.i1.u20.TU_out==1))||((i8.u62.crane_mag_on==1)&&(i8.u64.CU_ready_to_ungrasp==1)))||(((i5.u35.arm1_pick_up_angle==1)&&(i5.u35.robot_right==1))&&(i5.u35.A2U_rot1_run==1)))||(((i10.i0.u68.crane_above_deposit_belt==1)&&(i10.i0.u65.crane_to_belt1==1))&&(i10.i0.u73.CL_trans_run==1)))||((i5.u35.arm1_pick_up_angle==1)&&(i5.u35.A1U_in==1)))||((i9.i1.u1.ch_CF_full==1)&&(i0.i1.u28.feed_belt_idle==1)))||((i7.u55.arm1_backward==1)&&(i7.u59.A1L_ret_rs==1)))||((i3.i1.u15.table_right==1)&&(i3.i1.u17.TL_rot_rs==1)))))))))
=> equivalent forward existential formula: [((FwdU(Init,(!(!(EX(!(((((((((i10.i0.u73.crane_above_feed_belt==1)&&(i10.i0.u73.CL_trans_run==1))||((i10.i0.u68.crane_above_deposit_belt==1)&&(i10.i0.u68.CU_trans_run==1)))||((i10.i0.u65.crane_stop_h==1)&&(i8.u74.CL_ready_to_transport==1)))||((i3.i0.u21.table_top_pos==1)&&(i3.i0.u21.TU_lift_run==1)))||((i3.i0.u16.table_at_load_angle==1)&&(i3.i0.u16.table_stop_v==1)))||((i0.i0.u19.ch_FT_full==1)&&(i0.i0.u13.table_ready_for_loading==1)))||((i6.u41.arm2_retract_ext==1)&&(i6.u47.A2L_ret_run==1))))))) * (!(!((E(!(((((((((((i1.u7.press_upward==1)&&(i1.u10.forge_rs==1))||(i0.i0.u13.TL_out==1))||(((i7.u59.arm1_retract_ext==1)&&(i7.u55.arm1_forward==1))&&(i7.u58.A1L_ext_run==1)))||((i3.i0.u16.table_stop_v==1)&&(i3.i1.u15.table_at_unload_angle==1)))||((i9.i0.u27.belt2_light_barrier_false==1)&&(i9.i0.u27.DB_deliver_run==1)))||((i3.i0.u16.table_at_load_angle==1)&&(i3.i0.u16.table_stop_v==1)))||((i7.u56.A1_extended==1)&&(i7.u57.arm1_magnet_off==1)))||((i7.u55.arm1_forward==1)&&(i7.u60.A1U_ext_rs==1)))||(i4.i0.u4.A2L_out==1))) U (!((((i8.u72.crane_pick_up_height==1)&&(i8.u72.CL_lower_run==1))&&((((((((((i2.i0.u11.PL_out==1)||((i7.u57.arm1_magnet_on==1)&&(i7.u57.A1U_extendet==1)))||(i4.i1.u5.PU_out==1))||((i8.u62.crane_mag_off==1)&&(i8.u71.CL_ready_to_grasp==1)))||((i6.u41.arm2_retract_ext==1)&&(i6.u41.A2U_ret_run==1)))||((i5.u36.robot_stop==1)&&(i5.u35.A2U_rot3_in==1)))||(i0.i0.u13.TL_out==1))||((i5.u36.robot_stop==1)&&(i5.u51.A1L_rot2_in==1)))||((i4.i1.u5.ch_PA2_full==1)&&(i4.i1.u33.arm2_store_free==1)))||((i3.i1.u22.table_unload_angle==1)&&(i3.i1.u22.TU_rot_run==1))))) * !(((((((((((i1.u7.press_upward==1)&&(i1.u10.forge_rs==1))||(i0.i0.u13.TL_out==1))||(((i7.u59.arm1_retract_ext==1)&&(i7.u55.arm1_forward==1))&&(i7.u58.A1L_ext_run==1)))||((i3.i0.u16.table_stop_v==1)&&(i3.i1.u15.table_at_unload_angle==1)))||((i9.i0.u27.belt2_light_barrier_false==1)&&(i9.i0.u27.DB_deliver_run==1)))||((i3.i0.u16.table_at_load_angle==1)&&(i3.i0.u16.table_stop_v==1)))||((i7.u56.A1_extended==1)&&(i7.u57.arm1_magnet_off==1)))||((i7.u55.arm1_forward==1)&&(i7.u60.A1U_ext_rs==1)))||(i4.i0.u4.A2L_out==1))))) + EG(!(((((((((((i1.u7.press_upward==1)&&(i1.u10.forge_rs==1))||(i0.i0.u13.TL_out==1))||(((i7.u59.arm1_retract_ext==1)&&(i7.u55.arm1_forward==1))&&(i7.u58.A1L_ext_run==1)))||((i3.i0.u16.table_stop_v==1)&&(i3.i1.u15.table_at_unload_angle==1)))||((i9.i0.u27.belt2_light_barrier_false==1)&&(i9.i0.u27.DB_deliver_run==1)))||((i3.i0.u16.table_at_load_angle==1)&&(i3.i0.u16.table_stop_v==1)))||((i7.u56.A1_extended==1)&&(i7.u57.arm1_magnet_off==1)))||((i7.u55.arm1_forward==1)&&(i7.u60.A1U_ext_rs==1)))||(i4.i0.u4.A2L_out==1))))))) + !(EX(!(E(TRUE U !((((((((((((i0.i2.u30.belt1_stop==1)&&(i0.i1.u3.FB_in==1))||((i5.u35.arm2_release_angle==1)&&(i5.u42.A2L_in==1)))||((i8.u67.crane_transport_height==1)&&(i8.u74.CL_lift_run==1)))||((i2.i1.u14.ch_TA1_free==1)&&(i2.i1.u14.table_ready_for_unloading==1)))||((i5.u36.robot_stop==1)&&(i5.u51.A1L_rot3_in==1)))||(i0.i0.u13.TL_out==1))||(i2.i1.u20.TU_out==1))||((i10.i0.u65.crane_to_belt2==1)&&(i10.i0.u68.CU_trans_rs==1)))||((i2.i1.u14.TL_in==1)&&(i3.i1.u15.table_stop_h==1)))||((i3.i1.u15.table_right==1)&&(i3.i1.u17.TL_rot_rs==1))))))))))) * E(TRUE U (((((((((((i5.u35.arm2_pick_up_angle==1)&&(i5.u43.A2L_rot1_run==1))||(i9.i1.u1.CU_out==1))||((i5.u35.arm1_pick_up_angle==1)&&(i5.u54.A1L_rot3_run==1)))||(((i5.u36.robot_left==1)&&(i5.u35.arm1_release_angle==1))&&(i5.u35.A2U_rot2_run==1)))||((i3.i0.u16.table_upward==1)&&(i3.i0.u18.TL_lower_rs==1)))||((i0.i0.u19.ch_FT_full==1)&&(i0.i0.u13.table_ready_for_loading==1)))||((i8.u63.crane_lower==1)&&(i8.u69.CU_lower_rs==1)))||((i9.i0.u24.belt2_stop==1)&&(i9.i0.u24.DB_at_end==1)))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot2_run==1)))||(i10.i1.u25.CL_out==1)))) * !(E(TRUE U !(((!(E(TRUE U !(((((((((i9.i0.u27.belt2_light_barrier_false==1)&&(i9.i0.u24.belt2_start==1))&&(i9.i0.u26.DB_trans_run==1))||(((i6.u37.arm2_backward==1)&&(i6.u46.arm2_pick_up_ext==1))&&(i6.u47.A2L_ret_run==1)))||((i8.u67.crane_transport_height==1)&&(i8.u74.CL_lift_run==1)))||((i6.u40.arm2_release_ext==1)&&(i6.u40.A2U_ext_run==1)))||((i7.u55.arm1_backward==1)&&(i7.u61.A1U_ret_rs==1)))||((i6.u41.arm2_retract_ext==1)&&(i6.u47.A2L_ret_run==1)))))) * !((E(!(((((((i5.u35.arm2_release_angle==1)&&(i5.u42.A2L_in==1))||(i0.i0.u19.FB_out==1))||((i5.u36.robot_left==1)&&(i5.u52.A1L_rot1_rs==1)))||((i5.u35.robot_right==1)&&(i5.u35.A1U_rot1_rs==1)))||((i7.u55.arm1_backward==1)&&(i7.u61.A1U_ret_rs==1)))) U (!((((i8.u69.crane_release_height==1)&&(i8.u69.CU_lower_run==1))||((i0.i2.u30.belt1_stop==1)&&(i0.i2.u30.FB_at_end==1)))) * !(((((((i5.u35.arm2_release_angle==1)&&(i5.u42.A2L_in==1))||(i0.i0.u19.FB_out==1))||((i5.u36.robot_left==1)&&(i5.u52.A1L_rot1_rs==1)))||((i5.u35.robot_right==1)&&(i5.u35.A1U_rot1_rs==1)))||((i7.u55.arm1_backward==1)&&(i7.u61.A1U_ret_rs==1)))))) + EG(!(((((((i5.u35.arm2_release_angle==1)&&(i5.u42.A2L_in==1))||(i0.i0.u19.FB_out==1))||((i5.u36.robot_left==1)&&(i5.u52.A1L_rot1_rs==1)))||((i5.u35.robot_right==1)&&(i5.u35.A1U_rot1_rs==1)))||((i7.u55.arm1_backward==1)&&(i7.u61.A1U_ret_rs==1)))))))) * E((((((((((i6.u37.arm2_forward==1)&&(i6.u40.A2U_ext_rs==1))||((i4.i0.u2.ch_A2D_free==1)&&(i4.i0.u2.arm2_storing==1)))||((i5.u36.robot_left==1)&&(i5.u35.A1U_rot3_rs==1)))||((i5.u36.robot_stop==1)&&(i5.u35.A1U_rot3_in==1)))||((i3.i0.u16.table_upward==1)&&(i3.i0.u18.TL_lower_rs==1)))||((i5.u35.arm1_release_angle==1)&&(i5.u51.A1L_in==1)))||((i5.u36.robot_stop==1)&&(i5.u42.A2L_rot3_in==1)))||((i5.u35.arm2_pick_up_angle==1)&&(i5.u51.A1L_in==1))) U (((((((((((i5.u36.robot_stop==1)&&(i5.u35.A2U_rot2_in==1))||(((i3.i0.u18.table_bottom_pos==1)&&(i3.i0.u16.table_upward==1))&&(i3.i0.u21.TU_lift_run==1)))||(i2.i1.u20.TU_out==1))||((i8.u62.crane_mag_on==1)&&(i8.u64.CU_ready_to_ungrasp==1)))||(((i5.u35.arm1_pick_up_angle==1)&&(i5.u35.robot_right==1))&&(i5.u35.A2U_rot1_run==1)))||(((i10.i0.u68.crane_above_deposit_belt==1)&&(i10.i0.u65.crane_to_belt1==1))&&(i10.i0.u73.CL_trans_run==1)))||((i5.u35.arm1_pick_up_angle==1)&&(i5.u35.A1U_in==1)))||((i9.i1.u1.ch_CF_full==1)&&(i0.i1.u28.feed_belt_idle==1)))||((i7.u55.arm1_backward==1)&&(i7.u59.A1L_ret_rs==1)))||((i3.i1.u15.table_right==1)&&(i3.i1.u17.TL_rot_rs==1)))))))))] = FALSE
(forward)formula 2,1,15.8948,573972,1,0,1.30058e+06,13382,4918,1.28583e+06,1091,57428,1903095
FORMULA ParamProductionCell-PT-3-CTLFireability-02 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL USE_NUPN
Formula is TRUE !
***************************************
original formula: !(EX(AX((AF((((((i8.u67.crane_transport_height==1)&&(i8.u67.CU_lift_run==1))||((i5.u36.robot_stop==1)&&(i5.u51.A1L_rot2_in==1)))||(((i10.i0.u68.crane_above_deposit_belt==1)&&(i10.i0.u65.crane_to_belt1==1))&&(i10.i0.u73.CL_trans_run==1)))&&(((((((((((i5.u35.arm2_release_angle==1)&&(i5.u35.A1U_in==1))||(((i8.u67.crane_transport_height==1)&&(i8.u63.crane_lower==1))&&(i8.u72.CL_lower_run==1)))||((i2.i2.u48.swivel==1)&&(i2.i1.u20.arm1_waiting_for_swivel_1==1)))||((i1.u7.press_stop==1)&&(i4.i1.u6.PL_in==1)))||((i7.u59.arm1_retract_ext==1)&&(i7.u61.A1U_ret_run==1)))||((i6.u46.arm2_pick_up_ext==1)&&(i6.u46.A2L_ext_run==1)))||((i5.u36.robot_stop==1)&&(i5.u51.A1L_rot2_in==1)))||((i2.i0.u50.ch_A1P_free==1)&&(i2.i0.u50.arm1_storing==1)))||(((i5.u35.arm1_pick_up_angle==1)&&(i5.u36.robot_left==1))&&(i5.u43.A2L_rot1_run==1)))||((i7.u55.arm1_stop==1)&&(i7.u57.A1U_unloadet==1))))) + (!(A((((i6.u37.arm2_forward==1)&&(i6.u46.A2L_ext_rs==1))||((i9.i0.u27.belt2_light_barrier_false==1)&&(i9.i0.u27.DB_deliver_run==1))) U ((((((((((((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u35.A1U_rot3_run==1))||(((i1.u7.press_upward==1)&&(i1.u12.press_at_middle_pos==1))&&(i1.u10.forge_run==1)))||((i8.u67.crane_transport_height==1)&&(i8.u74.CL_lift_run==1)))||((i6.u38.A2U_extended==1)&&(i6.u39.arm2_magnet_on==1)))||((i0.i1.u3.ch_FT_free==1)&&(i0.i1.u28.feed_belt_occupied==1)))||(((i5.u35.arm1_pick_up_angle==1)&&(i5.u35.robot_right==1))&&(i5.u35.A2U_rot1_run==1)))||((i5.u36.robot_left==1)&&(i5.u52.A1L_rot1_rs==1)))||((i6.u40.arm2_release_ext==1)&&(i6.u40.A2U_ext_run==1)))||((i5.u35.arm1_release_angle==1)&&(i5.u51.A1L_in==1)))||((i0.i2.u30.belt1_stop==1)&&(i0.i2.u30.FB_at_end==1))))) * (((i6.u39.arm2_magnet_off==1)&&(i6.u39.A2L_extended==1))||((i7.u55.arm1_stop==1)&&(i5.u35.A1U_rotated==1))))))))
=> equivalent forward existential formula: [(EY(Init) * !(EX(!((!(EG(!((((((i8.u67.crane_transport_height==1)&&(i8.u67.CU_lift_run==1))||((i5.u36.robot_stop==1)&&(i5.u51.A1L_rot2_in==1)))||(((i10.i0.u68.crane_above_deposit_belt==1)&&(i10.i0.u65.crane_to_belt1==1))&&(i10.i0.u73.CL_trans_run==1)))&&(((((((((((i5.u35.arm2_release_angle==1)&&(i5.u35.A1U_in==1))||(((i8.u67.crane_transport_height==1)&&(i8.u63.crane_lower==1))&&(i8.u72.CL_lower_run==1)))||((i2.i2.u48.swivel==1)&&(i2.i1.u20.arm1_waiting_for_swivel_1==1)))||((i1.u7.press_stop==1)&&(i4.i1.u6.PL_in==1)))||((i7.u59.arm1_retract_ext==1)&&(i7.u61.A1U_ret_run==1)))||((i6.u46.arm2_pick_up_ext==1)&&(i6.u46.A2L_ext_run==1)))||((i5.u36.robot_stop==1)&&(i5.u51.A1L_rot2_in==1)))||((i2.i0.u50.ch_A1P_free==1)&&(i2.i0.u50.arm1_storing==1)))||(((i5.u35.arm1_pick_up_angle==1)&&(i5.u36.robot_left==1))&&(i5.u43.A2L_rot1_run==1)))||((i7.u55.arm1_stop==1)&&(i7.u57.A1U_unloadet==1))))))) + (!(!((E(!(((((((((((((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u35.A1U_rot3_run==1))||(((i1.u7.press_upward==1)&&(i1.u12.press_at_middle_pos==1))&&(i1.u10.forge_run==1)))||((i8.u67.crane_transport_height==1)&&(i8.u74.CL_lift_run==1)))||((i6.u38.A2U_extended==1)&&(i6.u39.arm2_magnet_on==1)))||((i0.i1.u3.ch_FT_free==1)&&(i0.i1.u28.feed_belt_occupied==1)))||(((i5.u35.arm1_pick_up_angle==1)&&(i5.u35.robot_right==1))&&(i5.u35.A2U_rot1_run==1)))||((i5.u36.robot_left==1)&&(i5.u52.A1L_rot1_rs==1)))||((i6.u40.arm2_release_ext==1)&&(i6.u40.A2U_ext_run==1)))||((i5.u35.arm1_release_angle==1)&&(i5.u51.A1L_in==1)))||((i0.i2.u30.belt1_stop==1)&&(i0.i2.u30.FB_at_end==1)))) U (!((((i6.u37.arm2_forward==1)&&(i6.u46.A2L_ext_rs==1))||((i9.i0.u27.belt2_light_barrier_false==1)&&(i9.i0.u27.DB_deliver_run==1)))) * !(((((((((((((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u35.A1U_rot3_run==1))||(((i1.u7.press_upward==1)&&(i1.u12.press_at_middle_pos==1))&&(i1.u10.forge_run==1)))||((i8.u67.crane_transport_height==1)&&(i8.u74.CL_lift_run==1)))||((i6.u38.A2U_extended==1)&&(i6.u39.arm2_magnet_on==1)))||((i0.i1.u3.ch_FT_free==1)&&(i0.i1.u28.feed_belt_occupied==1)))||(((i5.u35.arm1_pick_up_angle==1)&&(i5.u35.robot_right==1))&&(i5.u35.A2U_rot1_run==1)))||((i5.u36.robot_left==1)&&(i5.u52.A1L_rot1_rs==1)))||((i6.u40.arm2_release_ext==1)&&(i6.u40.A2U_ext_run==1)))||((i5.u35.arm1_release_angle==1)&&(i5.u51.A1L_in==1)))||((i0.i2.u30.belt1_stop==1)&&(i0.i2.u30.FB_at_end==1)))))) + EG(!(((((((((((((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u35.A1U_rot3_run==1))||(((i1.u7.press_upward==1)&&(i1.u12.press_at_middle_pos==1))&&(i1.u10.forge_run==1)))||((i8.u67.crane_transport_height==1)&&(i8.u74.CL_lift_run==1)))||((i6.u38.A2U_extended==1)&&(i6.u39.arm2_magnet_on==1)))||((i0.i1.u3.ch_FT_free==1)&&(i0.i1.u28.feed_belt_occupied==1)))||(((i5.u35.arm1_pick_up_angle==1)&&(i5.u35.robot_right==1))&&(i5.u35.A2U_rot1_run==1)))||((i5.u36.robot_left==1)&&(i5.u52.A1L_rot1_rs==1)))||((i6.u40.arm2_release_ext==1)&&(i6.u40.A2U_ext_run==1)))||((i5.u35.arm1_release_angle==1)&&(i5.u51.A1L_in==1)))||((i0.i2.u30.belt1_stop==1)&&(i0.i2.u30.FB_at_end==1)))))))) * (((i6.u39.arm2_magnet_off==1)&&(i6.u39.A2L_extended==1))||((i7.u55.arm1_stop==1)&&(i5.u35.A1U_rotated==1)))))))))] = FALSE
(forward)formula 3,1,18.0459,648156,1,0,1.46463e+06,13464,5086,1.43185e+06,1098,58271,2112906
FORMULA ParamProductionCell-PT-3-CTLFireability-04 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL USE_NUPN
Formula is TRUE !
