
About the Execution of ITS-Tools for RobotManipulation-PT-00001
| Execution Summary | |||||
| Max Memory Used (MB) |
Time wait (ms) | CPU Usage (ms) | I/O Wait (ms) | Computed Result | Execution Status |
| 15729.370 | 2365.00 | 6059.00 | 59.70 | FFTFFFFTFFFFFFTF | normal |
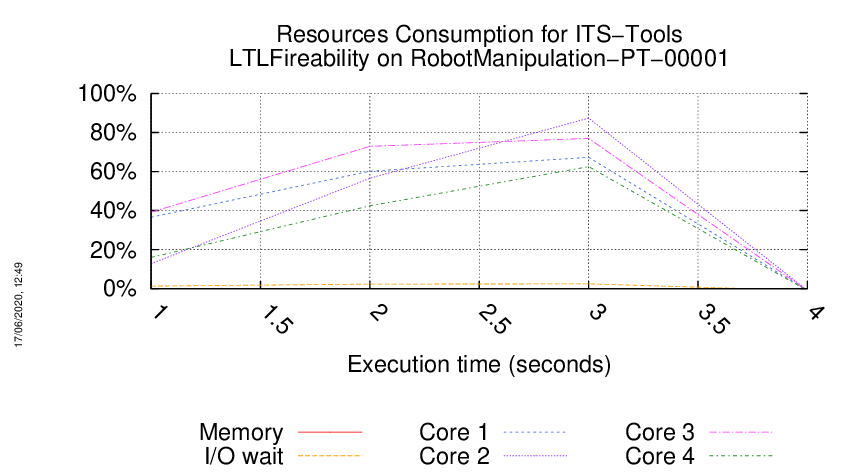
Execution Chart
We display below the execution chart for this examination (boot time has been removed).
Trace from the execution
Formatting '/data/fko/mcc2020-input.r156-oct2-158972913700138.qcow2', fmt=qcow2 size=4294967296 backing_file=/data/fko/mcc2020-input.qcow2 cluster_size=65536 lazy_refcounts=off refcount_bits=16
Waiting for the VM to be ready (probing ssh)
.............................................................................................................................................................................................................
=====================================================================
Generated by BenchKit 2-4028
Executing tool itstools
Input is RobotManipulation-PT-00001, examination is LTLFireability
Time confinement is 3600 seconds
Memory confinement is 16384 MBytes
Number of cores is 4
Run identifier is r156-oct2-158972913700138
=====================================================================
--------------------
preparation of the directory to be used:
/home/mcc/execution
total 184K
-rw-r--r-- 1 mcc users 4.2K Apr 12 10:56 CTLCardinality.txt
-rw-r--r-- 1 mcc users 21K Apr 12 10:56 CTLCardinality.xml
-rw-r--r-- 1 mcc users 2.8K Apr 11 12:03 CTLFireability.txt
-rw-r--r-- 1 mcc users 16K Apr 11 12:03 CTLFireability.xml
-rw-r--r-- 1 mcc users 4.0K Mar 24 05:38 GenericPropertiesDefinition.xml
-rw-r--r-- 1 mcc users 6.2K Mar 24 05:38 GenericPropertiesVerdict.xml
-rw-r--r-- 1 mcc users 3.5K Apr 14 12:49 LTLCardinality.txt
-rw-r--r-- 1 mcc users 22K Apr 28 14:02 LTLCardinality.xml
-rw-r--r-- 1 mcc users 2.2K Apr 14 12:49 LTLFireability.txt
-rw-r--r-- 1 mcc users 15K Apr 28 14:02 LTLFireability.xml
-rw-r--r-- 1 mcc users 3.5K Apr 10 16:33 ReachabilityCardinality.txt
-rw-r--r-- 1 mcc users 17K Apr 10 16:33 ReachabilityCardinality.xml
-rw-r--r-- 1 mcc users 2.8K Apr 9 22:57 ReachabilityFireability.txt
-rw-r--r-- 1 mcc users 14K Apr 9 22:57 ReachabilityFireability.xml
-rw-r--r-- 1 mcc users 1.8K Apr 10 22:28 UpperBounds.txt
-rw-r--r-- 1 mcc users 3.8K Apr 10 22:28 UpperBounds.xml
-rw-r--r-- 1 mcc users 6 Mar 24 05:38 equiv_col
-rw-r--r-- 1 mcc users 6 Mar 24 05:38 instance
-rw-r--r-- 1 mcc users 6 Mar 24 05:38 iscolored
-rw-r--r-- 1 mcc users 6.4K Mar 24 05:38 model.pnml
--------------------
content from stdout:
=== Data for post analysis generated by BenchKit (invocation template)
The expected result is a vector of booleans
BOOL_VECTOR
here is the order used to build the result vector(from text file)
FORMULA_NAME RobotManipulation-PT-00001-00
