
About the Execution of ITS-Tools for RobotManipulation-PT-00010
| Execution Summary | |||||
| Max Memory Used (MB) |
Time wait (ms) | CPU Usage (ms) | I/O Wait (ms) | Computed Result | Execution Status |
| 15746.250 | 421916.00 | 433447.00 | 148.50 | TFFTTTTTFFTFTTTF | normal |
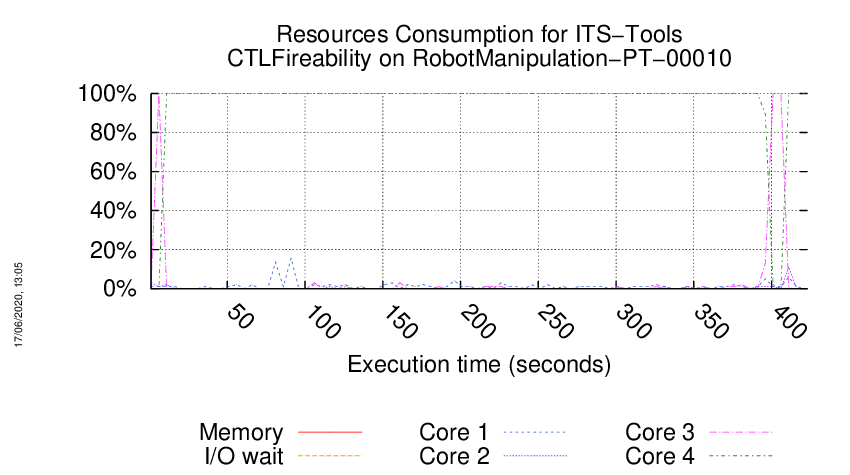
Execution Chart
We display below the execution chart for this examination (boot time has been removed).
Trace from the execution
Formatting '/data/fko/mcc2020-input.r156-oct2-158972913700164.qcow2', fmt=qcow2 size=4294967296 backing_file=/data/fko/mcc2020-input.qcow2 cluster_size=65536 lazy_refcounts=off refcount_bits=16
Waiting for the VM to be ready (probing ssh)
.............................................................................................................................................................................................................................................................................................................................................................................
=====================================================================
Generated by BenchKit 2-4028
Executing tool itstools
Input is RobotManipulation-PT-00010, examination is CTLFireability
Time confinement is 3600 seconds
Memory confinement is 16384 MBytes
Number of cores is 4
Run identifier is r156-oct2-158972913700164
=====================================================================
--------------------
preparation of the directory to be used:
/home/mcc/execution
total 184K
-rw-r--r-- 1 mcc users 3.8K Apr 12 10:57 CTLCardinality.txt
-rw-r--r-- 1 mcc users 20K Apr 12 10:57 CTLCardinality.xml
-rw-r--r-- 1 mcc users 2.6K Apr 11 12:04 CTLFireability.txt
-rw-r--r-- 1 mcc users 15K Apr 11 12:04 CTLFireability.xml
-rw-r--r-- 1 mcc users 4.0K Mar 24 05:38 GenericPropertiesDefinition.xml
-rw-r--r-- 1 mcc users 6.2K Mar 24 05:38 GenericPropertiesVerdict.xml
-rw-r--r-- 1 mcc users 3.7K Apr 14 12:49 LTLCardinality.txt
-rw-r--r-- 1 mcc users 25K Apr 28 14:02 LTLCardinality.xml
-rw-r--r-- 1 mcc users 2.3K Apr 14 12:50 LTLFireability.txt
-rw-r--r-- 1 mcc users 18K Apr 28 14:02 LTLFireability.xml
-rw-r--r-- 1 mcc users 3.8K Apr 10 16:33 ReachabilityCardinality.txt
-rw-r--r-- 1 mcc users 17K Apr 10 16:33 ReachabilityCardinality.xml
-rw-r--r-- 1 mcc users 3.0K Apr 9 22:58 ReachabilityFireability.txt
-rw-r--r-- 1 mcc users 16K Apr 9 22:58 ReachabilityFireability.xml
-rw-r--r-- 1 mcc users 1.8K Apr 10 22:28 UpperBounds.txt
-rw-r--r-- 1 mcc users 3.8K Apr 10 22:28 UpperBounds.xml
-rw-r--r-- 1 mcc users 6 Mar 24 05:38 equiv_col
-rw-r--r-- 1 mcc users 6 Mar 24 05:38 instance
-rw-r--r-- 1 mcc users 6 Mar 24 05:38 iscolored
-rw-r--r-- 1 mcc users 6.4K Mar 24 05:38 model.pnml
--------------------
content from stdout:
=== Data for post analysis generated by BenchKit (invocation template)
The expected result is a vector of booleans
BOOL_VECTOR
here is the order used to build the result vector(from text file)
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-00
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-01
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-02
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-03
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-04