***************************************
original formula: !(EX(!(AF(EX((((((((i0.i2.u30.belt1_stop==1)&&(i0.i1.u3.FB_in==1))||((i5.u36.robot_left==1)&&(i5.u52.A1L_rot1_rs==1)))||((i5.u36.robot_left==1)&&(i5.u45.A2L_rot3_rs==1)))||((i7.u56.A1_extended==1)&&(i7.u57.arm1_magnet_off==1)))||((i1.u12.press_at_middle_pos==1)&&(i1.u12.PL_lower_run==1)))&&(((((i10.i0.u68.crane_above_deposit_belt==1)&&(i10.i0.u68.CU_trans_run==1))||((i5.u36.robot_stop==1)&&(i5.u51.A1L_rot3_in==1)))||((i9.i0.u24.belt2_start==1)&&(i9.i0.u26.DB_trans_rs==1)))||((i1.u9.press_at_lower_pos==1)&&(i1.u9.PU_lower_run==1)))))))))
=> equivalent forward existential formula: [FwdG(EY(Init),!(EX((((((((i0.i2.u30.belt1_stop==1)&&(i0.i1.u3.FB_in==1))||((i5.u36.robot_left==1)&&(i5.u52.A1L_rot1_rs==1)))||((i5.u36.robot_left==1)&&(i5.u45.A2L_rot3_rs==1)))||((i7.u56.A1_extended==1)&&(i7.u57.arm1_magnet_off==1)))||((i1.u12.press_at_middle_pos==1)&&(i1.u12.PL_lower_run==1)))&&(((((i10.i0.u68.crane_above_deposit_belt==1)&&(i10.i0.u68.CU_trans_run==1))||((i5.u36.robot_stop==1)&&(i5.u51.A1L_rot3_in==1)))||((i9.i0.u24.belt2_start==1)&&(i9.i0.u26.DB_trans_rs==1)))||((i1.u9.press_at_lower_pos==1)&&(i1.u9.PU_lower_run==1)))))))] = FALSE
(forward)formula 4,0,20.7579,739500,1,0,1.66641e+06,13464,5120,1.61393e+06,1098,58271,2417372
FORMULA ParamProductionCell-PT-3-CTLFireability-06 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL USE_NUPN
Formula is FALSE !
***************************************
original formula: EF((!(AX(EF((((((((((i0.i2.u30.belt1_start==1)&&(i0.i2.u31.FB_trans_rs==1))||((i8.u63.crane_stop_v==1)&&(i8.u71.CL_loaded==1)))||((i5.u36.robot_stop==1)&&(i5.u35.A2U_rot3_in==1)))||((i3.i0.u21.table_top_pos==1)&&(i3.i0.u21.TU_lift_run==1)))||((i5.u36.robot_left==1)&&(i5.u35.A2U_rot2_rs==1)))||(((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u54.A1L_rot3_run==1)))||((i5.u36.robot_stop==1)&&(i5.u42.A2L_rot1_in==1)))||((i5.u36.robot_stop==1)&&(i5.u42.A2L_rot2_in==1)))))) * !(AF((((((((i5.u35.arm2_release_angle==0)||(i5.u35.A1U_in==0))&&((i5.u35.robot_right==0)||(i5.u35.A1U_rot2_rs==0)))&&((i6.u40.arm2_release_ext==0)||(i6.u40.A2U_ext_run==0)))&&((i10.i0.u65.crane_to_belt2==0)||(i10.i0.u68.CU_trans_rs==0)))&&(i4.i2.u23.deposit_belt_empty==0))&&(((i5.u36.robot_left==0)||(i5.u35.arm1_release_angle==0))||(i5.u35.A2U_rot2_run==0)))))))
=> equivalent forward existential formula: [FwdG((FwdU(Init,TRUE) * !(!(EX(!(E(TRUE U (((((((((i0.i2.u30.belt1_start==1)&&(i0.i2.u31.FB_trans_rs==1))||((i8.u63.crane_stop_v==1)&&(i8.u71.CL_loaded==1)))||((i5.u36.robot_stop==1)&&(i5.u35.A2U_rot3_in==1)))||((i3.i0.u21.table_top_pos==1)&&(i3.i0.u21.TU_lift_run==1)))||((i5.u36.robot_left==1)&&(i5.u35.A2U_rot2_rs==1)))||(((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u54.A1L_rot3_run==1)))||((i5.u36.robot_stop==1)&&(i5.u42.A2L_rot1_in==1)))||((i5.u36.robot_stop==1)&&(i5.u42.A2L_rot2_in==1))))))))),!((((((((i5.u35.arm2_release_angle==0)||(i5.u35.A1U_in==0))&&((i5.u35.robot_right==0)||(i5.u35.A1U_rot2_rs==0)))&&((i6.u40.arm2_release_ext==0)||(i6.u40.A2U_ext_run==0)))&&((i10.i0.u65.crane_to_belt2==0)||(i10.i0.u68.CU_trans_rs==0)))&&(i4.i2.u23.deposit_belt_empty==0))&&(((i5.u36.robot_left==0)||(i5.u35.arm1_release_angle==0))||(i5.u35.A2U_rot2_run==0)))))] != FALSE
(forward)formula 5,0,21.7386,747732,1,0,1.68116e+06,13494,5230,1.63395e+06,1108,58536,2444812
FORMULA ParamProductionCell-PT-3-CTLFireability-10 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL USE_NUPN
Formula is FALSE !
***************************************
original formula: AX((!(AF(EG((((i3.i1.u17.table_load_angle==1)&&(i3.i1.u17.TL_rot_run==1))||((i5.u35.A2U_in==1)&&(i5.u35.arm2_pick_up_angle==1)))))) * !(AX(((i5.u36.robot_left==1)&&(i5.u52.A1L_rot1_rs==1))))))
=> equivalent forward existential formula: ([(EY(Init) * !(EG(!(EG((((i3.i1.u17.table_load_angle==1)&&(i3.i1.u17.TL_rot_run==1))||((i5.u35.A2U_in==1)&&(i5.u35.arm2_pick_up_angle==1))))))))] = FALSE * [(EY(Init) * !(EX(!(((i5.u36.robot_left==1)&&(i5.u52.A1L_rot1_rs==1))))))] = FALSE)
(forward)formula 6,1,22.9129,778800,1,0,1.766e+06,13512,5250,1.68403e+06,1108,58699,2543301
FORMULA ParamProductionCell-PT-3-CTLFireability-11 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL USE_NUPN
Formula is TRUE !
***************************************
original formula: (EF((E(((i6.u37.arm2_stop==0)||(i6.u39.A2L_loaded==0)) U AX((((((((i2.i2.u48.swivel==1)&&(i4.i0.u2.arm2_waiting_for_swivel_2==1))||((i5.u35.arm2_release_angle==1)&&(i5.u35.A2U_rot2_run==1)))||((i8.u72.crane_pick_up_height==1)&&(i8.u72.CL_lower_run==1)))||(((i1.u9.press_at_lower_pos==1)&&(i1.u7.press_up==1))&&(i1.u12.PL_lower_run==1)))||(((i0.i2.u32.belt1_light_barrier_false==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u31.FB_trans_run==1)))||((i7.u55.arm1_backward==1)&&(i7.u61.A1U_ret_rs==1))))) * AG((((((i1.u7.press_upward==0)||(i1.u10.forge_rs==0))&&((i5.u35.A2U_in==0)||(i5.u35.arm1_release_angle==0)))&&((i5.u36.robot_left==0)||(i5.u35.A2U_rot2_rs==0)))&&((i5.u35.arm1_release_angle==0)||(i5.u51.A1L_in==0)))))) + !(EF(((((((((i5.u35.arm2_release_angle==0)||(i5.u36.robot_left==0))||(i5.u35.A1U_rot3_run==0))&&((i8.u63.crane_lower==0)||(i8.u72.CL_lower_rs==0)))&&((i5.u35.arm2_pick_up_angle==0)||(i5.u44.A2L_rot2_run==0)))&&((i4.i2.u34.ch_A2D_full==0)||(i4.i2.u23.deposit_belt_idle==0)))&&((i9.i1.u0.ch_DC_full==0)||(i9.i1.u70.crane_store_free==0)))&&((i3.i0.u18.table_bottom_pos==0)||(i3.i0.u18.TL_lower_run==0))))))
=> equivalent forward existential formula: [(FwdU((Init * !(E(TRUE U (E(((i6.u37.arm2_stop==0)||(i6.u39.A2L_loaded==0)) U !(EX(!((((((((i2.i2.u48.swivel==1)&&(i4.i0.u2.arm2_waiting_for_swivel_2==1))||((i5.u35.arm2_release_angle==1)&&(i5.u35.A2U_rot2_run==1)))||((i8.u72.crane_pick_up_height==1)&&(i8.u72.CL_lower_run==1)))||(((i1.u9.press_at_lower_pos==1)&&(i1.u7.press_up==1))&&(i1.u12.PL_lower_run==1)))||(((i0.i2.u32.belt1_light_barrier_false==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u31.FB_trans_run==1)))||((i7.u55.arm1_backward==1)&&(i7.u61.A1U_ret_rs==1))))))) * !(E(TRUE U !((((((i1.u7.press_upward==0)||(i1.u10.forge_rs==0))&&((i5.u35.A2U_in==0)||(i5.u35.arm1_release_angle==0)))&&((i5.u36.robot_left==0)||(i5.u35.A2U_rot2_rs==0)))&&((i5.u35.arm1_release_angle==0)||(i5.u51.A1L_in==0)))))))))),TRUE) * ((((((((i5.u35.arm2_release_angle==0)||(i5.u36.robot_left==0))||(i5.u35.A1U_rot3_run==0))&&((i8.u63.crane_lower==0)||(i8.u72.CL_lower_rs==0)))&&((i5.u35.arm2_pick_up_angle==0)||(i5.u44.A2L_rot2_run==0)))&&((i4.i2.u34.ch_A2D_full==0)||(i4.i2.u23.deposit_belt_idle==0)))&&((i9.i1.u0.ch_DC_full==0)||(i9.i1.u70.crane_store_free==0)))&&((i3.i0.u18.table_bottom_pos==0)||(i3.i0.u18.TL_lower_run==0))))] = FALSE
(forward)formula 7,0,23.4116,797544,1,0,1.8038e+06,18297,5816,1.72436e+06,1153,77686,2634137
FORMULA ParamProductionCell-PT-3-CTLFireability-12 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL USE_NUPN
Formula is FALSE !
***************************************
original formula: !(AG(AX(AG(!(AX(((((((((i5.u35.A2U_in==1)&&(i5.u35.arm2_pick_up_angle==1))||((i9.i0.u24.belt2_stop==1)&&(i10.i1.u25.DB_in==1)))||((i6.u40.arm2_release_ext==1)&&(i6.u40.A2U_ext_run==1)))||(((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u32.FB_deliver_run==1)))||((i8.u69.crane_release_height==1)&&(i8.u69.CU_lower_run==1)))||(i4.i2.u34.A2U_out==1))||((i5.u36.robot_stop==1)&&(i5.u35.A1U_rot1_in==1)))))))))
=> equivalent forward existential formula: [(FwdU(EY(FwdU(Init,TRUE)),TRUE) * !(EX(!(((((((((i5.u35.A2U_in==1)&&(i5.u35.arm2_pick_up_angle==1))||((i9.i0.u24.belt2_stop==1)&&(i10.i1.u25.DB_in==1)))||((i6.u40.arm2_release_ext==1)&&(i6.u40.A2U_ext_run==1)))||(((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u32.FB_deliver_run==1)))||((i8.u69.crane_release_height==1)&&(i8.u69.CU_lower_run==1)))||(i4.i2.u34.A2U_out==1))||((i5.u36.robot_stop==1)&&(i5.u35.A1U_rot1_in==1)))))))] != FALSE
(forward)formula 8,1,23.4338,798336,1,0,1.80522e+06,18492,5857,1.72693e+06,1154,78551,2636703
FORMULA ParamProductionCell-PT-3-CTLFireability-13 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL USE_NUPN
Formula is TRUE !