FORMULA_NAME RobotManipulation-PT-00001-01
FORMULA_NAME RobotManipulation-PT-00001-02
FORMULA_NAME RobotManipulation-PT-00001-03
FORMULA_NAME RobotManipulation-PT-00001-04
FORMULA_NAME RobotManipulation-PT-00001-05
FORMULA_NAME RobotManipulation-PT-00001-06
FORMULA_NAME RobotManipulation-PT-00001-07
FORMULA_NAME RobotManipulation-PT-00001-08
FORMULA_NAME RobotManipulation-PT-00001-09
FORMULA_NAME RobotManipulation-PT-00001-10
FORMULA_NAME RobotManipulation-PT-00001-11
FORMULA_NAME RobotManipulation-PT-00001-12
FORMULA_NAME RobotManipulation-PT-00001-13
FORMULA_NAME RobotManipulation-PT-00001-14
FORMULA_NAME RobotManipulation-PT-00001-15
=== Now, execution of the tool begins
BK_START 1589878030351
[2020-05-19 08:47:11] [INFO ] Running its-tools with arguments : [-pnfolder, /home/mcc/execution, -examination, LTLFireability, -z3path, /home/mcc/BenchKit//z3/bin/z3, -yices2path, /home/mcc/BenchKit//yices/bin/yices, -its, -ltsminpath, /home/mcc/BenchKit//lts_install_dir/, -greatspnpath, /home/mcc/BenchKit//greatspn/, -order, META, -manyOrder, -smt, -timeout, 3600]
[2020-05-19 08:47:11] [INFO ] Parsing pnml file : /home/mcc/execution/model.pnml
[2020-05-19 08:47:11] [INFO ] Load time of PNML (sax parser for PT used): 19 ms
[2020-05-19 08:47:11] [INFO ] Transformed 15 places.
[2020-05-19 08:47:11] [INFO ] Transformed 11 transitions.
[2020-05-19 08:47:11] [INFO ] Parsed PT model containing 15 places and 11 transitions in 51 ms.
Parsed 16 properties from file /home/mcc/execution/LTLFireability.xml in 11 ms.
Working with output stream class java.io.PrintStream
Incomplete random walk after 100001 steps, including 0 resets, run finished after 97 ms. (steps per millisecond=1030 ) properties seen :[1, 1, 1, 1, 1, 0, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1]
// Phase 1: matrix 11 rows 15 cols
[2020-05-19 08:47:11] [INFO ] Computed 6 place invariants in 3 ms
[2020-05-19 08:47:12] [INFO ] [Real]Absence check using 3 positive place invariants in 12 ms returned unsat
Successfully simplified 1 atomic propositions for a total of 1 simplifications.
[2020-05-19 08:47:12] [INFO ] Initial state reduction rules for CTL removed 2 formulas.
[2020-05-19 08:47:12] [INFO ] Flatten gal took : 26 ms
FORMULA RobotManipulation-PT-00001-07 TRUE TECHNIQUES TOPOLOGICAL INITIAL_STATE
FORMULA RobotManipulation-PT-00001-01 FALSE TECHNIQUES TOPOLOGICAL INITIAL_STATE
[2020-05-19 08:47:12] [INFO ] Flatten gal took : 3 ms
Using solver Z3 to compute partial order matrices.
Built C files in :
/home/mcc/execution
[2020-05-19 08:47:12] [INFO ] Applying decomposition
[2020-05-19 08:47:12] [INFO ] Flatten gal took : 2 ms
[2020-05-19 08:47:12] [INFO ] Input system was already deterministic with 11 transitions.
Presburger conditions satisfied. Using coverability to approximate state space in K-Induction.