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-05
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-06
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-07
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-08
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-09
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-10
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-11
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-12
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-13
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-14
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-15
=== Now, execution of the tool begins
BK_START 1589878167255
[2020-05-19 08:49:28] [INFO ] Running its-tools with arguments : [-pnfolder, /home/mcc/execution, -examination, CTLFireability, -z3path, /home/mcc/BenchKit//z3/bin/z3, -yices2path, /home/mcc/BenchKit//yices/bin/yices, -its, -ltsminpath, /home/mcc/BenchKit//lts_install_dir/, -greatspnpath, /home/mcc/BenchKit//greatspn/, -order, META, -manyOrder, -smt, -timeout, 3600]
[2020-05-19 08:49:28] [INFO ] Parsing pnml file : /home/mcc/execution/model.pnml
[2020-05-19 08:49:28] [INFO ] Load time of PNML (sax parser for PT used): 20 ms
[2020-05-19 08:49:28] [INFO ] Transformed 15 places.
[2020-05-19 08:49:28] [INFO ] Transformed 11 transitions.
[2020-05-19 08:49:28] [INFO ] Parsed PT model containing 15 places and 11 transitions in 49 ms.
Parsed 16 properties from file /home/mcc/execution/CTLFireability.xml in 11 ms.
Incomplete random walk after 100001 steps, including 0 resets, run finished after 49 ms. (steps per millisecond=2040 ) properties seen :[1, 1, 0, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1]
// Phase 1: matrix 11 rows 15 cols
[2020-05-19 08:49:28] [INFO ] Computed 6 place invariants in 3 ms
[2020-05-19 08:49:28] [INFO ] [Real]Absence check using 3 positive place invariants in 9 ms returned unsat
Successfully simplified 1 atomic propositions for a total of 1 simplifications.
[2020-05-19 08:49:29] [INFO ] Initial state reduction rules for CTL removed 1 formulas.
[2020-05-19 08:49:29] [INFO ] Flatten gal took : 18 ms
[2020-05-19 08:49:29] [INFO ] Initial state reduction rules for CTL removed 1 formulas.
[2020-05-19 08:49:29] [INFO ] Flatten gal took : 4 ms
FORMULA RobotManipulation-PT-00010-CTLFireability-02 FALSE TECHNIQUES TOPOLOGICAL INITIAL_STATE
[2020-05-19 08:49:29] [INFO ] Applying decomposition
[2020-05-19 08:49:29] [INFO ] Flatten gal took : 2 ms
Converted graph to binary with : CommandLine [args=[/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.louvain.binaries_1.0.0.202005100927/bin/convert-linux64, -i, /tmp/graph3409720686670700553.txt, -o, /tmp/graph3409720686670700553.bin, -w, /tmp/graph3409720686670700553.weights], workingDir=null]
Built communities with : CommandLine [args=[/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.louvain.binaries_1.0.0.202005100927/bin/louvain-linux64, /tmp/graph3409720686670700553.bin, -l, -1, -v, -w, /tmp/graph3409720686670700553.weights, -q, 0, -e, 0.001], workingDir=null]
[2020-05-19 08:49:29] [INFO ] Decomposing Gal with order
[2020-05-19 08:49:29] [INFO ] Rewriting arrays to variables to allow decomposition.