***************************************
original formula: AG((((EG((((((((((((i0.i0.u19.FB_out==0)&&((i2.i2.u48.swivel==0)||(i2.i1.u20.arm1_waiting_for_swivel_1==0)))&&((i5.u35.arm2_pick_up_angle==0)||(i5.u35.A1U_in==0)))&&((i5.u36.robot_left==0)||(i5.u52.A1L_rot1_rs==0)))&&((i3.i1.u22.table_unload_angle==0)||(i3.i1.u22.TU_rot_run==0)))&&((i6.u37.arm2_backward==0)||(i6.u47.A2L_ret_rs==0)))&&((i5.u35.arm2_release_angle==0)||(i5.u35.A2U_rot1_run==0)))&&((i5.u35.arm1_release_angle==0)||(i5.u42.A2L_in==0)))&&((i3.i0.u16.table_stop_v==0)||(i3.i1.u15.table_at_unload_angle==0)))&&((i1.u9.press_at_lower_pos==0)||(i1.u9.PU_lower_run==0)))&&((i5.u36.robot_stop==0)||(i5.u35.A1U_rot1_in==0)))) + A((((((((((((((i4.i1.u5.PU_out==1)||((i3.i1.u17.table_load_angle==1)&&(i3.i1.u17.TL_rot_run==1)))||((i5.u36.robot_stop==1)&&(i5.u42.A2L_rot1_in==1)))||(((i3.i0.u21.table_top_pos==1)&&(i3.i0.u16.table_upward==1))&&(i3.i0.u18.TL_lower_run==1)))||((i9.i0.u24.belt2_start==1)&&(i9.i0.u27.DB_deliver_rs==1)))||((i5.u35.robot_right==1)&&(i5.u35.A2U_rot3_rs==1)))||((i7.u55.arm1_forward==1)&&(i7.u60.A1U_ext_rs==1)))||(((i0.i2.u32.belt1_light_barrier_false==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u31.FB_trans_run==1)))||((i9.i0.u24.belt2_stop==1)&&(i9.i0.u24.DB_at_end==1)))&&(((((((((i5.u35.robot_right==1)&&(i5.u35.arm2_pick_up_angle==1))&&(i5.u35.A1U_rot2_run==1))||(i2.i1.u20.TU_out==1))||((i8.u63.crane_lift==1)&&(i8.u74.CL_lift_rs==1)))||((i10.i1.u25.ch_DC_free==1)&&(i4.i2.u23.deposit_belt_occupied==1)))||((i1.u7.press_stop==1)&&(i1.u7.blank_forged==1)))||(((i7.u58.arm1_pick_up_ext==1)&&(i7.u55.arm1_backward==1))&&(i7.u59.A1L_ret_run==1)))||((i7.u55.arm1_backward==1)&&(i7.u61.A1U_ret_rs==1))))&&((i8.u63.crane_lower==0)||(i8.u72.CL_lower_rs==0)))&&((i10.i0.u65.CU_ready_to_transport==0)||(i10.i0.u65.crane_stop_h==0)))&&((i2.i2.u48.swivel==0)||(i2.i0.u50.arm1_waiting_for_swivel_2==0))) U !(AX((((((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u35.A1U_rot3_run==1))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot3_run==1)))||((i3.i0.u16.table_at_load_angle==1)&&(i3.i0.u16.table_stop_v==1))))))) + ((((((((((AF(((((((((((i3.i1.u22.table_unload_angle==1)&&(i3.i1.u15.table_right==1))&&(i3.i1.u17.TL_rot_run==1))||(i2.i2.u48.arm1_having_swivel_2==1))||((i5.u35.A2U_rotated==1)&&(i6.u37.arm2_stop==1)))||(((i7.u55.arm1_backward==1)&&(i7.u60.arm1_release_ext==1))&&(i7.u61.A1U_ret_run==1)))||((i6.u46.arm2_pick_up_ext==1)&&(i6.u46.A2L_ext_run==1)))||((i5.u36.robot_stop==1)&&(i5.u35.A1U_rot3_in==1)))||((i5.u36.robot_left==1)&&(i5.u44.A2L_rot2_rs==1)))||(i4.i0.u4.A2L_out==1))) + (i2.i2.u48.arm1_having_swivel_2==1)) + ((((((((i8.u63.crane_lift==0)||(i8.u74.CL_lift_rs==0))&&(((i5.u35.robot_right==0)||(i5.u35.arm2_pick_up_angle==0))||(i5.u35.A2U_rot3_run==0)))&&((i9.i0.u27.belt2_light_barrier_false==0)||(i9.i0.u27.DB_deliver_run==0)))&&((i5.u35.arm1_pick_up_angle==0)||(i5.u35.A1U_in==0)))&&((i2.i0.u8.ch_A1P_full==0)||(i2.i0.u11.press_ready_for_loading==0)))&&(((i7.u59.arm1_retract_ext==0)||(i7.u55.arm1_forward==0))||(i7.u60.A1U_ext_run==0)))&&((i5.u35.arm1_release_angle==0)||(i5.u35.A1U_rot1_run==0)))) + ((i5.u35.arm2_release_angle==1)&&(i5.u35.A2U_rot3_run==1))) + (((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u45.A2L_rot3_run==1))) + ((i8.u62.crane_mag_on==1)&&(i8.u64.CU_ready_to_ungrasp==1))) + ((i9.i0.u27.belt2_light_barrier_false==1)&&(i9.i0.u27.DB_deliver_run==1))) + ((i5.u35.arm1_pick_up_angle==1)&&(i5.u35.A1U_in==1))) + ((i5.u36.robot_stop==1)&&(i5.u35.A1U_rot2_in==1))) + ((i2.i0.u8.ch_A1P_full==1)&&(i2.i0.u11.press_ready_for_loading==1))) * ((((((i2.i2.u48.arm1_having_swivel_2==1)||((i8.u72.crane_pick_up_height==1)&&(i8.u72.CL_lower_run==1)))||((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u31.FB_trans_run==1)))||(((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u32.FB_deliver_run==1)))||(((i5.u35.arm1_pick_up_angle==1)&&(i5.u36.robot_left==1))&&(i5.u43.A2L_rot1_run==1))) + (!(A(((i6.u41.arm2_retract_ext==1)&&(i6.u47.A2L_ret_run==1)) U (((((((i5.u35.arm1_pick_up_angle==1)&&(i5.u42.A2L_in==1))||(i9.i1.u1.CU_out==1))||(i9.i1.u0.DB_out==1))||((i6.u38.A2U_extended==1)&&(i6.u39.arm2_magnet_on==1)))||((i3.i0.u21.table_top_pos==1)&&(i3.i0.u21.TU_lift_run==1)))||(((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u32.FB_deliver_run==1))))) * ((((((((((i0.i1.u29.feed_belt_empty==0)&&((i5.u35.arm2_pick_up_angle==0)||(i5.u44.A2L_rot2_run==0)))&&((i2.i2.u48.swivel==0)||(i4.i0.u2.arm2_waiting_for_swivel_2==0)))&&(((i6.u40.arm2_release_ext==0)||(i6.u37.arm2_backward==0))||(i6.u41.A2U_ret_run==0)))&&(((i3.i0.u21.table_top_pos==0)||(i3.i0.u16.table_upward==0))||(i3.i0.u18.TL_lower_run==0)))&&((i7.u55.arm1_stop==0)||(i5.u35.A1U_rotated==0)))&&((i9.i0.u24.belt2_start==0)||(i9.i0.u27.DB_deliver_rs==0)))&&(((i7.u58.arm1_pick_up_ext==0)||(i7.u55.arm1_backward==0))||(i7.u59.A1L_ret_run==0)))&&((i5.u35.arm2_pick_up_angle==0)||(i5.u51.A1L_in==0)))||((((i4.i0.u4.arm2_having_swivel_1==0)&&((i5.u36.robot_left==0)||(i5.u54.A1L_rot3_rs==0)))&&(((i1.u7.press_down==0)||(i1.u10.press_at_upper_pos==0))||(i1.u9.PU_lower_run==0)))&&((i3.i1.u22.table_unload_angle==0)||(i3.i1.u22.TU_rot_run==0)))))))) + ((((((((((i4.i1.u33.arm2_having_swivel_2==1)||((i7.u59.arm1_retract_ext==1)&&(i7.u59.A1L_ret_run==1)))||((i0.i1.u29.ch_CF_free==1)&&(i10.i1.u66.crane_storing==1)))||((i6.u38.A2U_extended==1)&&(i6.u39.arm2_magnet_on==1)))||((i5.u35.arm1_release_angle==1)&&(i5.u42.A2L_in==1)))||((i9.i0.u24.belt2_start==1)&&(i9.i0.u27.DB_deliver_rs==1)))||(((i10.i0.u73.crane_above_feed_belt==1)&&(i10.i0.u65.crane_to_belt2==1))&&(i10.i0.u68.CU_trans_run==1)))||((i7.u55.arm1_stop==1)&&(i7.u57.A1U_unloadet==1)))&&((((((((((i4.i1.u6.ch_PA2_free==1)&&(i4.i1.u6.press_ready_for_unloading==1))||((i1.u7.press_upward==1)&&(i1.u10.forge_rs==1)))||((i5.u36.robot_left==1)&&(i5.u53.A1L_rot2_rs==1)))||((i5.u36.robot_stop==1)&&(i5.u51.A1L_rot1_in==1)))||(((i5.u35.arm1_pick_up_angle==1)&&(i5.u35.robot_right==1))&&(i5.u35.A2U_rot1_run==1)))||((i7.u56.A1_extended==1)&&(i7.u57.arm1_magnet_off==1)))||((i3.i1.u22.table_unload_angle==1)&&(i3.i1.u22.TU_rot_run==1)))||((i3.i0.u18.table_bottom_pos==1)&&(i3.i0.u18.TL_lower_run==1)))||((i7.u55.arm1_backward==1)&&(i7.u61.A1U_ret_rs==1)))) * ((!(EG(((((((i0.i2.u30.belt1_start==1)&&(i0.i2.u31.FB_trans_rs==1))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot2_run==1)))||((i5.u35.A2U_in==1)&&(i5.u35.arm2_pick_up_angle==1)))||((i3.i0.u21.table_top_pos==1)&&(i3.i0.u21.TU_lift_run==1)))||((i1.u7.press_stop==1)&&(i1.u7.blank_forged==1))))) + (((i2.i0.u11.PL_out==0)&&((i5.u35.arm2_pick_up_angle==0)||(i5.u44.A2L_rot2_run==0)))&&((i2.i1.u20.ch_TA1_full==0)||(i2.i1.u20.arm1_store_free==0)))) + (((((((!(E(((i5.u35.arm1_pick_up_angle==1)&&(i5.u52.A1L_rot1_run==1)) U ((((((((((i0.i2.u32.belt1_light_barrier_false==1)&&(i0.i2.u32.FB_deliver_run==1))||((i2.i2.u48.swivel==1)&&(i2.i1.u20.arm1_waiting_for_swivel_1==1)))||((i5.u35.arm1_release_angle==1)&&(i5.u42.A2L_in==1)))||((i5.u36.robot_stop==1)&&(i5.u51.A1L_rot2_in==1)))||(((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u54.A1L_rot3_run==1)))||(i4.i1.u33.arm2_having_swivel_2==1))||(i10.i1.u25.CL_out==1))||((i7.u55.arm1_stop==1)&&(i7.u57.A1U_unloadet==1)))||((i0.i2.u30.belt1_stop==1)&&(i0.i2.u30.FB_at_end==1))))) * !(EF((((((((((i0.i2.u30.belt1_start==1)&&(i0.i2.u31.FB_trans_rs==1))||((i2.i2.u48.swivel==1)&&(i4.i0.u2.arm2_waiting_for_swivel_2==1)))||((i5.u36.A1L_rotated==1)&&(i7.u55.arm1_stop==1)))||((i6.u39.arm2_magnet_off==1)&&(i6.u39.A2L_extended==1)))||((i5.u35.arm1_release_angle==1)&&(i5.u42.A2L_in==1)))||((i0.i1.u3.ch_FT_free==1)&&(i0.i1.u28.feed_belt_occupied==1)))||((i9.i0.u27.belt2_light_barrier_false==1)&&(i9.i0.u27.DB_deliver_run==1)))||((i8.u63.crane_stop_v==1)&&(i9.i1.u70.CL_in==1)))))) * (i4.i0.u4.arm2_having_swivel_1==0)) * ((i0.i2.u30.belt1_start==0)||(i0.i2.u31.FB_trans_rs==0))) * ((i8.u63.crane_stop_v==0)||(i10.i1.u66.CU_in==0))) * ((i5.u36.robot_left==0)||(i5.u52.A1L_rot1_rs==0))) * ((i1.u12.press_at_middle_pos==0)||(i1.u12.PL_lower_run==0))) * ((i5.u36.robot_stop==0)||(i5.u35.A1U_rot1_in==0)))))))
=> equivalent forward existential formula: ([((FwdU(Init,TRUE) * !(((EG((((((((((((i0.i0.u19.FB_out==0)&&((i2.i2.u48.swivel==0)||(i2.i1.u20.arm1_waiting_for_swivel_1==0)))&&((i5.u35.arm2_pick_up_angle==0)||(i5.u35.A1U_in==0)))&&((i5.u36.robot_left==0)||(i5.u52.A1L_rot1_rs==0)))&&((i3.i1.u22.table_unload_angle==0)||(i3.i1.u22.TU_rot_run==0)))&&((i6.u37.arm2_backward==0)||(i6.u47.A2L_ret_rs==0)))&&((i5.u35.arm2_release_angle==0)||(i5.u35.A2U_rot1_run==0)))&&((i5.u35.arm1_release_angle==0)||(i5.u42.A2L_in==0)))&&((i3.i0.u16.table_stop_v==0)||(i3.i1.u15.table_at_unload_angle==0)))&&((i1.u9.press_at_lower_pos==0)||(i1.u9.PU_lower_run==0)))&&((i5.u36.robot_stop==0)||(i5.u35.A1U_rot1_in==0)))) + !((E(!(!(!(EX(!((((((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u35.A1U_rot3_run==1))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot3_run==1)))||((i3.i0.u16.table_at_load_angle==1)&&(i3.i0.u16.table_stop_v==1)))))))) U (!((((((((((((((i4.i1.u5.PU_out==1)||((i3.i1.u17.table_load_angle==1)&&(i3.i1.u17.TL_rot_run==1)))||((i5.u36.robot_stop==1)&&(i5.u42.A2L_rot1_in==1)))||(((i3.i0.u21.table_top_pos==1)&&(i3.i0.u16.table_upward==1))&&(i3.i0.u18.TL_lower_run==1)))||((i9.i0.u24.belt2_start==1)&&(i9.i0.u27.DB_deliver_rs==1)))||((i5.u35.robot_right==1)&&(i5.u35.A2U_rot3_rs==1)))||((i7.u55.arm1_forward==1)&&(i7.u60.A1U_ext_rs==1)))||(((i0.i2.u32.belt1_light_barrier_false==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u31.FB_trans_run==1)))||((i9.i0.u24.belt2_stop==1)&&(i9.i0.u24.DB_at_end==1)))&&(((((((((i5.u35.robot_right==1)&&(i5.u35.arm2_pick_up_angle==1))&&(i5.u35.A1U_rot2_run==1))||(i2.i1.u20.TU_out==1))||((i8.u63.crane_lift==1)&&(i8.u74.CL_lift_rs==1)))||((i10.i1.u25.ch_DC_free==1)&&(i4.i2.u23.deposit_belt_occupied==1)))||((i1.u7.press_stop==1)&&(i1.u7.blank_forged==1)))||(((i7.u58.arm1_pick_up_ext==1)&&(i7.u55.arm1_backward==1))&&(i7.u59.A1L_ret_run==1)))||((i7.u55.arm1_backward==1)&&(i7.u61.A1U_ret_rs==1))))&&((i8.u63.crane_lower==0)||(i8.u72.CL_lower_rs==0)))&&((i10.i0.u65.CU_ready_to_transport==0)||(i10.i0.u65.crane_stop_h==0)))&&((i2.i2.u48.swivel==0)||(i2.i0.u50.arm1_waiting_for_swivel_2==0)))) * !(!(!(EX(!((((((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u35.A1U_rot3_run==1))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot3_run==1)))||((i3.i0.u16.table_at_load_angle==1)&&(i3.i0.u16.table_stop_v==1)))))))))) + EG(!(!(!(EX(!((((((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u35.A1U_rot3_run==1))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot3_run==1)))||((i3.i0.u16.table_at_load_angle==1)&&(i3.i0.u16.table_stop_v==1)))))))))))) + ((((((((((!(EG(!(((((((((((i3.i1.u22.table_unload_angle==1)&&(i3.i1.u15.table_right==1))&&(i3.i1.u17.TL_rot_run==1))||(i2.i2.u48.arm1_having_swivel_2==1))||((i5.u35.A2U_rotated==1)&&(i6.u37.arm2_stop==1)))||(((i7.u55.arm1_backward==1)&&(i7.u60.arm1_release_ext==1))&&(i7.u61.A1U_ret_run==1)))||((i6.u46.arm2_pick_up_ext==1)&&(i6.u46.A2L_ext_run==1)))||((i5.u36.robot_stop==1)&&(i5.u35.A1U_rot3_in==1)))||((i5.u36.robot_left==1)&&(i5.u44.A2L_rot2_rs==1)))||(i4.i0.u4.A2L_out==1))))) + (i2.i2.u48.arm1_having_swivel_2==1)) + ((((((((i8.u63.crane_lift==0)||(i8.u74.CL_lift_rs==0))&&(((i5.u35.robot_right==0)||(i5.u35.arm2_pick_up_angle==0))||(i5.u35.A2U_rot3_run==0)))&&((i9.i0.u27.belt2_light_barrier_false==0)||(i9.i0.u27.DB_deliver_run==0)))&&((i5.u35.arm1_pick_up_angle==0)||(i5.u35.A1U_in==0)))&&((i2.i0.u8.ch_A1P_full==0)||(i2.i0.u11.press_ready_for_loading==0)))&&(((i7.u59.arm1_retract_ext==0)||(i7.u55.arm1_forward==0))||(i7.u60.A1U_ext_run==0)))&&((i5.u35.arm1_release_angle==0)||(i5.u35.A1U_rot1_run==0)))) + ((i5.u35.arm2_release_angle==1)&&(i5.u35.A2U_rot3_run==1))) + (((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u45.A2L_rot3_run==1))) + ((i8.u62.crane_mag_on==1)&&(i8.u64.CU_ready_to_ungrasp==1))) + ((i9.i0.u27.belt2_light_barrier_false==1)&&(i9.i0.u27.DB_deliver_run==1))) + ((i5.u35.arm1_pick_up_angle==1)&&(i5.u35.A1U_in==1))) + ((i5.u36.robot_stop==1)&&(i5.u35.A1U_rot2_in==1))) + ((i2.i0.u8.ch_A1P_full==1)&&(i2.i0.u11.press_ready_for_loading==1))) * ((((((i2.i2.u48.arm1_having_swivel_2==1)||((i8.u72.crane_pick_up_height==1)&&(i8.u72.CL_lower_run==1)))||((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u31.FB_trans_run==1)))||(((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u32.FB_deliver_run==1)))||(((i5.u35.arm1_pick_up_angle==1)&&(i5.u36.robot_left==1))&&(i5.u43.A2L_rot1_run==1))) + (!(!((E(!