// Phase 1: matrix 11 rows 15 cols
Converted graph to binary with : CommandLine [args=[/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.louvain.binaries_1.0.0.202005100927/bin/convert-linux64, -i, /tmp/graph1649621901614763947.txt, -o, /tmp/graph1649621901614763947.bin, -w, /tmp/graph1649621901614763947.weights], workingDir=null]
[2020-05-19 08:47:12] [INFO ] Computed 6 place invariants in 1 ms
inv : p_rdy + p_sc + p_m + p_rel + p_i1 + p_i2 = 3
inv : move + moved + r_moving + p_rdy + p_sc + p_rel + p_i1 + p_i2 = 3
inv : initialize + initialized - p_i2 = 0
inv : r_stopped + r_active + r_moving = 2
inv : off + r_stopped - p_i1 + initialized - p_i2 = -1
inv : -p_rdy + access - p_i1 - p_i2 = -1
Total of 6 invariants.
[2020-05-19 08:47:12] [INFO ] Computed 6 place invariants in 3 ms
Built communities with : CommandLine [args=[/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.louvain.binaries_1.0.0.202005100927/bin/louvain-linux64, /tmp/graph1649621901614763947.bin, -l, -1, -v, -w, /tmp/graph1649621901614763947.weights, -q, 0, -e, 0.001], workingDir=null]
[2020-05-19 08:47:12] [INFO ] Decomposing Gal with order
[2020-05-19 08:47:12] [INFO ] Rewriting arrays to variables to allow decomposition.
[2020-05-19 08:47:12] [INFO ] Flatten gal took : 34 ms
[2020-05-19 08:47:12] [INFO ] Fuse similar labels procedure discarded/fused a total of 0 labels/synchronizations in 0 ms.
[2020-05-19 08:47:12] [INFO ] Time to serialize gal into /home/mcc/execution/LTLFireability.pnml.gal : 1 ms
[2020-05-19 08:47:12] [INFO ] Time to serialize properties into /home/mcc/execution/LTLFireability.ltl : 1 ms
[2020-05-19 08:47:12] [INFO ] Proved 15 variables to be positive in 92 ms
Invoking ITS tools like this :CommandLine [args=[/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.202005100927/bin/its-ltl-linux64, --gc-threshold, 2000000, -i, /home/mcc/execution/LTLFireability.pnml.gal, -t, CGAL, -LTL, /home/mcc/execution/LTLFireability.ltl, -c, -stutter-deadlock], workingDir=/home/mcc/execution]
[2020-05-19 08:47:12] [INFO ] Computing symmetric may disable matrix : 11 transitions.
[2020-05-19 08:47:12] [INFO ] Computation of disable matrix completed :0/11 took 0 ms. Total solver calls (SAT/UNSAT): 0(0/0)
[2020-05-19 08:47:12] [INFO ] Computation of Complete disable matrix. took 1 ms. Total solver calls (SAT/UNSAT): 0(0/0)
[2020-05-19 08:47:12] [INFO ] Computing symmetric may enable matrix : 11 transitions.
[2020-05-19 08:47:12] [INFO ] Computation of Complete enable matrix. took 0 ms. Total solver calls (SAT/UNSAT): 0(0/0)
its-ltl command run as :
/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.202005100927/bin/its-ltl-linux64 --gc-threshold 2000000 -i /home/mcc/execution/LTLFireability.pnml.gal -t CGAL -LTL /home/mcc/execution/LTLFireability.ltl -c -stutter-deadlock
Read 14 LTL properties
Checking formula 0 : !((G(X(G("((u3.initialized>=1)&&(u3.p_i2>=1))")))))
Formula 0 simplified : !GXG"((u3.initialized>=1)&&(u3.p_i2>=1))"
built 3 ordering constraints for composite.
built 6 ordering constraints for composite.
Reverse transition relation is exact ! Faster fixpoint algorithm enabled.
4 unique states visited
4 strongly connected components in search stack
4 transitions explored
4 items max in DFS search stack
1 ticks for the emptiness check
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
STATS,0,0.024607,16620,1,0,557,554,198,790,165,1350,1098
an accepting run exists (use option '-e' to print it)
Formula 0 is FALSE accepting run found.
FORMULA RobotManipulation-PT-00001-00 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL USE_NUPN
Checking formula 1 : !((X(!(X((G("((i0.u1.moved>=1)&&(i0.u1.p_m>=1))"))U("((u3.p_rdy>=1)&&(i0.u0.access>=1))"))))))
Formula 1 simplified : !X!X(G"((i0.u1.moved>=1)&&(i0.u1.p_m>=1))" U "((u3.p_rdy>=1)&&(i0.u0.access>=1))")
3 unique states visited
0 strongly connected components in search stack
2 transitions explored
3 items max in DFS search stack
0 ticks for the emptiness check
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
STATS,0,0.026336,17292,1,0,557,554,225,790,169,1350,1112
no accepting run found
Formula 1 is TRUE no accepting run found.