[2020-05-19 08:49:29] [INFO ] Flatten gal took : 26 ms
[2020-05-19 08:49:29] [INFO ] Fuse similar labels procedure discarded/fused a total of 0 labels/synchronizations in 1 ms.
[2020-05-19 08:49:29] [INFO ] Time to serialize gal into /home/mcc/execution/CTLFireability.pnml.gal : 2 ms
[2020-05-19 08:49:29] [INFO ] Time to serialize properties into /home/mcc/execution/CTLFireability.ctl : 1 ms
Invoking ITS tools like this :CommandLine [args=[/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.202005100927/bin/its-ctl-linux64, --gc-threshold, 2000000, --quiet, -i, /home/mcc/execution/CTLFireability.pnml.gal, -t, CGAL, -ctl, /home/mcc/execution/CTLFireability.ctl], workingDir=/home/mcc/execution]
its-ctl command run as :
/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.202005100927/bin/its-ctl-linux64 --gc-threshold 2000000 --quiet -i /home/mcc/execution/CTLFireability.pnml.gal -t CGAL -ctl /home/mcc/execution/CTLFireability.ctl
No direction supplied, using forward translation only.
Parsed 15 CTL formulae.
built 3 ordering constraints for composite.
built 6 ordering constraints for composite.
built 6 ordering constraints for composite.
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
reachable,2.003e+07,12.5427,101428,5119,2588,119091,100909,65,284579,21,468769,0
Converting to forward existential form...Done !
original formula: !(AG((((((i2.u1.p_rdy<1)||(i0.u3.access<1))||(i2.u1.p_rdy<1))||(i0.u3.access<1))||(i2.u4.p_i1>=1))))
=> equivalent forward existential formula: [(FwdU(Init,TRUE) * !((((((i2.u1.p_rdy<1)||(i0.u3.access<1))||(i2.u1.p_rdy<1))||(i0.u3.access<1))||(i2.u4.p_i1>=1))))] != FALSE
(forward)formula 0,1,18.4435,102188,1,0,119091,138591,80,300426,47,556156,7394
FORMULA RobotManipulation-PT-00010-CTLFireability-00 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL USE_NUPN
Formula is TRUE !
***************************************
original formula: AF(!(AF(((i2.u1.p_rdy>=1)||((i2.u1.initialized>=1)&&(i2.u4.p_i2>=1))))))
=> equivalent forward existential formula: [FwdG(Init,!(!(!(EG(!(((i2.u1.p_rdy>=1)||((i2.u1.initialized>=1)&&(i2.u4.p_i2>=1)))))))))] = FALSE
Reverse transition relation is exact ! Faster fixpoint algorithm enabled.
ITS-tools command line returned an error code 139
[2020-05-19 08:56:02] [INFO ] Flatten gal took : 2 ms
[2020-05-19 08:56:02] [INFO ] Time to serialize gal into /home/mcc/execution/CTLFireability.pnml.gal : 2 ms
[2020-05-19 08:56:02] [INFO ] Time to serialize properties into /home/mcc/execution/CTLFireability.ctl : 3 ms
Invoking ITS tools like this :CommandLine [args=[/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.202005100927/bin/its-ctl-linux64, --gc-threshold, 2000000, --quiet, -i, /home/mcc/execution/CTLFireability.pnml.gal, -t, CGAL, -ctl, /home/mcc/execution/CTLFireability.ctl, --gen-order, FOLLOW], workingDir=/home/mcc/execution]
its-ctl command run as :
/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.202005100927/bin/its-ctl-linux64 --gc-threshold 2000000 --quiet -i /home/mcc/execution/CTLFireability.pnml.gal -t CGAL -ctl /home/mcc/execution/CTLFireability.ctl --gen-order FOLLOW
No direction supplied, using forward translation only.