((((((((i5.u35.arm1_pick_up_angle==1)&&(i5.u42.A2L_in==1))||(i9.i1.u1.CU_out==1))||(i9.i1.u0.DB_out==1))||((i6.u38.A2U_extended==1)&&(i6.u39.arm2_magnet_on==1)))||((i3.i0.u21.table_top_pos==1)&&(i3.i0.u21.TU_lift_run==1)))||(((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u32.FB_deliver_run==1)))) U (!(((i6.u41.arm2_retract_ext==1)&&(i6.u47.A2L_ret_run==1))) * !((((((((i5.u35.arm1_pick_up_angle==1)&&(i5.u42.A2L_in==1))||(i9.i1.u1.CU_out==1))||(i9.i1.u0.DB_out==1))||((i6.u38.A2U_extended==1)&&(i6.u39.arm2_magnet_on==1)))||((i3.i0.u21.table_top_pos==1)&&(i3.i0.u21.TU_lift_run==1)))||(((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u32.FB_deliver_run==1)))))) + EG(!((((((((i5.u35.arm1_pick_up_angle==1)&&(i5.u42.A2L_in==1))||(i9.i1.u1.CU_out==1))||(i9.i1.u0.DB_out==1))||((i6.u38.A2U_extended==1)&&(i6.u39.arm2_magnet_on==1)))||((i3.i0.u21.table_top_pos==1)&&(i3.i0.u21.TU_lift_run==1)))||(((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u32.FB_deliver_run==1)))))))) * ((((((((((i0.i1.u29.feed_belt_empty==0)&&((i5.u35.arm2_pick_up_angle==0)||(i5.u44.A2L_rot2_run==0)))&&((i2.i2.u48.swivel==0)||(i4.i0.u2.arm2_waiting_for_swivel_2==0)))&&(((i6.u40.arm2_release_ext==0)||(i6.u37.arm2_backward==0))||(i6.u41.A2U_ret_run==0)))&&(((i3.i0.u21.table_top_pos==0)||(i3.i0.u16.table_upward==0))||(i3.i0.u18.TL_lower_run==0)))&&((i7.u55.arm1_stop==0)||(i5.u35.A1U_rotated==0)))&&((i9.i0.u24.belt2_start==0)||(i9.i0.u27.DB_deliver_rs==0)))&&(((i7.u58.arm1_pick_up_ext==0)||(i7.u55.arm1_backward==0))||(i7.u59.A1L_ret_run==0)))&&((i5.u35.arm2_pick_up_angle==0)||(i5.u51.A1L_in==0)))||((((i4.i0.u4.arm2_having_swivel_1==0)&&((i5.u36.robot_left==0)||(i5.u54.A1L_rot3_rs==0)))&&(((i1.u7.press_down==0)||(i1.u10.press_at_upper_pos==0))||(i1.u9.PU_lower_run==0)))&&((i3.i1.u22.table_unload_angle==0)||(i3.i1.u22.TU_rot_run==0)))))))))) * !((((((((((i4.i1.u33.arm2_having_swivel_2==1)||((i7.u59.arm1_retract_ext==1)&&(i7.u59.A1L_ret_run==1)))||((i0.i1.u29.ch_CF_free==1)&&(i10.i1.u66.crane_storing==1)))||((i6.u38.A2U_extended==1)&&(i6.u39.arm2_magnet_on==1)))||((i5.u35.arm1_release_angle==1)&&(i5.u42.A2L_in==1)))||((i9.i0.u24.belt2_start==1)&&(i9.i0.u27.DB_deliver_rs==1)))||(((i10.i0.u73.crane_above_feed_belt==1)&&(i10.i0.u65.crane_to_belt2==1))&&(i10.i0.u68.CU_trans_run==1)))||((i7.u55.arm1_stop==1)&&(i7.u57.A1U_unloadet==1)))&&((((((((((i4.i1.u6.ch_PA2_free==1)&&(i4.i1.u6.press_ready_for_unloading==1))||((i1.u7.press_upward==1)&&(i1.u10.forge_rs==1)))||((i5.u36.robot_left==1)&&(i5.u53.A1L_rot2_rs==1)))||((i5.u36.robot_stop==1)&&(i5.u51.A1L_rot1_in==1)))||(((i5.u35.arm1_pick_up_angle==1)&&(i5.u35.robot_right==1))&&(i5.u35.A2U_rot1_run==1)))||((i7.u56.A1_extended==1)&&(i7.u57.arm1_magnet_off==1)))||((i3.i1.u22.table_unload_angle==1)&&(i3.i1.u22.TU_rot_run==1)))||((i3.i0.u18.table_bottom_pos==1)&&(i3.i0.u18.TL_lower_run==1)))||((i7.u55.arm1_backward==1)&&(i7.u61.A1U_ret_rs==1))))))] = FALSE * ((((((([(FwdU(((FwdU(Init,TRUE) * !(((EG((((((((((((i0.i0.u19.FB_out==0)&&((i2.i2.u48.swivel==0)||(i2.i1.u20.arm1_waiting_for_swivel_1==0)))&&((i5.u35.arm2_pick_up_angle==0)||(i5.u35.A1U_in==0)))&&((i5.u36.robot_left==0)||(i5.u52.A1L_rot1_rs==0)))&&((i3.i1.u22.table_unload_angle==0)||(i3.i1.u22.TU_rot_run==0)))&&((i6.u37.arm2_backward==0)||(i6.u47.A2L_ret_rs==0)))&&((i5.u35.arm2_release_angle==0)||(i5.u35.A2U_rot1_run==0)))&&((i5.u35.arm1_release_angle==0)||(i5.u42.A2L_in==0)))&&((i3.i0.u16.table_stop_v==0)||(i3.i1.u15.table_at_unload_angle==0)))&&((i1.u9.press_at_lower_pos==0)||(i1.u9.PU_lower_run==0)))&&((i5.u36.robot_stop==0)||(i5.u35.A1U_rot1_in==0)))) + !((E(!(!(!(EX(!((((((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u35.A1U_rot3_run==1))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot3_run==1)))||((i3.i0.u16.table_at_load_angle==1)&&(i3.i0.u16.table_stop_v==1)))))))) U (!((((((((((((((i4.i1.u5.PU_out==1)||((i3.i1.u17.table_load_angle==1)&&(i3.i1.u17.TL_rot_run==1)))||((i5.u36.robot_stop==1)&&(i5.u42.A2L_rot1_in==1)))||(((i3.i0.u21.table_top_pos==1)&&(i3.i0.u16.table_upward==1))&&(i3.i0.u18.TL_lower_run==1)))||((i9.i0.u24.belt2_start==1)&&(i9.i0.u27.DB_deliver_rs==1)))||((i5.u35.robot_right==1)&&(i5.u35.A2U_rot3_rs==1)))||((i7.u55.arm1_forward==1)&&(i7.u60.A1U_ext_rs==1)))||(((i0.i2.u32.belt1_light_barrier_false==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u31.FB_trans_run==1)))||((i9.i0.u24.belt2_stop==1)&&(i9.i0.u24.DB_at_end==1)))&&(((((((((i5.u35.robot_right==1)&&(i5.u35.arm2_pick_up_angle==1))&&(i5.u35.A1U_rot2_run==1))||(i2.i1.u20.TU_out==1))||((i8.u63.crane_lift==1)&&(i8.u74.CL_lift_rs==1)))||((i10.i1.u25.ch_DC_free==1)&&(i4.i2.u23.deposit_belt_occupied==1)))||((i1.u7.press_stop==1)&&(i1.u7.blank_forged==1)))||(((i7.u58.arm1_pick_up_ext==1)&&(i7.u55.arm1_backward==1))&&(i7.u59.A1L_ret_run==1)))||((i7.u55.arm1_backward==1)&&(i7.u61.A1U_ret_rs==1))))&&((i8.u63.crane_lower==0)||(i8.u72.CL_lower_rs==0)))&&((i10.i0.u65.CU_ready_to_transport==0)||(i10.i0.u65.crane_stop_h==0)))&&((i2.i2.u48.swivel==0)||(i2.i0.u50.arm1_waiting_for_swivel_2==0)))) * !(!(!(EX(!((((((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u35.A1U_rot3_run==1))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot3_run==1)))||((i3.i0.u16.table_at_load_angle==1)&&(i3.i0.u16.table_stop_v==1)))))))))) + EG(!(!(!(EX(!((((((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u35.A1U_rot3_run==1))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot3_run==1)))||((i3.i0.u16.table_at_load_angle==1)&&(i3.i0.u16.table_stop_v==1)))))))))))) + ((((((((((!(EG(!(((((((((((i3.i1.u22.table_unload_angle==1)&&(i3.i1.u15.table_right==1))&&(i3.i1.u17.TL_rot_run==1))||(i2.i2.u48.arm1_having_swivel_2==1))||((i5.u35.A2U_rotated==1)&&(i6.u37.arm2_stop==1)))||(((i7.u55.arm1_backward==1)&&(i7.u60.arm1_release_ext==1))&&(i7.u61.A1U_ret_run==1)))||((i6.u46.arm2_pick_up_ext==1)&&(i6.u46.A2L_ext_run==1)))||((i5.u36.robot_stop==1)&&(i5.u35.A1U_rot3_in==1)))||((i5.u36.robot_left==1)&&(i5.u44.A2L_rot2_rs==1)))||(i4.i0.u4.A2L_out==1))))) + (i2.i2.u48.arm1_having_swivel_2==1)) + ((((((((i8.u63.crane_lift==0)||(i8.u74.CL_lift_rs==0))&&(((i5.u35.robot_right==0)||(i5.u35.arm2_pick_up_angle==0))||(i5.u35.A2U_rot3_run==0)))&&((i9.i0.u27.belt2_light_barrier_false==0)||(i9.i0.u27.DB_deliver_run==0)))&&((i5.u35.arm1_pick_up_angle==0)||(i5.u35.A1U_in==0)))&&((i2.i0.u8.ch_A1P_full==0)||(i2.i0.u11.press_ready_for_loading==0)))&&(((i7.u59.arm1_retract_ext==0)||(i7.u55.arm1_forward==0))||(i7.u60.A1U_ext_run==0)))&&((i5.u35.arm1_release_angle==0)||(i5.u35.A1U_rot1_run==0)))) + ((i5.u35.arm2_release_angle==1)&&(i5.u35.A2U_rot3_run==1))) + (((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u45.A2L_rot3_run==1))) + ((i8.u62.crane_mag_on==1)&&(i8.u64.CU_ready_to_ungrasp==1))) + ((i9.i0.u27.belt2_light_barrier_false==1)&&(i9.i0.u27.DB_deliver_run==1))) + ((i5.u35.arm1_pick_up_angle==1)&&(i5.u35.A1U_in==1))) + ((i5.u36.robot_stop==1)&&(i5.u35.A1U_rot2_in==1))) + ((i2.i0.u8.ch_A1P_full==1)&&(i2.i0.u11.press_ready_for_loading==1))) * ((((((i2.i2.u48.arm1_having_swivel_2==1)||((i8.u72.crane_pick_up_height==1)&&(i8.u72.CL_lower_run==1)))||((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u31.FB_trans_run==1)))||(((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u32.FB_deliver_run==1)))||(((i5.u35.arm1_pick_up_angle==1)&&(i5.u36.robot_left==1))&&(i5.u43.A2L_rot1_run==1))) + (!(!((E(!((((((((i5.u35.arm1_pick_up_angle==1)&&(i5.u42.A2L_in==1))||(i9.i1.u1.CU_out==1))||(i9.i1.u0.DB_out==1))||((i6.u38.A2U_extended==1)&&(i6.u39.arm2_magnet_on==1)))||((i3.i0.u21.table_top_pos==1)&&(i3.i0.u21.TU_lift_run==1)))||(((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u32.FB_deliver_run==1)))) U (!(((i6.u41.arm2_retract_ext==1)&&(i6.u47.A2L_ret_run==1))) * !((((((((i5.u35.arm1_pick_up_angle==1)&&(i5.u42.A2L_in==1))||(i9.i1.u1.CU_out==1))||(i9.i1.u0.DB_out==1))||((i6.u38.A2U_extended==1)&&(i6.u39.arm2_magnet_on==1)))||((i3.i0.u21.table_top_pos==1)&&(i3.i0.u21.TU_lift_run==1)))||(((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u32.FB_deliver_run==1)))))) + EG(!((((((((i5.u35.arm1_pick_up_angle==1)&&(i5.u42.A2L_in==1))||(i9.i1.u1.CU_out==1))||(i9.i1.u0.DB_out==1))||((i6.u38.A2U_extended==1)&&(i6.u39.arm2_magnet_on==1)))||((i3.i0.u21.table_top_pos==1)&&(i3.i0.u21.TU_lift_run==1)))||(((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u32.FB_deliver_run==1)))))))) * ((((((((((i0.i1.u29.feed_belt_empty==0)&&((i5.u35.arm2_pick_up_angle==0)||(i5.u44.A2L_rot2_run==0)))&&((i2.i2.u48.swivel==0)||(i4.i0.u2.arm2_waiting_for_swivel_2==0)))&&(((i6.u40.arm2_release_ext==0)||(i6.u37.arm2_backward==0))||(i6.u41.A2U_ret_run==0)))&&(((i3.i0.u21.table_top_pos==0)||(i3.i0.u16.table_upward==0))||(i3.i0.u18.TL_lower_run==0)))&&((i7.u55.arm1_stop==0)||(i5.u35.A1U_rotated==0)))&&((i9.i0.u24.belt2_start==0)||(i9.i0.u27.DB_deliver_rs==0)))&&(((i7.u58.arm1_pick_up_ext==0)||(i7.u55.arm1_backward==0))||(i7.u59.A1L_ret_run==0)))&&((i5.u35.arm2_pick_up_angle==0)||(i5.u51.A1L_in==0)))||((((i4.i0.u4.arm2_having_swivel_1==0)&&((i5.u36.robot_left==0)||(i5.u54.A1L_rot3_rs==0)))&&(((i1.u7.press_down==0)||(i1.u10.press_at_upper_pos==0))||(i1.u9.PU_lower_run==0)))&&((i3.i1.u22.table_unload_angle==0)||(i3.i1.u22.TU_rot_run==0)))))))))) * !((!(EG(((((((i0.i2.u30.belt1_start==1)&&(i0.i2.u31.FB_trans_rs==1))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot2_run==1)))||((i5.u35.A2U_in==1)&&(i5.u35.arm2_pick_up_angle==1)))||((i3.i0.u21.table_top_pos==1)&&(i3.i0.u21.TU_lift_run==1)))||((i1.u7.press_stop==1)&&(i1.u7.blank_forged==1))))) + (((i2.i0.u11.PL_out==0)&&((i5.u35.arm2_pick_up_angle==0)||(i5.u44.A2L_rot2_run==0)))&&((i2.i1.u20.ch_TA1_full==0)||(i2.i1.u20.arm1_store_free==0)))))),((i5.u35.arm1_pick_up_angle==1)&&(i5.u52.A1L_rot1_run==1))) * ((((((((((i0.i2.u32.belt1_light_barrier_false==1)&&(i0.i2.u32.FB_deliver_run==1))||((i2.i2.u48.swivel==1)&&(i2.i1.u20.arm1_waiting_for_swivel_1==1)))||((i5.u35.arm1_release_angle==1)&&(i5.u42.A2L_in==1)))||((i5.u36.robot_stop==1)&&(i5.u51.A1L_rot2_in==1)))||(((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u54.A1L_rot3_run==1)))||(i4.i1.u33.arm2_having_swivel_2==1))||(i10.i1.u25.CL_out==1))||((i7.u55.arm1_stop==1)&&(i7.u57.A1U_unloadet==1)))||((i0.i2.u30.belt1_stop==1)&&(i0.i2.u30.FB_at_end==1))))] = FALSE * [(FwdU(((FwdU(Init,TRUE) * !(((EG((((((((((((i0.i0.u19.FB_out==0)&&((i2.i2.u48.swivel==0)||(i2.i1.u20.arm1_waiting_for_swivel_1==0)))&&((i5.u35.arm2_pick_up_angle==0)||(i5.u35.A1U_in==0)))&&((i5.u36.robot_left==0)||(i5.u52.A1L_rot1_rs==0)))&&((i3.i1.u22.table_unload_angle==0)||(i3.i1.u22.TU_rot_run==0)))&&((i6.u37.arm2_backward==0)||(i6.u47.A2L_ret_rs==0)))&&((i5.u35.arm2_release_angle==0)||(i5.u35.A2U_rot1_run==0)))&&((i5.u35.arm1_release_angle==0)||(i5.u42.A2L_in==0)))&&((i3.i0.u16.table_stop_v==0)||(i3.i1.u15.table_at_unload_angle==0)))&&((i1.u9.press_at_lower_pos==0)||(i1.u9.PU_lower_run==0)))&&((i5.u36.robot_stop==0)||(i5.u35.A1U_rot1_in==0)))) + !((E(!(!(!(EX(!((((((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u35.A1U_rot3_run==1))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot3_run==1)))||((i3.i0.u16.table_at_load_angle==1)&&(i3.i0.u16.table_stop_v==1)))))))) U (!((((((((((((((i4.i1.u5.PU_out==1)||((i3.i1.u17.table_load_angle==1)&&(i3.i1.u17.TL_rot_run==1)))||((i5.u36.robot_stop==1)&&(i5.u42.A2L_rot1_in==1)))||(((i3.i0.u21.table_top_pos==1)&&(i3.i0.u16.table_upward==1))&&(i3.i0.u18.TL_lower_run==1)))||((i9.i0.u24.belt2_start==1)&&(i9.i0.u27.DB_deliver_rs==1)))||((i5.u35.robot_right==1)&&(i5.u35.A2U_rot3_rs==1)))||((i7.u55.arm1_forward==1)&&(i7.u60.A1U_ext_rs==1)))||(((i0.i2.u32.belt1_light_barrier_false==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u31.FB_trans_run==1)))||((i9.i0.u24.belt2_stop==1)&&(i9.i0.u24.DB_at_end==1)))&&(((((((((i5.u35.robot_right==1)&&(i5.u35.arm2_pick_up_angle==1))&&(i5.u35.A1U_rot2_run==1))||(i2.i1.u20.TU_out==1))||((i8.u63.crane_lift==1)&&(i8.u74.CL_lift_rs==1)))||((i10.i1.u25.ch_DC_free==1)&&(i4.i2.u23.deposit_belt_occupied==1)))||((i1.u7.press_stop==1)&&(i1.u7.blank_forged==1)))||(((i7.u58.arm1_pick_up_ext==1)&&(i7.u55.arm1_backward==1))&&(i7.u59.A1L_ret_run==1)))||((i7.u55.arm1_backward==1)&&(i7.u61.A1U_ret_rs==1))))&&((i8.u63.crane_lower==0)||(i8.u72.CL_lower_rs==0)))&&((i10.i0.u65.CU_ready_to_transport==0)||(i10.i0.u65.crane_stop_h==0)))&&((i2.i2.u48.swivel==0)||(i2.i0.u50.arm1_waiting_for_swivel_2==0)))) * !(!(!(EX(!((((((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u35.A1U_rot3_run==1))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot3_run==1)))||((i3.i0.u16.table_at_load_angle==1)&&(i3.i0.u16.table_stop_v==1)))))))))) + EG(!(!(!(EX(!