FORMULA RobotManipulation-PT-00001-02 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL USE_NUPN
Checking formula 2 : !((F(G(X((G("((i0.u0.move>=1)&&(u2.r_active>=1))"))||(G(X("((u2.off>=1)&&(u2.r_active>=1))"))))))))
Formula 2 simplified : !FGX(G"((i0.u0.move>=1)&&(u2.r_active>=1))" | GX"((u2.off>=1)&&(u2.r_active>=1))")
5 unique states visited
3 strongly connected components in search stack
9 transitions explored
5 items max in DFS search stack
1 ticks for the emptiness check
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
STATS,0,0.034835,19208,1,0,951,579,284,1389,175,1698,2111
an accepting run exists (use option '-e' to print it)
Formula 2 is FALSE accepting run found.
FORMULA RobotManipulation-PT-00001-03 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL USE_NUPN
Checking formula 3 : !((!(X(X(G(!(G(X(G(F((F("(u2.r_moving>=1)"))&&("(u2.r_moving>=1)"))))))))))))
Formula 3 simplified : XXG!GXGF("(u2.r_moving>=1)" & F"(u2.r_moving>=1)")
3 unique states visited
3 strongly connected components in search stack
4 transitions explored
3 items max in DFS search stack
0 ticks for the emptiness check
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
STATS,0,0.037357,19208,1,0,1075,590,298,1606,175,1803,2380
an accepting run exists (use option '-e' to print it)
Formula 3 is FALSE accepting run found.
FORMULA RobotManipulation-PT-00001-04 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL USE_NUPN
Checking formula 4 : !((!(X(!(F((F("((i0.u1.moved>=1)&&(i0.u1.p_m>=1))"))||("((i0.u1.moved>=1)&&(i0.u1.p_m>=1))")))))))
Formula 4 simplified : X!F("((i0.u1.moved>=1)&&(i0.u1.p_m>=1))" | F"((i0.u1.moved>=1)&&(i0.u1.p_m>=1))")
3 unique states visited
3 strongly connected components in search stack
3 transitions explored
3 items max in DFS search stack
0 ticks for the emptiness check
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
STATS,0,0.039376,19208,1,0,1221,597,316,1797,175,1850,2742
an accepting run exists (use option '-e' to print it)
Formula 4 is FALSE accepting run found.
FORMULA RobotManipulation-PT-00001-05 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL USE_NUPN
Checking formula 5 : !(((F(G((X("(((u2.off>=1)&&(u2.r_active>=1))||((u3.p_rdy>=1)&&(i0.u0.access>=1)))"))U("((i0.u1.moved>=1)&&(i0.u1.p_m>=1))"))))U(F("((i0.u1.moved>=1)&&(i0.u1.p_m>=1))"))))
Formula 5 simplified : !(FG(X"(((u2.off>=1)&&(u2.r_active>=1))||((u3.p_rdy>=1)&&(i0.u0.access>=1)))" U "((i0.u1.moved>=1)&&(i0.u1.p_m>=1))") U F"((i0.u1.moved>=1)&&(i0.u1.p_m>=1))")
2 unique states visited
2 strongly connected components in search stack
2 transitions explored
2 items max in DFS search stack
0 ticks for the emptiness check
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
STATS,0,0.040292,19208,1,0,1221,597,316,1801,175,1858,2752
an accepting run exists (use option '-e' to print it)
Formula 5 is FALSE accepting run found.
FORMULA RobotManipulation-PT-00001-06 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL USE_NUPN
Checking formula 6 : !(((G(!(X((G("(i0.u1.p_rel>=1)"))&&("(i0.u0.p_sc>=1)")))))&&(!(G("(((u3.p_rdy>=1)&&(i0.u0.access>=1))||(i0.u1.p_rel>=1))")))))
Formula 6 simplified : !(G!X("(i0.u0.p_sc>=1)" & G"(i0.u1.p_rel>=1)") & !G"(((u3.p_rdy>=1)&&(i0.u0.access>=1))||(i0.u1.p_rel>=1))")
4 unique states visited
4 strongly connected components in search stack
5 transitions explored
4 items max in DFS search stack
0 ticks for the emptiness check
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
STATS,0,0.042483,19208,1,0,1371,599,344,1958,175,1880,3196
an accepting run exists (use option '-e' to print it)
Formula 6 is FALSE accepting run found.