Parsed 14 CTL formulae.
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
reachable,2.003e+07,0.745922,28292,2,4378,5,148951,6,0,74,154896,0
Converting to forward existential form...Done !
original formula: AF(!(AF(((p_rdy>=1)||((initialized>=1)&&(p_i2>=1))))))
=> equivalent forward existential formula: [FwdG(Init,!(!(!(EG(!(((p_rdy>=1)||((initialized>=1)&&(p_i2>=1)))))))))] = FALSE
Reverse transition relation is exact ! Faster fixpoint algorithm enabled.
(forward)formula 0,0,4.97529,131360,1,0,6,809381,21,1,643,750261,8
FORMULA RobotManipulation-PT-00010-CTLFireability-01 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is FALSE !
***************************************
original formula: AF(((p_rdy>=1)&&(access>=1)))
=> equivalent forward existential formula: [FwdG(Init,!(((p_rdy>=1)&&(access>=1))))] = FALSE
Hit Full ! (commute/partial/dont) 7/0/4
(forward)formula 1,1,5.02017,133208,1,0,8,817941,29,2,669,757168,12
FORMULA RobotManipulation-PT-00010-CTLFireability-03 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: AX(((AX((p_rel>=1)) + (((p_rdy>=1)&&(access>=1))&&((off<1)||(r_active<1)))) + (AF((p_rdy>=1)) * AX((p_i1>=1)))))
=> equivalent forward existential formula: ([FwdG((EY(Init) * !((!(EX(!((p_rel>=1)))) + (((p_rdy>=1)&&(access>=1))&&((off<1)||(r_active<1)))))),!((p_rdy>=1)))] = FALSE * [(EY((EY(Init) * !((!(EX(!((p_rel>=1)))) + (((p_rdy>=1)&&(access>=1))&&((off<1)||(r_active<1))))))) * !((p_i1>=1)))] = FALSE)
Hit Full ! (commute/partial/dont) 7/0/4
(forward)formula 2,1,5.40019,137696,1,0,20,844418,42,9,691,793233,22
FORMULA RobotManipulation-PT-00010-CTLFireability-04 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: EF((p_i1<1))
=> equivalent forward existential formula: [(FwdU(Init,TRUE) * (p_i1<1))] != FALSE
(forward)formula 3,1,5.41453,137960,1,0,20,844418,42,10,691,797325,23
FORMULA RobotManipulation-PT-00010-CTLFireability-05 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: A(EG((p_rel<1)) U A(((off>=1)&&(r_active>=1)) U ((p_rdy>=1)&&(access>=1))))
=> equivalent forward existential formula: [((Init * !(EG(!(!((E(!(((p_rdy>=1)&&(access>=1))) U (!(((off>=1)&&(r_active>=1))) * !(((p_rdy>=1)&&(access>=1))))) + EG(!(((p_rdy>=1)&&(access>=1)))))))))) * !(E(!(!((E(!(((p_rdy>=1)&&(access>=1))) U (!(((off>=1)&&(r_active>=1))) * !(((p_rdy>=1)&&(access>=1))))) + EG(!(((p_rdy>=1)&&(access>=1))))))) U (!(EG((p_rel<1))) * !(!((E(!(((p_rdy>=1)&&(access>=1))) U (!(((off>=1)&&(r_active>=1))) * !(((p_rdy>=1)&&(access>=1))))) + EG(!(((p_rdy>=1)&&(access>=1)))))))))))] != FALSE
Hit Full ! (commute/partial/dont) 7/0/4
Using saturation style SCC detection
(forward)formula 4,1,14.109,335720,1,0,38,2.05478e+06,64,24,741,2.05065e+06,38
FORMULA RobotManipulation-PT-00010-CTLFireability-06 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: (AX((p_rel>=1)) + (AF(((p_rdy>=1)&&(access>=1))) * !(AG(((move<1)||(r_active<1))))))