((((((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u35.A1U_rot3_run==1))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot3_run==1)))||((i3.i0.u16.table_at_load_angle==1)&&(i3.i0.u16.table_stop_v==1)))))))))))) + ((((((((((!(EG(!(((((((((((i3.i1.u22.table_unload_angle==1)&&(i3.i1.u15.table_right==1))&&(i3.i1.u17.TL_rot_run==1))||(i2.i2.u48.arm1_having_swivel_2==1))||((i5.u35.A2U_rotated==1)&&(i6.u37.arm2_stop==1)))||(((i7.u55.arm1_backward==1)&&(i7.u60.arm1_release_ext==1))&&(i7.u61.A1U_ret_run==1)))||((i6.u46.arm2_pick_up_ext==1)&&(i6.u46.A2L_ext_run==1)))||((i5.u36.robot_stop==1)&&(i5.u35.A1U_rot3_in==1)))||((i5.u36.robot_left==1)&&(i5.u44.A2L_rot2_rs==1)))||(i4.i0.u4.A2L_out==1))))) + (i2.i2.u48.arm1_having_swivel_2==1)) + ((((((((i8.u63.crane_lift==0)||(i8.u74.CL_lift_rs==0))&&(((i5.u35.robot_right==0)||(i5.u35.arm2_pick_up_angle==0))||(i5.u35.A2U_rot3_run==0)))&&((i9.i0.u27.belt2_light_barrier_false==0)||(i9.i0.u27.DB_deliver_run==0)))&&((i5.u35.arm1_pick_up_angle==0)||(i5.u35.A1U_in==0)))&&((i2.i0.u8.ch_A1P_full==0)||(i2.i0.u11.press_ready_for_loading==0)))&&(((i7.u59.arm1_retract_ext==0)||(i7.u55.arm1_forward==0))||(i7.u60.A1U_ext_run==0)))&&((i5.u35.arm1_release_angle==0)||(i5.u35.A1U_rot1_run==0)))) + ((i5.u35.arm2_release_angle==1)&&(i5.u35.A2U_rot3_run==1))) + (((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u45.A2L_rot3_run==1))) + ((i8.u62.crane_mag_on==1)&&(i8.u64.CU_ready_to_ungrasp==1))) + ((i9.i0.u27.belt2_light_barrier_false==1)&&(i9.i0.u27.DB_deliver_run==1))) + ((i5.u35.arm1_pick_up_angle==1)&&(i5.u35.A1U_in==1))) + ((i5.u36.robot_stop==1)&&(i5.u35.A1U_rot2_in==1))) + ((i2.i0.u8.ch_A1P_full==1)&&(i2.i0.u11.press_ready_for_loading==1))) * ((((((i2.i2.u48.arm1_having_swivel_2==1)||((i8.u72.crane_pick_up_height==1)&&(i8.u72.CL_lower_run==1)))||((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u31.FB_trans_run==1)))||(((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u32.FB_deliver_run==1)))||(((i5.u35.arm1_pick_up_angle==1)&&(i5.u36.robot_left==1))&&(i5.u43.A2L_rot1_run==1))) + (!(!((E(!((((((((i5.u35.arm1_pick_up_angle==1)&&(i5.u42.A2L_in==1))||(i9.i1.u1.CU_out==1))||(i9.i1.u0.DB_out==1))||((i6.u38.A2U_extended==1)&&(i6.u39.arm2_magnet_on==1)))||((i3.i0.u21.table_top_pos==1)&&(i3.i0.u21.TU_lift_run==1)))||(((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u32.FB_deliver_run==1)))) U (!(((i6.u41.arm2_retract_ext==1)&&(i6.u47.A2L_ret_run==1))) * !((((((((i5.u35.arm1_pick_up_angle==1)&&(i5.u42.A2L_in==1))||(i9.i1.u1.CU_out==1))||(i9.i1.u0.DB_out==1))||((i6.u38.A2U_extended==1)&&(i6.u39.arm2_magnet_on==1)))||((i3.i0.u21.table_top_pos==1)&&(i3.i0.u21.TU_lift_run==1)))||(((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u32.FB_deliver_run==1)))))) + EG(!((((((((i5.u35.arm1_pick_up_angle==1)&&(i5.u42.A2L_in==1))||(i9.i1.u1.CU_out==1))||(i9.i1.u0.DB_out==1))||((i6.u38.A2U_extended==1)&&(i6.u39.arm2_magnet_on==1)))||((i3.i0.u21.table_top_pos==1)&&(i3.i0.u21.TU_lift_run==1)))||(((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u32.FB_deliver_run==1)))))))) * ((((((((((i0.i1.u29.feed_belt_empty==0)&&((i5.u35.arm2_pick_up_angle==0)||(i5.u44.A2L_rot2_run==0)))&&((i2.i2.u48.swivel==0)||(i4.i0.u2.arm2_waiting_for_swivel_2==0)))&&(((i6.u40.arm2_release_ext==0)||(i6.u37.arm2_backward==0))||(i6.u41.A2U_ret_run==0)))&&(((i3.i0.u21.table_top_pos==0)||(i3.i0.u16.table_upward==0))||(i3.i0.u18.TL_lower_run==0)))&&((i7.u55.arm1_stop==0)||(i5.u35.A1U_rotated==0)))&&((i9.i0.u24.belt2_start==0)||(i9.i0.u27.DB_deliver_rs==0)))&&(((i7.u58.arm1_pick_up_ext==0)||(i7.u55.arm1_backward==0))||(i7.u59.A1L_ret_run==0)))&&((i5.u35.arm2_pick_up_angle==0)||(i5.u51.A1L_in==0)))||((((i4.i0.u4.arm2_having_swivel_1==0)&&((i5.u36.robot_left==0)||(i5.u54.A1L_rot3_rs==0)))&&(((i1.u7.press_down==0)||(i1.u10.press_at_upper_pos==0))||(i1.u9.PU_lower_run==0)))&&((i3.i1.u22.table_unload_angle==0)||(i3.i1.u22.TU_rot_run==0)))))))))) * !((!(EG(((((((i0.i2.u30.belt1_start==1)&&(i0.i2.u31.FB_trans_rs==1))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot2_run==1)))||((i5.u35.A2U_in==1)&&(i5.u35.arm2_pick_up_angle==1)))||((i3.i0.u21.table_top_pos==1)&&(i3.i0.u21.TU_lift_run==1)))||((i1.u7.press_stop==1)&&(i1.u7.blank_forged==1))))) + (((i2.i0.u11.PL_out==0)&&((i5.u35.arm2_pick_up_angle==0)||(i5.u44.A2L_rot2_run==0)))&&((i2.i1.u20.ch_TA1_full==0)||(i2.i1.u20.arm1_store_free==0)))))),TRUE) * (((((((((i0.i2.u30.belt1_start==1)&&(i0.i2.u31.FB_trans_rs==1))||((i2.i2.u48.swivel==1)&&(i4.i0.u2.arm2_waiting_for_swivel_2==1)))||((i5.u36.A1L_rotated==1)&&(i7.u55.arm1_stop==1)))||((i6.u39.arm2_magnet_off==1)&&(i6.u39.A2L_extended==1)))||((i5.u35.arm1_release_angle==1)&&(i5.u42.A2L_in==1)))||((i0.i1.u3.ch_FT_free==1)&&(i0.i1.u28.feed_belt_occupied==1)))||((i9.i0.u27.belt2_light_barrier_false==1)&&(i9.i0.u27.DB_deliver_run==1)))||((i8.u63.crane_stop_v==1)&&(i9.i1.u70.CL_in==1))))] = FALSE) * [(((FwdU(Init,TRUE) * !(((EG((((((((((((i0.i0.u19.FB_out==0)&&((i2.i2.u48.swivel==0)||(i2.i1.u20.arm1_waiting_for_swivel_1==0)))&&((i5.u35.arm2_pick_up_angle==0)||(i5.u35.A1U_in==0)))&&((i5.u36.robot_left==0)||(i5.u52.A1L_rot1_rs==0)))&&((i3.i1.u22.table_unload_angle==0)||(i3.i1.u22.TU_rot_run==0)))&&((i6.u37.arm2_backward==0)||(i6.u47.A2L_ret_rs==0)))&&((i5.u35.arm2_release_angle==0)||(i5.u35.A2U_rot1_run==0)))&&((i5.u35.arm1_release_angle==0)||(i5.u42.A2L_in==0)))&&((i3.i0.u16.table_stop_v==0)||(i3.i1.u15.table_at_unload_angle==0)))&&((i1.u9.press_at_lower_pos==0)||(i1.u9.PU_lower_run==0)))&&((i5.u36.robot_stop==0)||(i5.u35.A1U_rot1_in==0)))) + !((E(!(!(!(EX(!((((((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u35.A1U_rot3_run==1))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot3_run==1)))||((i3.i0.u16.table_at_load_angle==1)&&(i3.i0.u16.table_stop_v==1)))))))) U (!((((((((((((((i4.i1.u5.PU_out==1)||((i3.i1.u17.table_load_angle==1)&&(i3.i1.u17.TL_rot_run==1)))||((i5.u36.robot_stop==1)&&(i5.u42.A2L_rot1_in==1)))||(((i3.i0.u21.table_top_pos==1)&&(i3.i0.u16.table_upward==1))&&(i3.i0.u18.TL_lower_run==1)))||((i9.i0.u24.belt2_start==1)&&(i9.i0.u27.DB_deliver_rs==1)))||((i5.u35.robot_right==1)&&(i5.u35.A2U_rot3_rs==1)))||((i7.u55.arm1_forward==1)&&(i7.u60.A1U_ext_rs==1)))||(((i0.i2.u32.belt1_light_barrier_false==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u31.FB_trans_run==1)))||((i9.i0.u24.belt2_stop==1)&&(i9.i0.u24.DB_at_end==1)))&&(((((((((i5.u35.robot_right==1)&&(i5.u35.arm2_pick_up_angle==1))&&(i5.u35.A1U_rot2_run==1))||(i2.i1.u20.TU_out==1))||((i8.u63.crane_lift==1)&&(i8.u74.CL_lift_rs==1)))||((i10.i1.u25.ch_DC_free==1)&&(i4.i2.u23.deposit_belt_occupied==1)))||((i1.u7.press_stop==1)&&(i1.u7.blank_forged==1)))||(((i7.u58.arm1_pick_up_ext==1)&&(i7.u55.arm1_backward==1))&&(i7.u59.A1L_ret_run==1)))||((i7.u55.arm1_backward==1)&&(i7.u61.A1U_ret_rs==1))))&&((i8.u63.crane_lower==0)||(i8.u72.CL_lower_rs==0)))&&((i10.i0.u65.CU_ready_to_transport==0)||(i10.i0.u65.crane_stop_h==0)))&&((i2.i2.u48.swivel==0)||(i2.i0.u50.arm1_waiting_for_swivel_2==0)))) * !(!(!(EX(!((((((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u35.A1U_rot3_run==1))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot3_run==1)))||((i3.i0.u16.table_at_load_angle==1)&&(i3.i0.u16.table_stop_v==1)))))))))) + EG(!(!(!(EX(!((((((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u35.A1U_rot3_run==1))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot3_run==1)))||((i3.i0.u16.table_at_load_angle==1)&&(i3.i0.u16.table_stop_v==1)))))))))))) + ((((((((((!(EG(!(((((((((((i3.i1.u22.table_unload_angle==1)&&(i3.i1.u15.table_right==1))&&(i3.i1.u17.TL_rot_run==1))||(i2.i2.u48.arm1_having_swivel_2==1))||((i5.u35.A2U_rotated==1)&&(i6.u37.arm2_stop==1)))||(((i7.u55.arm1_backward==1)&&(i7.u60.arm1_release_ext==1))&&(i7.u61.A1U_ret_run==1)))||((i6.u46.arm2_pick_up_ext==1)&&(i6.u46.A2L_ext_run==1)))||((i5.u36.robot_stop==1)&&(i5.u35.A1U_rot3_in==1)))||((i5.u36.robot_left==1)&&(i5.u44.A2L_rot2_rs==1)))||(i4.i0.u4.A2L_out==1))))) + (i2.i2.u48.arm1_having_swivel_2==1)) + ((((((((i8.u63.crane_lift==0)||(i8.u74.CL_lift_rs==0))&&(((i5.u35.robot_right==0)||(i5.u35.arm2_pick_up_angle==0))||(i5.u35.A2U_rot3_run==0)))&&((i9.i0.u27.belt2_light_barrier_false==0)||(i9.i0.u27.DB_deliver_run==0)))&&((i5.u35.arm1_pick_up_angle==0)||(i5.u35.A1U_in==0)))&&((i2.i0.u8.ch_A1P_full==0)||(i2.i0.u11.press_ready_for_loading==0)))&&(((i7.u59.arm1_retract_ext==0)||(i7.u55.arm1_forward==0))||(i7.u60.A1U_ext_run==0)))&&((i5.u35.arm1_release_angle==0)||(i5.u35.A1U_rot1_run==0)))) + ((i5.u35.arm2_release_angle==1)&&(i5.u35.A2U_rot3_run==1))) + (((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u45.A2L_rot3_run==1))) + ((i8.u62.crane_mag_on==1)&&(i8.u64.CU_ready_to_ungrasp==1))) + ((i9.i0.u27.belt2_light_barrier_false==1)&&(i9.i0.u27.DB_deliver_run==1))) + ((i5.u35.arm1_pick_up_angle==1)&&(i5.u35.A1U_in==1))) + ((i5.u36.robot_stop==1)&&(i5.u35.A1U_rot2_in==1))) + ((i2.i0.u8.ch_A1P_full==1)&&(i2.i0.u11.press_ready_for_loading==1))) * ((((((i2.i2.u48.arm1_having_swivel_2==1)||((i8.u72.crane_pick_up_height==1)&&(i8.u72.CL_lower_run==1)))||((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u31.FB_trans_run==1)))||(((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u32.FB_deliver_run==1)))||(((i5.u35.arm1_pick_up_angle==1)&&(i5.u36.robot_left==1))&&(i5.u43.A2L_rot1_run==1))) + (!(!((E(!((((((((i5.u35.arm1_pick_up_angle==1)&&(i5.u42.A2L_in==1))||(i9.i1.u1.CU_out==1))||(i9.i1.u0.DB_out==1))||((i6.u38.A2U_extended==1)&&(i6.u39.arm2_magnet_on==1)))||((i3.i0.u21.table_top_pos==1)&&(i3.i0.u21.TU_lift_run==1)))||(((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u32.FB_deliver_run==1)))) U (!(((i6.u41.arm2_retract_ext==1)&&(i6.u47.A2L_ret_run==1))) * !((((((((i5.u35.arm1_pick_up_angle==1)&&(i5.u42.A2L_in==1))||(i9.i1.u1.CU_out==1))||(i9.i1.u0.DB_out==1))||((i6.u38.A2U_extended==1)&&(i6.u39.arm2_magnet_on==1)))||((i3.i0.u21.table_top_pos==1)&&(i3.i0.u21.TU_lift_run==1)))||(((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u32.FB_deliver_run==1)))))) + EG(!((((((((i5.u35.arm1_pick_up_angle==1)&&(i5.u42.A2L_in==1))||(i9.i1.u1.CU_out==1))||(i9.i1.u0.DB_out==1))||((i6.u38.A2U_extended==1)&&(i6.u39.arm2_magnet_on==1)))||((i3.i0.u21.table_top_pos==1)&&(i3.i0.u21.TU_lift_run==1)))||(((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u32.FB_deliver_run==1)))))))) * ((((((((((i0.i1.u29.feed_belt_empty==0)&&((i5.u35.arm2_pick_up_angle==0)||(i5.u44.A2L_rot2_run==0)))&&((i2.i2.u48.swivel==0)||(i4.i0.u2.arm2_waiting_for_swivel_2==0)))&&(((i6.u40.arm2_release_ext==0)||(i6.u37.arm2_backward==0))||(i6.u41.A2U_ret_run==0)))&&(((i3.i0.u21.table_top_pos==0)||(i3.i0.u16.table_upward==0))||(i3.i0.u18.TL_lower_run==0)))&&((i7.u55.arm1_stop==0)||(i5.u35.A1U_rotated==0)))&&((i9.i0.u24.belt2_start==0)||(i9.i0.u27.DB_deliver_rs==0)))&&(((i7.u58.arm1_pick_up_ext==0)||(i7.u55.arm1_backward==0))||(i7.u59.A1L_ret_run==0)))&&((i5.u35.arm2_pick_up_angle==0)||(i5.u51.A1L_in==0)))||((((i4.i0.u4.arm2_having_swivel_1==0)&&((i5.u36.robot_left==0)||(i5.u54.A1L_rot3_rs==0)))&&(((i1.u7.press_down==0)||(i1.u10.press_at_upper_pos==0))||(i1.u9.PU_lower_run==0)))&&((i3.i1.u22.table_unload_angle==0)||(i3.i1.u22.TU_rot_run==0)))))))))) * !((!(EG(((((((i0.i2.u30.belt1_start==1)&&(i0.i2.u31.FB_trans_rs==1))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot2_run==1)))||((i5.u35.A2U_in==1)&&(i5.u35.arm2_pick_up_angle==1)))||((i3.i0.u21.table_top_pos==1)&&(i3.i0.u21.TU_lift_run==1)))||((i1.u7.press_stop==1)&&(i1.u7.blank_forged==1))))) + (((i2.i0.u11.PL_out==0)&&((i5.u35.arm2_pick_up_angle==0)||(i5.u44.A2L_rot2_run==0)))&&((i2.i1.u20.ch_TA1_full==0)||(i2.i1.u20.arm1_store_free==0)))))) * !((i4.i0.u4.arm2_having_swivel_1==0)))] = FALSE) * [(((FwdU(Init,TRUE) * !(((EG((((((((((((i0.i0.u19.FB_out==0)&&((i2.i2.u48.swivel==0)||(i2.i1.u20.arm1_waiting_for_swivel_1==0)))&&((i5.u35.arm2_pick_up_angle==0)||(i5.u35.A1U_in==0)))&&((i5.u36.robot_left==0)||(i5.u52.A1L_rot1_rs==0)))&&((i3.i1.u22.table_unload_angle==0)||(i3.i1.u22.TU_rot_run==0)))&&((i6.u37.arm2_backward==0)||(i6.u47.A2L_ret_rs==0)))&&((i5.u35.arm2_release_angle==0)||(i5.u35.A2U_rot1_run==0)))&&((i5.u35.arm1_release_angle==0)||(i5.u42.A2L_in==0)))&&((i3.i0.u16.table_stop_v==0)||(i3.i1.u15.table_at_unload_angle==0)))&&((i1.u9.press_at_lower_pos==0)||(i1.u9.PU_lower_run==0)))&&((i5.u36.robot_stop==0)||(i5.u35.A1U_rot1_in==0)))) + !((E(!(!(!(EX(!((((((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u35.A1U_rot3_run==1))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot3_run==1)))||((i3.i0.u16.table_at_load_angle==1)&&(i3.i0.u16.table_stop_v==1)))))))) U (!