FORMULA RobotManipulation-PT-00001-08 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL USE_NUPN
Checking formula 7 : !((F(X(X(F((F("((u3.initialize>=1)&&(u2.r_stopped>=1))"))U(X("((u3.initialize>=1)&&(u2.r_stopped>=1))"))))))))
Formula 7 simplified : !FXXF(F"((u3.initialize>=1)&&(u2.r_stopped>=1))" U X"((u3.initialize>=1)&&(u2.r_stopped>=1))")
5 unique states visited
5 strongly connected components in search stack
5 transitions explored
5 items max in DFS search stack
1 ticks for the emptiness check
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
STATS,0,0.044461,19208,1,0,1471,627,362,2137,175,2045,3476
an accepting run exists (use option '-e' to print it)
Formula 7 is FALSE accepting run found.
FORMULA RobotManipulation-PT-00001-09 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL USE_NUPN
Checking formula 8 : !((F((G("(((u3.p_rdy>=1)&&(i0.u0.access>=1))||(u3.p_i1>=1))"))&&(!(X((F("((i0.u1.moved>=1)&&(i0.u1.p_m>=1))"))&&("(i0.u1.p_rel>=1)")))))))
Formula 8 simplified : !F(G"(((u3.p_rdy>=1)&&(i0.u0.access>=1))||(u3.p_i1>=1))" & !X("(i0.u1.p_rel>=1)" & F"((i0.u1.moved>=1)&&(i0.u1.p_m>=1))"))
13 unique states visited
10 strongly connected components in search stack
13 transitions explored
12 items max in DFS search stack
1 ticks for the emptiness check
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
STATS,0,0.062004,20156,1,0,2997,759,429,5021,179,4142,6414
an accepting run exists (use option '-e' to print it)
Formula 8 is FALSE accepting run found.
FORMULA RobotManipulation-PT-00001-10 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL USE_NUPN
Checking formula 9 : !(((X(X("(u3.p_i1>=1)")))U(G("(u3.p_i1>=1)"))))
Formula 9 simplified : !(XX"(u3.p_i1>=1)" U G"(u3.p_i1>=1)")
5 unique states visited
5 strongly connected components in search stack
5 transitions explored
5 items max in DFS search stack
1 ticks for the emptiness check
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
STATS,0,0.065744,20420,1,0,3159,769,440,5431,179,4523,6747
an accepting run exists (use option '-e' to print it)
Formula 9 is FALSE accepting run found.
FORMULA RobotManipulation-PT-00001-11 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL USE_NUPN
Checking formula 10 : !((((G("((u2.off>=1)&&(u2.r_active>=1))"))U((!(X("((u2.off>=1)&&(u2.r_active>=1))")))&&(!(G(X("((u3.initialize>=1)&&(u2.r_stopped>=1))"))))))||(G("(u2.r_moving>=1)"))))
Formula 10 simplified : !((G"((u2.off>=1)&&(u2.r_active>=1))" U (!X"((u2.off>=1)&&(u2.r_active>=1))" & !GX"((u3.initialize>=1)&&(u2.r_stopped>=1))")) | G"(u2.r_moving>=1)")
4 unique states visited
4 strongly connected components in search stack
4 transitions explored
4 items max in DFS search stack
0 ticks for the emptiness check
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
STATS,0,0.070039,20420,1,0,3270,772,464,5623,181,4675,7020
an accepting run exists (use option '-e' to print it)
Formula 10 is FALSE accepting run found.
FORMULA RobotManipulation-PT-00001-12 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL USE_NUPN
Checking formula 11 : !((G(X(X(G("(i0.u1.p_rel>=1)"))))))
Formula 11 simplified : !GXXG"(i0.u1.p_rel>=1)"
5 unique states visited
5 strongly connected components in search stack
5 transitions explored
5 items max in DFS search stack
0 ticks for the emptiness check
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
STATS,0,0.071237,20420,1,0,3280,773,465,5649,181,4704,7077
an accepting run exists (use option '-e' to print it)
Formula 11 is FALSE accepting run found.