=> equivalent forward existential formula: ([FwdG((Init * !(!(EX(!((p_rel>=1)))))),!(((p_rdy>=1)&&(access>=1))))] = FALSE * [((Init * !(!(EX(!((p_rel>=1)))))) * !(E(TRUE U !(((move<1)||(r_active<1))))))] = FALSE)
(forward)formula 5,1,14.1735,337568,1,0,39,2.05975e+06,70,25,760,2.05659e+06,41
FORMULA RobotManipulation-PT-00010-CTLFireability-07 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: ((A((p_rdy>=1) U ((off<1)||(r_active<1))) * AG((p_i1>=1))) * E(((off>=1)&&(r_active>=1)) U (p_i1>=1)))
=> equivalent forward existential formula: ((([(FwdU(Init,!(((off<1)||(r_active<1)))) * (!((p_rdy>=1)) * !(((off<1)||(r_active<1)))))] = FALSE * [FwdG(Init,!(((off<1)||(r_active<1))))] = FALSE) * [(FwdU(Init,TRUE) * !((p_i1>=1)))] = FALSE) * [(Init * !(E(((off>=1)&&(r_active>=1)) U (p_i1>=1))))] = FALSE)
Hit Full ! (commute/partial/dont) 6/4/5
(forward)formula 6,0,14.3692,343376,1,0,42,2.09461e+06,76,27,785,2.09581e+06,44
FORMULA RobotManipulation-PT-00010-CTLFireability-08 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is FALSE !
***************************************
original formula: EF((AG(((p_rel>=1)||((move>=1)&&(r_active>=1)))) * !(AF(((initialized>=1)&&(p_i2>=1))))))
=> equivalent forward existential formula: [FwdG((FwdU(Init,TRUE) * !(E(TRUE U !(((p_rel>=1)||((move>=1)&&(r_active>=1))))))),!(((initialized>=1)&&(p_i2>=1))))] != FALSE
(forward)formula 7,0,14.6718,351528,1,0,44,2.14226e+06,85,27,789,2.13643e+06,48
FORMULA RobotManipulation-PT-00010-CTLFireability-09 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is FALSE !
***************************************
original formula: AX(AF(((p_rdy>=1)||((((moved>=1)&&(p_m>=1))&&(initialize>=1))&&(r_stopped>=1)))))
=> equivalent forward existential formula: [FwdG(EY(Init),!(((p_rdy>=1)||((((moved>=1)&&(p_m>=1))&&(initialize>=1))&&(r_stopped>=1)))))] = FALSE
Hit Full ! (commute/partial/dont) 1/5/10
(forward)formula 8,1,14.7233,353640,1,0,45,2.14741e+06,93,28,825,2.14597e+06,51
FORMULA RobotManipulation-PT-00010-CTLFireability-10 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: (AF((((((((move>=1)&&(r_active>=1))||(p_i1>=1))&&(p_rdy>=1))&&(p_i1>=1))&&(p_rdy>=1))&&(access>=1))) + EG(EX(((r_moving>=1)||((moved>=1)&&(p_m>=1))))))
=> equivalent forward existential formula: [FwdG((Init * !(EG(EX(((r_moving>=1)||((moved>=1)&&(p_m>=1))))))),!((((((((move>=1)&&(r_active>=1))||(p_i1>=1))&&(p_rdy>=1))&&(p_i1>=1))&&(p_rdy>=1))&&(access>=1))))] = FALSE
Using saturation style SCC detection
Hit Full ! (commute/partial/dont) 1/0/10
(forward)formula 9,0,25.7699,588984,1,0,52,3.5506e+06,105,31,847,3.60615e+06,58
FORMULA RobotManipulation-PT-00010-CTLFireability-11 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is FALSE !