((((((((((((((i4.i1.u5.PU_out==1)||((i3.i1.u17.table_load_angle==1)&&(i3.i1.u17.TL_rot_run==1)))||((i5.u36.robot_stop==1)&&(i5.u42.A2L_rot1_in==1)))||(((i3.i0.u21.table_top_pos==1)&&(i3.i0.u16.table_upward==1))&&(i3.i0.u18.TL_lower_run==1)))||((i9.i0.u24.belt2_start==1)&&(i9.i0.u27.DB_deliver_rs==1)))||((i5.u35.robot_right==1)&&(i5.u35.A2U_rot3_rs==1)))||((i7.u55.arm1_forward==1)&&(i7.u60.A1U_ext_rs==1)))||(((i0.i2.u32.belt1_light_barrier_false==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u31.FB_trans_run==1)))||((i9.i0.u24.belt2_stop==1)&&(i9.i0.u24.DB_at_end==1)))&&(((((((((i5.u35.robot_right==1)&&(i5.u35.arm2_pick_up_angle==1))&&(i5.u35.A1U_rot2_run==1))||(i2.i1.u20.TU_out==1))||((i8.u63.crane_lift==1)&&(i8.u74.CL_lift_rs==1)))||((i10.i1.u25.ch_DC_free==1)&&(i4.i2.u23.deposit_belt_occupied==1)))||((i1.u7.press_stop==1)&&(i1.u7.blank_forged==1)))||(((i7.u58.arm1_pick_up_ext==1)&&(i7.u55.arm1_backward==1))&&(i7.u59.A1L_ret_run==1)))||((i7.u55.arm1_backward==1)&&(i7.u61.A1U_ret_rs==1))))&&((i8.u63.crane_lower==0)||(i8.u72.CL_lower_rs==0)))&&((i10.i0.u65.CU_ready_to_transport==0)||(i10.i0.u65.crane_stop_h==0)))&&((i2.i2.u48.swivel==0)||(i2.i0.u50.arm1_waiting_for_swivel_2==0)))) * !(!(!(EX(!((((((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u35.A1U_rot3_run==1))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot3_run==1)))||((i3.i0.u16.table_at_load_angle==1)&&(i3.i0.u16.table_stop_v==1)))))))))) + EG(!(!(!(EX(!((((((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u35.A1U_rot3_run==1))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot3_run==1)))||((i3.i0.u16.table_at_load_angle==1)&&(i3.i0.u16.table_stop_v==1)))))))))))) + ((((((((((!(EG(!(((((((((((i3.i1.u22.table_unload_angle==1)&&(i3.i1.u15.table_right==1))&&(i3.i1.u17.TL_rot_run==1))||(i2.i2.u48.arm1_having_swivel_2==1))||((i5.u35.A2U_rotated==1)&&(i6.u37.arm2_stop==1)))||(((i7.u55.arm1_backward==1)&&(i7.u60.arm1_release_ext==1))&&(i7.u61.A1U_ret_run==1)))||((i6.u46.arm2_pick_up_ext==1)&&(i6.u46.A2L_ext_run==1)))||((i5.u36.robot_stop==1)&&(i5.u35.A1U_rot3_in==1)))||((i5.u36.robot_left==1)&&(i5.u44.A2L_rot2_rs==1)))||(i4.i0.u4.A2L_out==1))))) + (i2.i2.u48.arm1_having_swivel_2==1)) + ((((((((i8.u63.crane_lift==0)||(i8.u74.CL_lift_rs==0))&&(((i5.u35.robot_right==0)||(i5.u35.arm2_pick_up_angle==0))||(i5.u35.A2U_rot3_run==0)))&&((i9.i0.u27.belt2_light_barrier_false==0)||(i9.i0.u27.DB_deliver_run==0)))&&((i5.u35.arm1_pick_up_angle==0)||(i5.u35.A1U_in==0)))&&((i2.i0.u8.ch_A1P_full==0)||(i2.i0.u11.press_ready_for_loading==0)))&&(((i7.u59.arm1_retract_ext==0)||(i7.u55.arm1_forward==0))||(i7.u60.A1U_ext_run==0)))&&((i5.u35.arm1_release_angle==0)||(i5.u35.A1U_rot1_run==0)))) + ((i5.u35.arm2_release_angle==1)&&(i5.u35.A2U_rot3_run==1))) + (((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u45.A2L_rot3_run==1))) + ((i8.u62.crane_mag_on==1)&&(i8.u64.CU_ready_to_ungrasp==1))) + ((i9.i0.u27.belt2_light_barrier_false==1)&&(i9.i0.u27.DB_deliver_run==1))) + ((i5.u35.arm1_pick_up_angle==1)&&(i5.u35.A1U_in==1))) + ((i5.u36.robot_stop==1)&&(i5.u35.A1U_rot2_in==1))) + ((i2.i0.u8.ch_A1P_full==1)&&(i2.i0.u11.press_ready_for_loading==1))) * ((((((i2.i2.u48.arm1_having_swivel_2==1)||((i8.u72.crane_pick_up_height==1)&&(i8.u72.CL_lower_run==1)))||((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u31.FB_trans_run==1)))||(((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u32.FB_deliver_run==1)))||(((i5.u35.arm1_pick_up_angle==1)&&(i5.u36.robot_left==1))&&(i5.u43.A2L_rot1_run==1))) + (!(!((E(!((((((((i5.u35.arm1_pick_up_angle==1)&&(i5.u42.A2L_in==1))||(i9.i1.u1.CU_out==1))||(i9.i1.u0.DB_out==1))||((i6.u38.A2U_extended==1)&&(i6.u39.arm2_magnet_on==1)))||((i3.i0.u21.table_top_pos==1)&&(i3.i0.u21.TU_lift_run==1)))||(((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u32.FB_deliver_run==1)))) U (!(((i6.u41.arm2_retract_ext==1)&&(i6.u47.A2L_ret_run==1))) * !((((((((i5.u35.arm1_pick_up_angle==1)&&(i5.u42.A2L_in==1))||(i9.i1.u1.CU_out==1))||(i9.i1.u0.DB_out==1))||((i6.u38.A2U_extended==1)&&(i6.u39.arm2_magnet_on==1)))||((i3.i0.u21.table_top_pos==1)&&(i3.i0.u21.TU_lift_run==1)))||(((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u32.FB_deliver_run==1)))))) + EG(!((((((((i5.u35.arm1_pick_up_angle==1)&&(i5.u42.A2L_in==1))||(i9.i1.u1.CU_out==1))||(i9.i1.u0.DB_out==1))||((i6.u38.A2U_extended==1)&&(i6.u39.arm2_magnet_on==1)))||((i3.i0.u21.table_top_pos==1)&&(i3.i0.u21.TU_lift_run==1)))||(((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u32.FB_deliver_run==1)))))))) * ((((((((((i0.i1.u29.feed_belt_empty==0)&&((i5.u35.arm2_pick_up_angle==0)||(i5.u44.A2L_rot2_run==0)))&&((i2.i2.u48.swivel==0)||(i4.i0.u2.arm2_waiting_for_swivel_2==0)))&&(((i6.u40.arm2_release_ext==0)||(i6.u37.arm2_backward==0))||(i6.u41.A2U_ret_run==0)))&&(((i3.i0.u21.table_top_pos==0)||(i3.i0.u16.table_upward==0))||(i3.i0.u18.TL_lower_run==0)))&&((i7.u55.arm1_stop==0)||(i5.u35.A1U_rotated==0)))&&((i9.i0.u24.belt2_start==0)||(i9.i0.u27.DB_deliver_rs==0)))&&(((i7.u58.arm1_pick_up_ext==0)||(i7.u55.arm1_backward==0))||(i7.u59.A1L_ret_run==0)))&&((i5.u35.arm2_pick_up_angle==0)||(i5.u51.A1L_in==0)))||((((i4.i0.u4.arm2_having_swivel_1==0)&&((i5.u36.robot_left==0)||(i5.u54.A1L_rot3_rs==0)))&&(((i1.u7.press_down==0)||(i1.u10.press_at_upper_pos==0))||(i1.u9.PU_lower_run==0)))&&((i3.i1.u22.table_unload_angle==0)||(i3.i1.u22.TU_rot_run==0)))))))))) * !((!(EG(((((((i0.i2.u30.belt1_start==1)&&(i0.i2.u31.FB_trans_rs==1))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot2_run==1)))||((i5.u35.A2U_in==1)&&(i5.u35.arm2_pick_up_angle==1)))||((i3.i0.u21.table_top_pos==1)&&(i3.i0.u21.TU_lift_run==1)))||((i1.u7.press_stop==1)&&(i1.u7.blank_forged==1))))) + (((i2.i0.u11.PL_out==0)&&((i5.u35.arm2_pick_up_angle==0)||(i5.u44.A2L_rot2_run==0)))&&((i2.i1.u20.ch_TA1_full==0)||(i2.i1.u20.arm1_store_free==0)))))) * !(((i0.i2.u30.belt1_start==0)||(i0.i2.u31.FB_trans_rs==0))))] = FALSE) * [(((FwdU(Init,TRUE) * !(((EG((((((((((((i0.i0.u19.FB_out==0)&&((i2.i2.u48.swivel==0)||(i2.i1.u20.arm1_waiting_for_swivel_1==0)))&&((i5.u35.arm2_pick_up_angle==0)||(i5.u35.A1U_in==0)))&&((i5.u36.robot_left==0)||(i5.u52.A1L_rot1_rs==0)))&&((i3.i1.u22.table_unload_angle==0)||(i3.i1.u22.TU_rot_run==0)))&&((i6.u37.arm2_backward==0)||(i6.u47.A2L_ret_rs==0)))&&((i5.u35.arm2_release_angle==0)||(i5.u35.A2U_rot1_run==0)))&&((i5.u35.arm1_release_angle==0)||(i5.u42.A2L_in==0)))&&((i3.i0.u16.table_stop_v==0)||(i3.i1.u15.table_at_unload_angle==0)))&&((i1.u9.press_at_lower_pos==0)||(i1.u9.PU_lower_run==0)))&&((i5.u36.robot_stop==0)||(i5.u35.A1U_rot1_in==0)))) + !((E(!(!(!(EX(!((((((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u35.A1U_rot3_run==1))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot3_run==1)))||((i3.i0.u16.table_at_load_angle==1)&&(i3.i0.u16.table_stop_v==1)))))))) U (!((((((((((((((i4.i1.u5.PU_out==1)||((i3.i1.u17.table_load_angle==1)&&(i3.i1.u17.TL_rot_run==1)))||((i5.u36.robot_stop==1)&&(i5.u42.A2L_rot1_in==1)))||(((i3.i0.u21.table_top_pos==1)&&(i3.i0.u16.table_upward==1))&&(i3.i0.u18.TL_lower_run==1)))||((i9.i0.u24.belt2_start==1)&&(i9.i0.u27.DB_deliver_rs==1)))||((i5.u35.robot_right==1)&&(i5.u35.A2U_rot3_rs==1)))||((i7.u55.arm1_forward==1)&&(i7.u60.A1U_ext_rs==1)))||(((i0.i2.u32.belt1_light_barrier_false==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u31.FB_trans_run==1)))||((i9.i0.u24.belt2_stop==1)&&(i9.i0.u24.DB_at_end==1)))&&(((((((((i5.u35.robot_right==1)&&(i5.u35.arm2_pick_up_angle==1))&&(i5.u35.A1U_rot2_run==1))||(i2.i1.u20.TU_out==1))||((i8.u63.crane_lift==1)&&(i8.u74.CL_lift_rs==1)))||((i10.i1.u25.ch_DC_free==1)&&(i4.i2.u23.deposit_belt_occupied==1)))||((i1.u7.press_stop==1)&&(i1.u7.blank_forged==1)))||(((i7.u58.arm1_pick_up_ext==1)&&(i7.u55.arm1_backward==1))&&(i7.u59.A1L_ret_run==1)))||((i7.u55.arm1_backward==1)&&(i7.u61.A1U_ret_rs==1))))&&((i8.u63.crane_lower==0)||(i8.u72.CL_lower_rs==0)))&&((i10.i0.u65.CU_ready_to_transport==0)||(i10.i0.u65.crane_stop_h==0)))&&((i2.i2.u48.swivel==0)||(i2.i0.u50.arm1_waiting_for_swivel_2==0)))) * !(!(!(EX(!((((((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u35.A1U_rot3_run==1))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot3_run==1)))||((i3.i0.u16.table_at_load_angle==1)&&(i3.i0.u16.table_stop_v==1)))))))))) + EG(!(!(!(EX(!((((((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u35.A1U_rot3_run==1))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot3_run==1)))||((i3.i0.u16.table_at_load_angle==1)&&(i3.i0.u16.table_stop_v==1)))))))))))) + ((((((((((!(EG(!(((((((((((i3.i1.u22.table_unload_angle==1)&&(i3.i1.u15.table_right==1))&&(i3.i1.u17.TL_rot_run==1))||(i2.i2.u48.arm1_having_swivel_2==1))||((i5.u35.A2U_rotated==1)&&(i6.u37.arm2_stop==1)))||(((i7.u55.arm1_backward==1)&&(i7.u60.arm1_release_ext==1))&&(i7.u61.A1U_ret_run==1)))||((i6.u46.arm2_pick_up_ext==1)&&(i6.u46.A2L_ext_run==1)))||((i5.u36.robot_stop==1)&&(i5.u35.A1U_rot3_in==1)))||((i5.u36.robot_left==1)&&(i5.u44.A2L_rot2_rs==1)))||(i4.i0.u4.A2L_out==1))))) + (i2.i2.u48.arm1_having_swivel_2==1)) + ((((((((i8.u63.crane_lift==0)||(i8.u74.CL_lift_rs==0))&&(((i5.u35.robot_right==0)||(i5.u35.arm2_pick_up_angle==0))||(i5.u35.A2U_rot3_run==0)))&&((i9.i0.u27.belt2_light_barrier_false==0)||(i9.i0.u27.DB_deliver_run==0)))&&((i5.u35.arm1_pick_up_angle==0)||(i5.u35.A1U_in==0)))&&((i2.i0.u8.ch_A1P_full==0)||(i2.i0.u11.press_ready_for_loading==0)))&&(((i7.u59.arm1_retract_ext==0)||(i7.u55.arm1_forward==0))||(i7.u60.A1U_ext_run==0)))&&((i5.u35.arm1_release_angle==0)||(i5.u35.A1U_rot1_run==0)))) + ((i5.u35.arm2_release_angle==1)&&(i5.u35.A2U_rot3_run==1))) + (((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u45.A2L_rot3_run==1))) + ((i8.u62.crane_mag_on==1)&&(i8.u64.CU_ready_to_ungrasp==1))) + ((i9.i0.u27.belt2_light_barrier_false==1)&&(i9.i0.u27.DB_deliver_run==1))) + ((i5.u35.arm1_pick_up_angle==1)&&(i5.u35.A1U_in==1))) + ((i5.u36.robot_stop==1)&&(i5.u35.A1U_rot2_in==1))) + ((i2.i0.u8.ch_A1P_full==1)&&(i2.i0.u11.press_ready_for_loading==1))) * ((((((i2.i2.u48.arm1_having_swivel_2==1)||((i8.u72.crane_pick_up_height==1)&&(i8.u72.CL_lower_run==1)))||((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u31.FB_trans_run==1)))||(((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u32.FB_deliver_run==1)))||(((i5.u35.arm1_pick_up_angle==1)&&(i5.u36.robot_left==1))&&(i5.u43.A2L_rot1_run==1))) + (!(!((E(!((((((((i5.u35.arm1_pick_up_angle==1)&&(i5.u42.A2L_in==1))||(i9.i1.u1.CU_out==1))||(i9.i1.u0.DB_out==1))||((i6.u38.A2U_extended==1)&&(i6.u39.arm2_magnet_on==1)))||((i3.i0.u21.table_top_pos==1)&&(i3.i0.u21.TU_lift_run==1)))||(((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u32.FB_deliver_run==1)))) U (!(((i6.u41.arm2_retract_ext==1)&&(i6.u47.A2L_ret_run==1))) * !((((((((i5.u35.arm1_pick_up_angle==1)&&(i5.u42.A2L_in==1))||(i9.i1.u1.CU_out==1))||(i9.i1.u0.DB_out==1))||((i6.u38.A2U_extended==1)&&(i6.u39.arm2_magnet_on==1)))||((i3.i0.u21.table_top_pos==1)&&(i3.i0.u21.TU_lift_run==1)))||(((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u32.FB_deliver_run==1)))))) + EG(!((((((((i5.u35.arm1_pick_up_angle==1)&&(i5.u42.A2L_in==1))||(i9.i1.u1.CU_out==1))||(i9.i1.u0.DB_out==1))||((i6.u38.A2U_extended==1)&&(i6.u39.arm2_magnet_on==1)))||((i3.i0.u21.table_top_pos==1)&&(i3.i0.u21.TU_lift_run==1)))||(((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u32.FB_deliver_run==1)))))))) * ((((((((((i0.i1.u29.feed_belt_empty==0)&&((i5.u35.arm2_pick_up_angle==0)||(i5.u44.A2L_rot2_run==0)))&&((i2.i2.u48.swivel==0)||(i4.i0.u2.arm2_waiting_for_swivel_2==0)))&&(((i6.u40.arm2_release_ext==0)||(i6.u37.arm2_backward==0))||(i6.u41.A2U_ret_run==0)))&&(((i3.i0.u21.table_top_pos==0)||(i3.i0.u16.table_upward==0))||(i3.i0.u18.TL_lower_run==0)))&&((i7.u55.arm1_stop==0)||(i5.u35.A1U_rotated==0)))&&((i9.i0.u24.belt2_start==0)||(i9.i0.u27.DB_deliver_rs==0)))&&(((i7.u58.arm1_pick_up_ext==0)||(i7.u55.arm1_backward==0))||(i7.u59.A1L_ret_run==0)))&&((i5.u35.arm2_pick_up_angle==0)||(i5.u51.A1L_in==0)))||((((i4.i0.u4.arm2_having_swivel_1==0)&&((i5.u36.robot_left==0)||(i5.u54.A1L_rot3_rs==0)))&&(((i1.u7.press_down==0)||(i1.u10.press_at_upper_pos==0))||(i1.u9.PU_lower_run==0)))&&((i3.i1.u22.table_unload_angle==0)||(i3.i1.u22.TU_rot_run==0)))))))))) * !((!(EG(((((((i0.i2.u30.belt1_start==1)&&(i0.i2.u31.FB_trans_rs==1))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot2_run==1)))||((i5.u35.A2U_in==1)&&(i5.u35.arm2_pick_up_angle==1)))||((i3.i0.u21.table_top_pos==1)&&(i3.i0.u21.TU_lift_run==1)))||((i1.u7.press_stop==1)&&(i1.u7.blank_forged==1))))) + (((i2.i0.u11.PL_out==0)&&((i5.u35.arm2_pick_up_angle==0)||(i5.u44.A2L_rot2_run==0)))&&((i2.i1.u20.ch_TA1_full==0)||(i2.i1.u20.arm1_store_free==0)))))) * !(((i8.u63.crane_stop_v==0)||(i10.i1.u66.CU_in==0))))] = FALSE) * [(((FwdU(Init,TRUE) * !