FORMULA RobotManipulation-PT-00001-13 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL USE_NUPN
Checking formula 12 : !((F((F(G("((u3.initialized>=1)&&(u3.p_i2>=1))")))U(G(F(G((F("((u3.p_rdy>=1)&&(i0.u0.access>=1))"))U(X(X("(u3.p_rdy>=1)"))))))))))
Formula 12 simplified : !F(FG"((u3.initialized>=1)&&(u3.p_i2>=1))" U GFG(F"((u3.p_rdy>=1)&&(i0.u0.access>=1))" U XX"(u3.p_rdy>=1)"))
49 unique states visited
0 strongly connected components in search stack
75 transitions explored
13 items max in DFS search stack
1 ticks for the emptiness check
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
STATS,0,0.077849,20652,1,0,3456,798,499,6165,182,5121,7742
no accepting run found
Formula 12 is TRUE no accepting run found.
FORMULA RobotManipulation-PT-00001-14 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL USE_NUPN
Checking formula 13 : !((F((X(G((F("((i0.u1.moved>=1)&&(i0.u1.p_m>=1))"))U(X("(i0.u0.p_sc>=1)")))))||(!(F(G(X("((u2.off>=1)&&(u2.r_active>=1))"))))))))
Formula 13 simplified : !F(XG(F"((i0.u1.moved>=1)&&(i0.u1.p_m>=1))" U X"(i0.u0.p_sc>=1)") | !FGX"((u2.off>=1)&&(u2.r_active>=1))")
7 unique states visited
7 strongly connected components in search stack
8 transitions explored
7 items max in DFS search stack
0 ticks for the emptiness check
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
STATS,0,0.081168,20652,1,0,3582,799,531,6350,182,5168,8131
an accepting run exists (use option '-e' to print it)
Formula 13 is FALSE accepting run found.
FORMULA RobotManipulation-PT-00001-15 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL USE_NUPN
Skipping mayMatrices nes/nds SMT solver raised an error :unknown
java.lang.RuntimeException: SMT solver raised an error :unknown
at fr.lip6.move.gal.gal2smt.bmc.NecessaryEnablingsolver.computeAblingForPredicate(NecessaryEnablingsolver.java:768)
at fr.lip6.move.gal.gal2pins.Gal2PinsTransformerNext.printLabels(Gal2PinsTransformerNext.java:502)
at fr.lip6.move.gal.gal2pins.Gal2PinsTransformerNext.printDependencyMatrix(Gal2PinsTransformerNext.java:209)
at fr.lip6.move.gal.gal2pins.Gal2PinsTransformerNext.buildBodyFile(Gal2PinsTransformerNext.java:85)
at fr.lip6.move.gal.gal2pins.Gal2PinsTransformerNext.transform(Gal2PinsTransformerNext.java:831)
at fr.lip6.move.gal.application.LTSminRunner$1.run(LTSminRunner.java:73)
at java.base/java.lang.Thread.run(Thread.java:834)
[2020-05-19 08:47:12] [INFO ] Built C files in 253ms conformant to PINS in folder :/home/mcc/execution
Running compilation step : CommandLine [args=[gcc, -c, -I/home/mcc/BenchKit//lts_install_dir//include, -I., -std=c99, -fPIC, -O2, model.c], workingDir=/home/mcc/execution]
WARNING : LTS min runner thread was asked to interrupt. Dying gracefully.
BK_STOP 1589878032716
--------------------
content from stderr:
+ export BINDIR=/home/mcc/BenchKit/
+ BINDIR=/home/mcc/BenchKit/
++ pwd
+ export MODEL=/home/mcc/execution
+ MODEL=/home/mcc/execution
+ [[ LTLFireability = StateSpace ]]
+ /home/mcc/BenchKit//runeclipse.sh /home/mcc/execution LTLFireability -its -ltsminpath /home/mcc/BenchKit//lts_install_dir/ -greatspnpath /home/mcc/BenchKit//greatspn/ -order META -manyOrder -smt -timeout 3600
+ ulimit -s 65536
+ [[ -z '' ]]
+ export LTSMIN_MEM_SIZE=8589934592
+ LTSMIN_MEM_SIZE=8589934592
+ /home/mcc/BenchKit//itstools/its-tools -data /home/mcc/execution/workspace -pnfolder /home/mcc/execution -examination LTLFireability -z3path /home/mcc/BenchKit//z3/bin/z3 -yices2path /home/mcc/BenchKit//yices/bin/yices -its -ltsminpath /home/mcc/BenchKit//lts_install_dir/ -greatspnpath /home/mcc/BenchKit//greatspn/ -order META -manyOrder -smt -timeout 3600 -vmargs -Dosgi.locking=none -Declipse.stateSaveDelayInterval=-1 -Dosgi.configuration.area=/tmp/.eclipse -Xss128m -Xms40m -Xmx16000m -Dfile.encoding=UTF-8 -Dosgi.requiredJavaVersion=1.6
Sequence of Actions to be Executed by the VM
This is useful if one wants to reexecute the tool in the VM from the submitted image disk.