***************************************
original formula: AG(E((((move>=1)&&(r_active>=1))||((p_rdy>=1)&&(access>=1))) U ((move<1)||(r_active<1))))
=> equivalent forward existential formula: [(FwdU(Init,TRUE) * !(E((((move>=1)&&(r_active>=1))||((p_rdy>=1)&&(access>=1))) U ((move<1)||(r_active<1)))))] = FALSE
Hit Full ! (commute/partial/dont) 2/0/9
(forward)formula 10,1,26.1908,601392,1,0,54,3.62783e+06,112,31,864,3.67394e+06,62
FORMULA RobotManipulation-PT-00010-CTLFireability-12 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: AG(EF((((initialized>=1)&&(p_i2>=1))&&(((moved>=1)&&(p_m>=1))||((initialize>=1)&&(r_stopped>=1))))))
=> equivalent forward existential formula: [(FwdU(Init,TRUE) * !(E(TRUE U (((initialized>=1)&&(p_i2>=1))&&(((moved>=1)&&(p_m>=1))||((initialize>=1)&&(r_stopped>=1)))))))] = FALSE
(forward)formula 11,1,26.3457,605352,1,0,55,3.65196e+06,113,31,867,3.69943e+06,65
FORMULA RobotManipulation-PT-00010-CTLFireability-13 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: AG(EF((((off>=1)&&(r_active>=1))&&((p_sc>=1)||((initialized>=1)&&(p_i2>=1))))))
=> equivalent forward existential formula: [(FwdU(Init,TRUE) * !(E(TRUE U (((off>=1)&&(r_active>=1))&&((p_sc>=1)||((initialized>=1)&&(p_i2>=1)))))))] = FALSE
(forward)formula 12,1,26.4287,607464,1,0,56,3.66378e+06,114,31,870,3.70976e+06,68
FORMULA RobotManipulation-PT-00010-CTLFireability-14 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: EG(((p_rdy<1)||(access<1)))
=> equivalent forward existential formula: [FwdG(Init,((p_rdy<1)||(access<1)))] != FALSE
(forward)formula 13,0,26.4291,607728,1,0,56,3.66378e+06,114,31,870,3.70976e+06,68
FORMULA RobotManipulation-PT-00010-CTLFireability-15 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is FALSE !
***************************************
BK_STOP 1589878589171
--------------------
content from stderr:
+ export BINDIR=/home/mcc/BenchKit/
+ BINDIR=/home/mcc/BenchKit/
++ pwd
+ export MODEL=/home/mcc/execution
+ MODEL=/home/mcc/execution
+ [[ CTLFireability = StateSpace ]]
+ /home/mcc/BenchKit//runeclipse.sh /home/mcc/execution CTLFireability -its -ltsminpath /home/mcc/BenchKit//lts_install_dir/ -greatspnpath /home/mcc/BenchKit//greatspn/ -order META -manyOrder -smt -timeout 3600
+ ulimit -s 65536
+ [[ -z '' ]]
+ export LTSMIN_MEM_SIZE=8589934592
+ LTSMIN_MEM_SIZE=8589934592
+ /home/mcc/BenchKit//itstools/its-tools -data /home/mcc/execution/workspace -pnfolder /home/mcc/execution -examination CTLFireability -z3path /home/mcc/BenchKit//z3/bin/z3 -yices2path /home/mcc/BenchKit//yices/bin/yices -its -ltsminpath /home/mcc/BenchKit//lts_install_dir/ -greatspnpath /home/mcc/BenchKit//greatspn/ -order META -manyOrder -smt -timeout 3600 -vmargs -Dosgi.locking=none -Declipse.stateSaveDelayInterval=-1 -Dosgi.configuration.area=/tmp/.eclipse -Xss128m -Xms40m -Xmx16000m -Dfile.encoding=UTF-8 -Dosgi.requiredJavaVersion=1.6
Sequence of Actions to be Executed by the VM
This is useful if one wants to reexecute the tool in the VM from the submitted image disk.