(((EG((((((((((((i0.i0.u19.FB_out==0)&&((i2.i2.u48.swivel==0)||(i2.i1.u20.arm1_waiting_for_swivel_1==0)))&&((i5.u35.arm2_pick_up_angle==0)||(i5.u35.A1U_in==0)))&&((i5.u36.robot_left==0)||(i5.u52.A1L_rot1_rs==0)))&&((i3.i1.u22.table_unload_angle==0)||(i3.i1.u22.TU_rot_run==0)))&&((i6.u37.arm2_backward==0)||(i6.u47.A2L_ret_rs==0)))&&((i5.u35.arm2_release_angle==0)||(i5.u35.A2U_rot1_run==0)))&&((i5.u35.arm1_release_angle==0)||(i5.u42.A2L_in==0)))&&((i3.i0.u16.table_stop_v==0)||(i3.i1.u15.table_at_unload_angle==0)))&&((i1.u9.press_at_lower_pos==0)||(i1.u9.PU_lower_run==0)))&&((i5.u36.robot_stop==0)||(i5.u35.A1U_rot1_in==0)))) + !((E(!(!(!(EX(!((((((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u35.A1U_rot3_run==1))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot3_run==1)))||((i3.i0.u16.table_at_load_angle==1)&&(i3.i0.u16.table_stop_v==1)))))))) U (!((((((((((((((i4.i1.u5.PU_out==1)||((i3.i1.u17.table_load_angle==1)&&(i3.i1.u17.TL_rot_run==1)))||((i5.u36.robot_stop==1)&&(i5.u42.A2L_rot1_in==1)))||(((i3.i0.u21.table_top_pos==1)&&(i3.i0.u16.table_upward==1))&&(i3.i0.u18.TL_lower_run==1)))||((i9.i0.u24.belt2_start==1)&&(i9.i0.u27.DB_deliver_rs==1)))||((i5.u35.robot_right==1)&&(i5.u35.A2U_rot3_rs==1)))||((i7.u55.arm1_forward==1)&&(i7.u60.A1U_ext_rs==1)))||(((i0.i2.u32.belt1_light_barrier_false==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u31.FB_trans_run==1)))||((i9.i0.u24.belt2_stop==1)&&(i9.i0.u24.DB_at_end==1)))&&(((((((((i5.u35.robot_right==1)&&(i5.u35.arm2_pick_up_angle==1))&&(i5.u35.A1U_rot2_run==1))||(i2.i1.u20.TU_out==1))||((i8.u63.crane_lift==1)&&(i8.u74.CL_lift_rs==1)))||((i10.i1.u25.ch_DC_free==1)&&(i4.i2.u23.deposit_belt_occupied==1)))||((i1.u7.press_stop==1)&&(i1.u7.blank_forged==1)))||(((i7.u58.arm1_pick_up_ext==1)&&(i7.u55.arm1_backward==1))&&(i7.u59.A1L_ret_run==1)))||((i7.u55.arm1_backward==1)&&(i7.u61.A1U_ret_rs==1))))&&((i8.u63.crane_lower==0)||(i8.u72.CL_lower_rs==0)))&&((i10.i0.u65.CU_ready_to_transport==0)||(i10.i0.u65.crane_stop_h==0)))&&((i2.i2.u48.swivel==0)||(i2.i0.u50.arm1_waiting_for_swivel_2==0)))) * !(!(!(EX(!((((((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u35.A1U_rot3_run==1))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot3_run==1)))||((i3.i0.u16.table_at_load_angle==1)&&(i3.i0.u16.table_stop_v==1)))))))))) + EG(!(!(!(EX(!((((((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u35.A1U_rot3_run==1))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot3_run==1)))||((i3.i0.u16.table_at_load_angle==1)&&(i3.i0.u16.table_stop_v==1)))))))))))) + ((((((((((!(EG(!(((((((((((i3.i1.u22.table_unload_angle==1)&&(i3.i1.u15.table_right==1))&&(i3.i1.u17.TL_rot_run==1))||(i2.i2.u48.arm1_having_swivel_2==1))||((i5.u35.A2U_rotated==1)&&(i6.u37.arm2_stop==1)))||(((i7.u55.arm1_backward==1)&&(i7.u60.arm1_release_ext==1))&&(i7.u61.A1U_ret_run==1)))||((i6.u46.arm2_pick_up_ext==1)&&(i6.u46.A2L_ext_run==1)))||((i5.u36.robot_stop==1)&&(i5.u35.A1U_rot3_in==1)))||((i5.u36.robot_left==1)&&(i5.u44.A2L_rot2_rs==1)))||(i4.i0.u4.A2L_out==1))))) + (i2.i2.u48.arm1_having_swivel_2==1)) + ((((((((i8.u63.crane_lift==0)||(i8.u74.CL_lift_rs==0))&&(((i5.u35.robot_right==0)||(i5.u35.arm2_pick_up_angle==0))||(i5.u35.A2U_rot3_run==0)))&&((i9.i0.u27.belt2_light_barrier_false==0)||(i9.i0.u27.DB_deliver_run==0)))&&((i5.u35.arm1_pick_up_angle==0)||(i5.u35.A1U_in==0)))&&((i2.i0.u8.ch_A1P_full==0)||(i2.i0.u11.press_ready_for_loading==0)))&&(((i7.u59.arm1_retract_ext==0)||(i7.u55.arm1_forward==0))||(i7.u60.A1U_ext_run==0)))&&((i5.u35.arm1_release_angle==0)||(i5.u35.A1U_rot1_run==0)))) + ((i5.u35.arm2_release_angle==1)&&(i5.u35.A2U_rot3_run==1))) + (((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u45.A2L_rot3_run==1))) + ((i8.u62.crane_mag_on==1)&&(i8.u64.CU_ready_to_ungrasp==1))) + ((i9.i0.u27.belt2_light_barrier_false==1)&&(i9.i0.u27.DB_deliver_run==1))) + ((i5.u35.arm1_pick_up_angle==1)&&(i5.u35.A1U_in==1))) + ((i5.u36.robot_stop==1)&&(i5.u35.A1U_rot2_in==1))) + ((i2.i0.u8.ch_A1P_full==1)&&(i2.i0.u11.press_ready_for_loading==1))) * ((((((i2.i2.u48.arm1_having_swivel_2==1)||((i8.u72.crane_pick_up_height==1)&&(i8.u72.CL_lower_run==1)))||((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u31.FB_trans_run==1)))||(((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u32.FB_deliver_run==1)))||(((i5.u35.arm1_pick_up_angle==1)&&(i5.u36.robot_left==1))&&(i5.u43.A2L_rot1_run==1))) + (!(!((E(!((((((((i5.u35.arm1_pick_up_angle==1)&&(i5.u42.A2L_in==1))||(i9.i1.u1.CU_out==1))||(i9.i1.u0.DB_out==1))||((i6.u38.A2U_extended==1)&&(i6.u39.arm2_magnet_on==1)))||((i3.i0.u21.table_top_pos==1)&&(i3.i0.u21.TU_lift_run==1)))||(((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u32.FB_deliver_run==1)))) U (!(((i6.u41.arm2_retract_ext==1)&&(i6.u47.A2L_ret_run==1))) * !((((((((i5.u35.arm1_pick_up_angle==1)&&(i5.u42.A2L_in==1))||(i9.i1.u1.CU_out==1))||(i9.i1.u0.DB_out==1))||((i6.u38.A2U_extended==1)&&(i6.u39.arm2_magnet_on==1)))||((i3.i0.u21.table_top_pos==1)&&(i3.i0.u21.TU_lift_run==1)))||(((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u32.FB_deliver_run==1)))))) + EG(!((((((((i5.u35.arm1_pick_up_angle==1)&&(i5.u42.A2L_in==1))||(i9.i1.u1.CU_out==1))||(i9.i1.u0.DB_out==1))||((i6.u38.A2U_extended==1)&&(i6.u39.arm2_magnet_on==1)))||((i3.i0.u21.table_top_pos==1)&&(i3.i0.u21.TU_lift_run==1)))||(((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u32.FB_deliver_run==1)))))))) * ((((((((((i0.i1.u29.feed_belt_empty==0)&&((i5.u35.arm2_pick_up_angle==0)||(i5.u44.A2L_rot2_run==0)))&&((i2.i2.u48.swivel==0)||(i4.i0.u2.arm2_waiting_for_swivel_2==0)))&&(((i6.u40.arm2_release_ext==0)||(i6.u37.arm2_backward==0))||(i6.u41.A2U_ret_run==0)))&&(((i3.i0.u21.table_top_pos==0)||(i3.i0.u16.table_upward==0))||(i3.i0.u18.TL_lower_run==0)))&&((i7.u55.arm1_stop==0)||(i5.u35.A1U_rotated==0)))&&((i9.i0.u24.belt2_start==0)||(i9.i0.u27.DB_deliver_rs==0)))&&(((i7.u58.arm1_pick_up_ext==0)||(i7.u55.arm1_backward==0))||(i7.u59.A1L_ret_run==0)))&&((i5.u35.arm2_pick_up_angle==0)||(i5.u51.A1L_in==0)))||((((i4.i0.u4.arm2_having_swivel_1==0)&&((i5.u36.robot_left==0)||(i5.u54.A1L_rot3_rs==0)))&&(((i1.u7.press_down==0)||(i1.u10.press_at_upper_pos==0))||(i1.u9.PU_lower_run==0)))&&((i3.i1.u22.table_unload_angle==0)||(i3.i1.u22.TU_rot_run==0)))))))))) * !((!(EG(((((((i0.i2.u30.belt1_start==1)&&(i0.i2.u31.FB_trans_rs==1))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot2_run==1)))||((i5.u35.A2U_in==1)&&(i5.u35.arm2_pick_up_angle==1)))||((i3.i0.u21.table_top_pos==1)&&(i3.i0.u21.TU_lift_run==1)))||((i1.u7.press_stop==1)&&(i1.u7.blank_forged==1))))) + (((i2.i0.u11.PL_out==0)&&((i5.u35.arm2_pick_up_angle==0)||(i5.u44.A2L_rot2_run==0)))&&((i2.i1.u20.ch_TA1_full==0)||(i2.i1.u20.arm1_store_free==0)))))) * !(((i5.u36.robot_left==0)||(i5.u52.A1L_rot1_rs==0))))] = FALSE) * [(((FwdU(Init,TRUE) * !(((EG((((((((((((i0.i0.u19.FB_out==0)&&((i2.i2.u48.swivel==0)||(i2.i1.u20.arm1_waiting_for_swivel_1==0)))&&((i5.u35.arm2_pick_up_angle==0)||(i5.u35.A1U_in==0)))&&((i5.u36.robot_left==0)||(i5.u52.A1L_rot1_rs==0)))&&((i3.i1.u22.table_unload_angle==0)||(i3.i1.u22.TU_rot_run==0)))&&((i6.u37.arm2_backward==0)||(i6.u47.A2L_ret_rs==0)))&&((i5.u35.arm2_release_angle==0)||(i5.u35.A2U_rot1_run==0)))&&((i5.u35.arm1_release_angle==0)||(i5.u42.A2L_in==0)))&&((i3.i0.u16.table_stop_v==0)||(i3.i1.u15.table_at_unload_angle==0)))&&((i1.u9.press_at_lower_pos==0)||(i1.u9.PU_lower_run==0)))&&((i5.u36.robot_stop==0)||(i5.u35.A1U_rot1_in==0)))) + !((E(!(!(!(EX(!((((((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u35.A1U_rot3_run==1))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot3_run==1)))||((i3.i0.u16.table_at_load_angle==1)&&(i3.i0.u16.table_stop_v==1)))))))) U (!((((((((((((((i4.i1.u5.PU_out==1)||((i3.i1.u17.table_load_angle==1)&&(i3.i1.u17.TL_rot_run==1)))||((i5.u36.robot_stop==1)&&(i5.u42.A2L_rot1_in==1)))||(((i3.i0.u21.table_top_pos==1)&&(i3.i0.u16.table_upward==1))&&(i3.i0.u18.TL_lower_run==1)))||((i9.i0.u24.belt2_start==1)&&(i9.i0.u27.DB_deliver_rs==1)))||((i5.u35.robot_right==1)&&(i5.u35.A2U_rot3_rs==1)))||((i7.u55.arm1_forward==1)&&(i7.u60.A1U_ext_rs==1)))||(((i0.i2.u32.belt1_light_barrier_false==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u31.FB_trans_run==1)))||((i9.i0.u24.belt2_stop==1)&&(i9.i0.u24.DB_at_end==1)))&&(((((((((i5.u35.robot_right==1)&&(i5.u35.arm2_pick_up_angle==1))&&(i5.u35.A1U_rot2_run==1))||(i2.i1.u20.TU_out==1))||((i8.u63.crane_lift==1)&&(i8.u74.CL_lift_rs==1)))||((i10.i1.u25.ch_DC_free==1)&&(i4.i2.u23.deposit_belt_occupied==1)))||((i1.u7.press_stop==1)&&(i1.u7.blank_forged==1)))||(((i7.u58.arm1_pick_up_ext==1)&&(i7.u55.arm1_backward==1))&&(i7.u59.A1L_ret_run==1)))||((i7.u55.arm1_backward==1)&&(i7.u61.A1U_ret_rs==1))))&&((i8.u63.crane_lower==0)||(i8.u72.CL_lower_rs==0)))&&((i10.i0.u65.CU_ready_to_transport==0)||(i10.i0.u65.crane_stop_h==0)))&&((i2.i2.u48.swivel==0)||(i2.i0.u50.arm1_waiting_for_swivel_2==0)))) * !(!(!(EX(!((((((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u35.A1U_rot3_run==1))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot3_run==1)))||((i3.i0.u16.table_at_load_angle==1)&&(i3.i0.u16.table_stop_v==1)))))))))) + EG(!(!(!(EX(!((((((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u35.A1U_rot3_run==1))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot3_run==1)))||((i3.i0.u16.table_at_load_angle==1)&&(i3.i0.u16.table_stop_v==1)))))))))))) + ((((((((((!(EG(!(((((((((((i3.i1.u22.table_unload_angle==1)&&(i3.i1.u15.table_right==1))&&(i3.i1.u17.TL_rot_run==1))||(i2.i2.u48.arm1_having_swivel_2==1))||((i5.u35.A2U_rotated==1)&&(i6.u37.arm2_stop==1)))||(((i7.u55.arm1_backward==1)&&(i7.u60.arm1_release_ext==1))&&(i7.u61.A1U_ret_run==1)))||((i6.u46.arm2_pick_up_ext==1)&&(i6.u46.A2L_ext_run==1)))||((i5.u36.robot_stop==1)&&(i5.u35.A1U_rot3_in==1)))||((i5.u36.robot_left==1)&&(i5.u44.A2L_rot2_rs==1)))||(i4.i0.u4.A2L_out==1))))) + (i2.i2.u48.arm1_having_swivel_2==1)) + ((((((((i8.u63.crane_lift==0)||(i8.u74.CL_lift_rs==0))&&(((i5.u35.robot_right==0)||(i5.u35.arm2_pick_up_angle==0))||(i5.u35.A2U_rot3_run==0)))&&((i9.i0.u27.belt2_light_barrier_false==0)||(i9.i0.u27.DB_deliver_run==0)))&&((i5.u35.arm1_pick_up_angle==0)||(i5.u35.A1U_in==0)))&&((i2.i0.u8.ch_A1P_full==0)||(i2.i0.u11.press_ready_for_loading==0)))&&(((i7.u59.arm1_retract_ext==0)||(i7.u55.arm1_forward==0))||(i7.u60.A1U_ext_run==0)))&&((i5.u35.arm1_release_angle==0)||(i5.u35.A1U_rot1_run==0)))) + ((i5.u35.arm2_release_angle==1)&&(i5.u35.A2U_rot3_run==1))) + (((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u45.A2L_rot3_run==1))) + ((i8.u62.crane_mag_on==1)&&(i8.u64.CU_ready_to_ungrasp==1))) + ((i9.i0.u27.belt2_light_barrier_false==1)&&(i9.i0.u27.DB_deliver_run==1))) + ((i5.u35.arm1_pick_up_angle==1)&&(i5.u35.A1U_in==1))) + ((i5.u36.robot_stop==1)&&(i5.u35.A1U_rot2_in==1))) + ((i2.i0.u8.ch_A1P_full==1)&&(i2.i0.u11.press_ready_for_loading==1))) * ((((((i2.i2.u48.arm1_having_swivel_2==1)||((i8.u72.crane_pick_up_height==1)&&(i8.u72.CL_lower_run==1)))||((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u31.FB_trans_run==1)))||(((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u32.FB_deliver_run==1)))||(((i5.u35.arm1_pick_up_angle==1)&&(i5.u36.robot_left==1))&&(i5.u43.A2L_rot1_run==1))) + (!(!((E(!((((((((i5.u35.arm1_pick_up_angle==1)&&(i5.u42.A2L_in==1))||(i9.i1.u1.CU_out==1))||(i9.i1.u0.DB_out==1))||((i6.u38.A2U_extended==1)&&(i6.u39.arm2_magnet_on==1)))||((i3.i0.u21.table_top_pos==1)&&(i3.i0.u21.TU_lift_run==1)))||(((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u32.FB_deliver_run==1)))) U (!(((i6.u41.arm2_retract_ext==1)&&(i6.u47.A2L_ret_run==1))) * !((((((((i5.u35.arm1_pick_up_angle==1)&&(i5.u42.A2L_in==1))||(i9.i1.u1.CU_out==1))||(i9.i1.u0.DB_out==1))||((i6.u38.A2U_extended==1)&&(i6.u39.arm2_magnet_on==1)))||((i3.i0.u21.table_top_pos==1)&&(i3.i0.u21.TU_lift_run==1)))||(((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u32.FB_deliver_run==1)))))) + EG(!((((((((i5.u35.arm1_pick_up_angle==1)&&(i5.u42.A2L_in==1))||(i9.i1.u1.CU_out==1))||(i9.i1.u0.DB_out==1))||((i6.u38.A2U_extended==1)&&(i6.u39.arm2_magnet_on==1)))||((i3.i0.u21.table_top_pos==1)&&(i3.i0.u21.TU_lift_run==1)))||(((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u32.FB_deliver_run==1)))))))) * ((((((((((i0.i1.u29.feed_belt_empty==0)&&((i5.u35.arm2_pick_up_angle==0)||(i5.u44.A2L_rot2_run==0)))&&((i2.i2.u48.swivel==0)||(i4.i0.u2.arm2_waiting_for_swivel_2==0)))&&(((i6.u40.arm2_release_ext==0)||(i6.u37.arm2_backward==0))||(i6.u41.A2U_ret_run==0)))&&(((i3.i0.u21.table_top_pos==0)||(i3.i0.u16.table_upward==0))||(i3.i0.u18.TL_lower_run==0)))&&((i7.u55.arm1_stop==0)||(i5.u35.A1U_rotated==0)))&&((i9.i0.u24.belt2_start==0)||(i9.i0.u27.DB_deliver_rs==0)))&&(((i7.u58.arm1_pick_up_ext==0)||(i7.u55.arm1_backward==0))||(i7.u59.A1L_ret_run==0)))&&((i5.u35.arm2_pick_up_angle==0)||(i5.u51.A1L_in==0)))||((((i4.i0.u4.arm2_having_swivel_1==0)&&((i5.u36.robot_left==0)||(i5.u54.A1L_rot3_rs==0)))&&(((i1.u7.press_down==0)||(i1.u10.press_at_upper_pos==0))||(i1.u9.PU_lower_run==0)))&&((i3.i1.u22.table_unload_angle==0)||(i3.i1.u22.TU_rot_run==0)))))))))) * !