set -x
# this is for BenchKit: configuration of major elements for the test
export BK_INPUT="RobotManipulation-PT-00001"
export BK_EXAMINATION="LTLFireability"
export BK_TOOL="itstools"
export BK_RESULT_DIR="/tmp/BK_RESULTS/OUTPUTS"
export BK_TIME_CONFINEMENT="3600"
export BK_MEMORY_CONFINEMENT="16384"
# this is specific to your benchmark or test
export BIN_DIR="$HOME/BenchKit/bin"
# remove the execution directoty if it exists (to avoid increse of .vmdk images)
if [ -d execution ] ; then
rm -rf execution
fi
# this is for BenchKit: explicit launching of the test
echo "====================================================================="
echo " Generated by BenchKit 2-4028"
echo " Executing tool itstools"
echo " Input is RobotManipulation-PT-00001, examination is LTLFireability"
echo " Time confinement is $BK_TIME_CONFINEMENT seconds"
echo " Memory confinement is 16384 MBytes"
echo " Number of cores is 4"
echo " Run identifier is r156-oct2-158972913700138"
echo "====================================================================="
echo
echo "--------------------"
echo "preparation of the directory to be used:"
tar xzf /home/mcc/BenchKit/INPUTS/RobotManipulation-PT-00001.tgz
mv RobotManipulation-PT-00001 execution
cd execution
if [ "LTLFireability" = "ReachabilityDeadlock" ] || [ "LTLFireability" = "UpperBounds" ] || [ "LTLFireability" = "QuasiLiveness" ] || [ "LTLFireability" = "StableMarking" ] || [ "LTLFireability" = "Liveness" ] || [ "LTLFireability" = "OneSafe" ] || [ "LTLFireability" = "StateSpace" ]; then
rm -f GenericPropertiesVerdict.xml
fi
pwd
ls -lh
echo
echo "--------------------"
echo "content from stdout:"
echo
echo "=== Data for post analysis generated by BenchKit (invocation template)"
echo
if [ "LTLFireability" = "UpperBounds" ] ; then
echo "The expected result is a vector of positive values"
echo NUM_VECTOR
elif [ "LTLFireability" != "StateSpace" ] ; then
echo "The expected result is a vector of booleans"
echo BOOL_VECTOR
else
echo "no data necessary for post analysis"
fi
echo
if [ -f "LTLFireability.txt" ] ; then
echo "here is the order used to build the result vector(from text file)"
for x in $(grep Property LTLFireability.txt | cut -d ' ' -f 2 | sort -u) ; do
echo "FORMULA_NAME $x"
done
elif [ -f "LTLFireability.xml" ] ; then # for cunf (txt files deleted;-)
echo echo "here is the order used to build the result vector(from xml file)"
for x in $(grep '
echo "FORMULA_NAME $x"
done
elif [ "LTLFireability" = "ReachabilityDeadlock" ] || [ "LTLFireability" = "QuasiLiveness" ] || [ "LTLFireability" = "StableMarking" ] || [ "LTLFireability" = "Liveness" ] || [ "LTLFireability" = "OneSafe" ] ; then
echo "FORMULA_NAME LTLFireability"
fi
echo
echo "=== Now, execution of the tool begins"
echo
echo -n "BK_START "
date -u +%s%3N
echo
timeout -s 9 $BK_TIME_CONFINEMENT bash -c "/home/mcc/BenchKit/BenchKit_head.sh 2> STDERR ; echo ; echo -n \"BK_STOP \" ; date -u +%s%3N"
if [ $? -eq 137 ] ; then
echo
echo "BK_TIME_CONFINEMENT_REACHED"
fi
echo
echo "--------------------"
echo "content from stderr:"
echo
cat STDERR ;