set -x
# this is for BenchKit: configuration of major elements for the test
export BK_INPUT="RobotManipulation-PT-00010"
export BK_EXAMINATION="CTLFireability"
export BK_TOOL="itstools"
export BK_RESULT_DIR="/tmp/BK_RESULTS/OUTPUTS"
export BK_TIME_CONFINEMENT="3600"
export BK_MEMORY_CONFINEMENT="16384"
# this is specific to your benchmark or test
export BIN_DIR="$HOME/BenchKit/bin"
# remove the execution directoty if it exists (to avoid increse of .vmdk images)
if [ -d execution ] ; then
rm -rf execution
fi
# this is for BenchKit: explicit launching of the test
echo "====================================================================="
echo " Generated by BenchKit 2-4028"
echo " Executing tool itstools"
echo " Input is RobotManipulation-PT-00010, examination is CTLFireability"
echo " Time confinement is $BK_TIME_CONFINEMENT seconds"
echo " Memory confinement is 16384 MBytes"
echo " Number of cores is 4"
echo " Run identifier is r156-oct2-158972913700164"
echo "====================================================================="
echo
echo "--------------------"
echo "preparation of the directory to be used:"
tar xzf /home/mcc/BenchKit/INPUTS/RobotManipulation-PT-00010.tgz
mv RobotManipulation-PT-00010 execution
cd execution
if [ "CTLFireability" = "ReachabilityDeadlock" ] || [ "CTLFireability" = "UpperBounds" ] || [ "CTLFireability" = "QuasiLiveness" ] || [ "CTLFireability" = "StableMarking" ] || [ "CTLFireability" = "Liveness" ] || [ "CTLFireability" = "OneSafe" ] || [ "CTLFireability" = "StateSpace" ]; then
rm -f GenericPropertiesVerdict.xml
fi
pwd
ls -lh
echo
echo "--------------------"
echo "content from stdout:"
echo
echo "=== Data for post analysis generated by BenchKit (invocation template)"
echo
if [ "CTLFireability" = "UpperBounds" ] ; then
echo "The expected result is a vector of positive values"
echo NUM_VECTOR
elif [ "CTLFireability" != "StateSpace" ] ; then
echo "The expected result is a vector of booleans"
echo BOOL_VECTOR
else
echo "no data necessary for post analysis"
fi
echo
if [ -f "CTLFireability.txt" ] ; then
echo "here is the order used to build the result vector(from text file)"
for x in $(grep Property CTLFireability.txt | cut -d ' ' -f 2 | sort -u) ; do
echo "FORMULA_NAME $x"
done
elif [ -f "CTLFireability.xml" ] ; then # for cunf (txt files deleted;-)
echo echo "here is the order used to build the result vector(from xml file)"
for x in $(grep '
echo "FORMULA_NAME $x"
done
elif [ "CTLFireability" = "ReachabilityDeadlock" ] || [ "CTLFireability" = "QuasiLiveness" ] || [ "CTLFireability" = "StableMarking" ] || [ "CTLFireability" = "Liveness" ] || [ "CTLFireability" = "OneSafe" ] ; then
echo "FORMULA_NAME CTLFireability"
fi
echo
echo "=== Now, execution of the tool begins"
echo
echo -n "BK_START "
date -u +%s%3N
echo
timeout -s 9 $BK_TIME_CONFINEMENT bash -c "/home/mcc/BenchKit/BenchKit_head.sh 2> STDERR ; echo ; echo -n \"BK_STOP \" ; date -u +%s%3N"
if [ $? -eq 137 ] ; then
echo
echo "BK_TIME_CONFINEMENT_REACHED"
fi
echo
echo "--------------------"
echo "content from stderr:"
echo
cat STDERR ;