((!(EG(((((((i0.i2.u30.belt1_start==1)&&(i0.i2.u31.FB_trans_rs==1))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot2_run==1)))||((i5.u35.A2U_in==1)&&(i5.u35.arm2_pick_up_angle==1)))||((i3.i0.u21.table_top_pos==1)&&(i3.i0.u21.TU_lift_run==1)))||((i1.u7.press_stop==1)&&(i1.u7.blank_forged==1))))) + (((i2.i0.u11.PL_out==0)&&((i5.u35.arm2_pick_up_angle==0)||(i5.u44.A2L_rot2_run==0)))&&((i2.i1.u20.ch_TA1_full==0)||(i2.i1.u20.arm1_store_free==0)))))) * !(((i1.u12.press_at_middle_pos==0)||(i1.u12.PL_lower_run==0))))] = FALSE) * [(((FwdU(Init,TRUE) * !(((EG((((((((((((i0.i0.u19.FB_out==0)&&((i2.i2.u48.swivel==0)||(i2.i1.u20.arm1_waiting_for_swivel_1==0)))&&((i5.u35.arm2_pick_up_angle==0)||(i5.u35.A1U_in==0)))&&((i5.u36.robot_left==0)||(i5.u52.A1L_rot1_rs==0)))&&((i3.i1.u22.table_unload_angle==0)||(i3.i1.u22.TU_rot_run==0)))&&((i6.u37.arm2_backward==0)||(i6.u47.A2L_ret_rs==0)))&&((i5.u35.arm2_release_angle==0)||(i5.u35.A2U_rot1_run==0)))&&((i5.u35.arm1_release_angle==0)||(i5.u42.A2L_in==0)))&&((i3.i0.u16.table_stop_v==0)||(i3.i1.u15.table_at_unload_angle==0)))&&((i1.u9.press_at_lower_pos==0)||(i1.u9.PU_lower_run==0)))&&((i5.u36.robot_stop==0)||(i5.u35.A1U_rot1_in==0)))) + !((E(!(!(!(EX(!((((((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u35.A1U_rot3_run==1))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot3_run==1)))||((i3.i0.u16.table_at_load_angle==1)&&(i3.i0.u16.table_stop_v==1)))))))) U (!((((((((((((((i4.i1.u5.PU_out==1)||((i3.i1.u17.table_load_angle==1)&&(i3.i1.u17.TL_rot_run==1)))||((i5.u36.robot_stop==1)&&(i5.u42.A2L_rot1_in==1)))||(((i3.i0.u21.table_top_pos==1)&&(i3.i0.u16.table_upward==1))&&(i3.i0.u18.TL_lower_run==1)))||((i9.i0.u24.belt2_start==1)&&(i9.i0.u27.DB_deliver_rs==1)))||((i5.u35.robot_right==1)&&(i5.u35.A2U_rot3_rs==1)))||((i7.u55.arm1_forward==1)&&(i7.u60.A1U_ext_rs==1)))||(((i0.i2.u32.belt1_light_barrier_false==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u31.FB_trans_run==1)))||((i9.i0.u24.belt2_stop==1)&&(i9.i0.u24.DB_at_end==1)))&&(((((((((i5.u35.robot_right==1)&&(i5.u35.arm2_pick_up_angle==1))&&(i5.u35.A1U_rot2_run==1))||(i2.i1.u20.TU_out==1))||((i8.u63.crane_lift==1)&&(i8.u74.CL_lift_rs==1)))||((i10.i1.u25.ch_DC_free==1)&&(i4.i2.u23.deposit_belt_occupied==1)))||((i1.u7.press_stop==1)&&(i1.u7.blank_forged==1)))||(((i7.u58.arm1_pick_up_ext==1)&&(i7.u55.arm1_backward==1))&&(i7.u59.A1L_ret_run==1)))||((i7.u55.arm1_backward==1)&&(i7.u61.A1U_ret_rs==1))))&&((i8.u63.crane_lower==0)||(i8.u72.CL_lower_rs==0)))&&((i10.i0.u65.CU_ready_to_transport==0)||(i10.i0.u65.crane_stop_h==0)))&&((i2.i2.u48.swivel==0)||(i2.i0.u50.arm1_waiting_for_swivel_2==0)))) * !(!(!(EX(!((((((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u35.A1U_rot3_run==1))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot3_run==1)))||((i3.i0.u16.table_at_load_angle==1)&&(i3.i0.u16.table_stop_v==1)))))))))) + EG(!(!(!(EX(!((((((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u35.A1U_rot3_run==1))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot3_run==1)))||((i3.i0.u16.table_at_load_angle==1)&&(i3.i0.u16.table_stop_v==1)))))))))))) + ((((((((((!(EG(!(((((((((((i3.i1.u22.table_unload_angle==1)&&(i3.i1.u15.table_right==1))&&(i3.i1.u17.TL_rot_run==1))||(i2.i2.u48.arm1_having_swivel_2==1))||((i5.u35.A2U_rotated==1)&&(i6.u37.arm2_stop==1)))||(((i7.u55.arm1_backward==1)&&(i7.u60.arm1_release_ext==1))&&(i7.u61.A1U_ret_run==1)))||((i6.u46.arm2_pick_up_ext==1)&&(i6.u46.A2L_ext_run==1)))||((i5.u36.robot_stop==1)&&(i5.u35.A1U_rot3_in==1)))||((i5.u36.robot_left==1)&&(i5.u44.A2L_rot2_rs==1)))||(i4.i0.u4.A2L_out==1))))) + (i2.i2.u48.arm1_having_swivel_2==1)) + ((((((((i8.u63.crane_lift==0)||(i8.u74.CL_lift_rs==0))&&(((i5.u35.robot_right==0)||(i5.u35.arm2_pick_up_angle==0))||(i5.u35.A2U_rot3_run==0)))&&((i9.i0.u27.belt2_light_barrier_false==0)||(i9.i0.u27.DB_deliver_run==0)))&&((i5.u35.arm1_pick_up_angle==0)||(i5.u35.A1U_in==0)))&&((i2.i0.u8.ch_A1P_full==0)||(i2.i0.u11.press_ready_for_loading==0)))&&(((i7.u59.arm1_retract_ext==0)||(i7.u55.arm1_forward==0))||(i7.u60.A1U_ext_run==0)))&&((i5.u35.arm1_release_angle==0)||(i5.u35.A1U_rot1_run==0)))) + ((i5.u35.arm2_release_angle==1)&&(i5.u35.A2U_rot3_run==1))) + (((i5.u35.arm2_release_angle==1)&&(i5.u36.robot_left==1))&&(i5.u45.A2L_rot3_run==1))) + ((i8.u62.crane_mag_on==1)&&(i8.u64.CU_ready_to_ungrasp==1))) + ((i9.i0.u27.belt2_light_barrier_false==1)&&(i9.i0.u27.DB_deliver_run==1))) + ((i5.u35.arm1_pick_up_angle==1)&&(i5.u35.A1U_in==1))) + ((i5.u36.robot_stop==1)&&(i5.u35.A1U_rot2_in==1))) + ((i2.i0.u8.ch_A1P_full==1)&&(i2.i0.u11.press_ready_for_loading==1))) * ((((((i2.i2.u48.arm1_having_swivel_2==1)||((i8.u72.crane_pick_up_height==1)&&(i8.u72.CL_lower_run==1)))||((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u31.FB_trans_run==1)))||(((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u32.FB_deliver_run==1)))||(((i5.u35.arm1_pick_up_angle==1)&&(i5.u36.robot_left==1))&&(i5.u43.A2L_rot1_run==1))) + (!(!((E(!((((((((i5.u35.arm1_pick_up_angle==1)&&(i5.u42.A2L_in==1))||(i9.i1.u1.CU_out==1))||(i9.i1.u0.DB_out==1))||((i6.u38.A2U_extended==1)&&(i6.u39.arm2_magnet_on==1)))||((i3.i0.u21.table_top_pos==1)&&(i3.i0.u21.TU_lift_run==1)))||(((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u32.FB_deliver_run==1)))) U (!(((i6.u41.arm2_retract_ext==1)&&(i6.u47.A2L_ret_run==1))) * !((((((((i5.u35.arm1_pick_up_angle==1)&&(i5.u42.A2L_in==1))||(i9.i1.u1.CU_out==1))||(i9.i1.u0.DB_out==1))||((i6.u38.A2U_extended==1)&&(i6.u39.arm2_magnet_on==1)))||((i3.i0.u21.table_top_pos==1)&&(i3.i0.u21.TU_lift_run==1)))||(((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u32.FB_deliver_run==1)))))) + EG(!((((((((i5.u35.arm1_pick_up_angle==1)&&(i5.u42.A2L_in==1))||(i9.i1.u1.CU_out==1))||(i9.i1.u0.DB_out==1))||((i6.u38.A2U_extended==1)&&(i6.u39.arm2_magnet_on==1)))||((i3.i0.u21.table_top_pos==1)&&(i3.i0.u21.TU_lift_run==1)))||(((i0.i2.u31.belt1_light_barrier_true==1)&&(i0.i2.u30.belt1_start==1))&&(i0.i2.u32.FB_deliver_run==1)))))))) * ((((((((((i0.i1.u29.feed_belt_empty==0)&&((i5.u35.arm2_pick_up_angle==0)||(i5.u44.A2L_rot2_run==0)))&&((i2.i2.u48.swivel==0)||(i4.i0.u2.arm2_waiting_for_swivel_2==0)))&&(((i6.u40.arm2_release_ext==0)||(i6.u37.arm2_backward==0))||(i6.u41.A2U_ret_run==0)))&&(((i3.i0.u21.table_top_pos==0)||(i3.i0.u16.table_upward==0))||(i3.i0.u18.TL_lower_run==0)))&&((i7.u55.arm1_stop==0)||(i5.u35.A1U_rotated==0)))&&((i9.i0.u24.belt2_start==0)||(i9.i0.u27.DB_deliver_rs==0)))&&(((i7.u58.arm1_pick_up_ext==0)||(i7.u55.arm1_backward==0))||(i7.u59.A1L_ret_run==0)))&&((i5.u35.arm2_pick_up_angle==0)||(i5.u51.A1L_in==0)))||((((i4.i0.u4.arm2_having_swivel_1==0)&&((i5.u36.robot_left==0)||(i5.u54.A1L_rot3_rs==0)))&&(((i1.u7.press_down==0)||(i1.u10.press_at_upper_pos==0))||(i1.u9.PU_lower_run==0)))&&((i3.i1.u22.table_unload_angle==0)||(i3.i1.u22.TU_rot_run==0)))))))))) * !((!(EG(((((((i0.i2.u30.belt1_start==1)&&(i0.i2.u31.FB_trans_rs==1))||((i5.u35.arm1_release_angle==1)&&(i5.u35.A1U_rot2_run==1)))||((i5.u35.A2U_in==1)&&(i5.u35.arm2_pick_up_angle==1)))||((i3.i0.u21.table_top_pos==1)&&(i3.i0.u21.TU_lift_run==1)))||((i1.u7.press_stop==1)&&(i1.u7.blank_forged==1))))) + (((i2.i0.u11.PL_out==0)&&((i5.u35.arm2_pick_up_angle==0)||(i5.u44.A2L_rot2_run==0)))&&((i2.i1.u20.ch_TA1_full==0)||(i2.i1.u20.arm1_store_free==0)))))) * !(((i5.u36.robot_stop==0)||(i5.u35.A1U_rot1_in==0))))] = FALSE))
Using saturation style SCC detection
Using saturation style SCC detection
Using saturation style SCC detection
(forward)formula 9,0,29.7347,1023000,1,0,2.33406e+06,19044,6473,2.14314e+06,1182,81228,3272719
FORMULA ParamProductionCell-PT-3-CTLFireability-14 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL USE_NUPN
Formula is FALSE !
***************************************
BK_STOP 1620979958720
--------------------
content from stderr:
+ export BINDIR=/home/mcc/BenchKit/bin//../
+ BINDIR=/home/mcc/BenchKit/bin//../
++ pwd
+ export MODEL=/home/mcc/execution
+ MODEL=/home/mcc/execution
+ [[ CTLFireability = StateSpace ]]
+ /home/mcc/BenchKit/bin//..//runeclipse.sh /home/mcc/execution CTLFireability -its -ltsmin -greatspnpath /home/mcc/BenchKit/bin//..//greatspn/ -order META -manyOrder -smt -timeout 3600
+ ulimit -s 65536
+ [[ -z '' ]]
+ export LTSMIN_MEM_SIZE=8589934592
+ LTSMIN_MEM_SIZE=8589934592
++ cut -d . -f 9
++ ls /home/mcc/BenchKit/bin//..//itstools/plugins/fr.lip6.move.gal.application.pnmcc_1.0.0.202104292328.jar
+ VERSION=0
+ echo 'Running Version 0'
+ /home/mcc/BenchKit/bin//..//itstools/its-tools -data /home/mcc/execution/workspace -pnfolder /home/mcc/execution -examination CTLFireability -spotpath /home/mcc/BenchKit/bin//..//ltlfilt -z3path /home/mcc/BenchKit/bin//..//z3/bin/z3 -yices2path /home/mcc/BenchKit/bin//..//yices/bin/yices -its -ltsmin -greatspnpath /home/mcc/BenchKit/bin//..//greatspn/ -order META -manyOrder -smt -timeout 3600 -vmargs -Dosgi.locking=none -Declipse.stateSaveDelayInterval=-1 -Dosgi.configuration.area=/tmp/.eclipse -Xss128m -Xms40m -Xmx16000m
Sequence of Actions to be Executed by the VM
This is useful if one wants to reexecute the tool in the VM from the submitted image disk.
set -x
# this is for BenchKit: configuration of major elements for the test
export BK_INPUT="ParamProductionCell-PT-3"
export BK_EXAMINATION="CTLFireability"
export BK_TOOL="itstools"
export BK_RESULT_DIR="/tmp/BK_RESULTS/OUTPUTS"
export BK_TIME_CONFINEMENT="3600"
export BK_MEMORY_CONFINEMENT="16384"
export BK_BIN_PATH="/home/mcc/BenchKit/bin/"
# this is specific to your benchmark or test
export BIN_DIR="$HOME/BenchKit/bin"
# remove the execution directoty if it exists (to avoid increse of .vmdk images)
if [ -d execution ] ; then
rm -rf execution
fi
# this is for BenchKit: explicit launching of the test
echo "====================================================================="
echo " Generated by BenchKit 2-4028"
echo " Executing tool itstools"
echo " Input is ParamProductionCell-PT-3, examination is CTLFireability"
echo " Time confinement is $BK_TIME_CONFINEMENT seconds"
echo " Memory confinement is 16384 MBytes"
echo " Number of cores is 4"
echo " Run identifier is r140-tall-162089127800386"
echo "====================================================================="
echo
echo "--------------------"
echo "preparation of the directory to be used:"
tar xzf /home/mcc/BenchKit/INPUTS/ParamProductionCell-PT-3.tgz
mv ParamProductionCell-PT-3 execution
cd execution
if [ "CTLFireability" = "ReachabilityDeadlock" ] || [ "CTLFireability" = "UpperBounds" ] || [ "CTLFireability" = "QuasiLiveness" ] || [ "CTLFireability" = "StableMarking" ] || [ "CTLFireability" = "Liveness" ] || [ "CTLFireability" = "OneSafe" ] || [ "CTLFireability" = "StateSpace" ]; then
rm -f GenericPropertiesVerdict.xml
fi
pwd
ls -lh
echo
echo "--------------------"
echo "content from stdout:"
echo
echo "=== Data for post analysis generated by BenchKit (invocation template)"
echo
if [ "CTLFireability" = "UpperBounds" ] ; then
echo "The expected result is a vector of positive values"
echo NUM_VECTOR
elif [ "CTLFireability" != "StateSpace" ] ; then
echo "The expected result is a vector of booleans"
echo BOOL_VECTOR
else
echo "no data necessary for post analysis"
fi
echo
if [ -f "CTLFireability.txt" ] ; then
echo "here is the order used to build the result vector(from text file)"
for x in $(grep Property CTLFireability.txt | cut -d ' ' -f 2 | sort -u) ; do
echo "FORMULA_NAME $x"
done
elif [ -f "CTLFireability.xml" ] ; then # for cunf (txt files deleted;-)
echo echo "here is the order used to build the result vector(from xml file)"
for x in $(grep '
echo "FORMULA_NAME $x"
done
elif [ "CTLFireability" = "ReachabilityDeadlock" ] || [ "CTLFireability" = "QuasiLiveness" ] || [ "CTLFireability" = "StableMarking" ] || [ "CTLFireability" = "Liveness" ] || [ "CTLFireability" = "OneSafe" ] ; then
echo "FORMULA_NAME CTLFireability"
fi
echo
echo "=== Now, execution of the tool begins"
echo
echo -n "BK_START "
date -u +%s%3N
echo
timeout -s 9 $BK_TIME_CONFINEMENT bash -c "/home/mcc/BenchKit/BenchKit_head.sh 2> STDERR ; echo ; echo -n \"BK_STOP \" ; date -u +%s%3N"
if [ $? -eq 137 ] ; then
echo
echo "BK_TIME_CONFINEMENT_REACHED"
fi
echo
echo "--------------------"
echo "content from stderr:"
echo
cat STDERR ;