
About the Execution of M4M.full for RobotManipulation-PT-10000
| Execution Summary | |||||
| Max Memory Used (MB) |
Time wait (ms) | CPU Usage (ms) | I/O Wait (ms) | Computed Result | Execution Status |
| 15917.430 | 204468.00 | 151198.00 | 1976.20 | ???????????????? | normal |
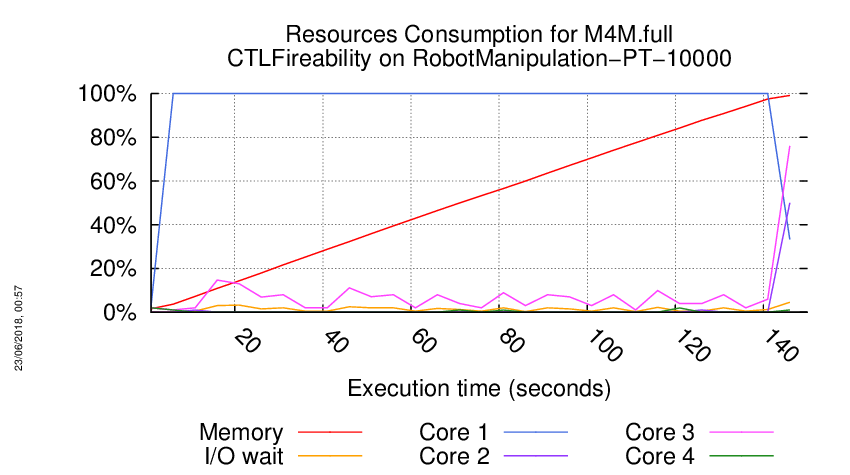
Execution Chart
We display below the execution chart for this examination (boot time has been removed).
Trace from the execution
Waiting for the VM to be ready (probing ssh)
...................
/home/mcc/execution
total 176K
-rw-r--r-- 1 mcc users 4.0K May 15 18:54 CTLCardinality.txt
-rw-r--r-- 1 mcc users 21K May 15 18:54 CTLCardinality.xml
-rw-r--r-- 1 mcc users 2.8K May 15 18:54 CTLFireability.txt
-rw-r--r-- 1 mcc users 17K May 15 18:54 CTLFireability.xml
-rw-r--r-- 1 mcc users 4.0K May 15 18:50 GenericPropertiesDefinition.xml
-rw-r--r-- 1 mcc users 6.2K May 15 18:50 GenericPropertiesVerdict.xml
-rw-r--r-- 1 mcc users 2.5K May 15 18:54 LTLCardinality.txt
-rw-r--r-- 1 mcc users 11K May 15 18:54 LTLCardinality.xml
-rw-r--r-- 1 mcc users 2.2K May 15 18:54 LTLFireability.txt
-rw-r--r-- 1 mcc users 11K May 15 18:54 LTLFireability.xml
-rw-r--r-- 1 mcc users 3.9K May 15 18:54 ReachabilityCardinality.txt
-rw-r--r-- 1 mcc users 19K May 15 18:54 ReachabilityCardinality.xml
-rw-r--r-- 1 mcc users 117 May 15 18:54 ReachabilityDeadlock.txt
-rw-r--r-- 1 mcc users 355 May 15 18:54 ReachabilityDeadlock.xml
-rw-r--r-- 1 mcc users 2.7K May 15 18:54 ReachabilityFireability.txt
-rw-r--r-- 1 mcc users 13K May 15 18:54 ReachabilityFireability.xml
-rw-r--r-- 1 mcc users 1.8K May 15 18:54 UpperBounds.txt
-rw-r--r-- 1 mcc users 3.8K May 15 18:54 UpperBounds.xml
-rw-r--r-- 1 mcc users 6 May 15 18:50 equiv_col
-rw-r--r-- 1 mcc users 6 May 15 18:50 instance
-rw-r--r-- 1 mcc users 6 May 15 18:50 iscolored
-rw-r--r-- 1 mcc users 6.3K May 15 18:50 model.pnml
=====================================================================
Generated by BenchKit 2-3637
Executing tool mcc4mcc-full
Input is RobotManipulation-PT-10000, examination is CTLFireability
Time confinement is 3600 seconds
Memory confinement is 16384 MBytes
Number of cores is 4
Run identifier is r154-smll-152685551600088
=====================================================================
--------------------
content from stdout:
=== Data for post analysis generated by BenchKit (invocation template)
The expected result is a vector of booleans
BOOL_VECTOR
here is the order used to build the result vector(from text file)
FORMULA_NAME RobotManipulation-PT-10000-CTLFireability-00
FORMULA_NAME RobotManipulation-PT-10000-CTLFireability-01
FORMULA_NAME RobotManipulation-PT-10000-CTLFireability-02
FORMULA_NAME RobotManipulation-PT-10000-CTLFireability-03
FORMULA_NAME RobotManipulation-PT-10000-CTLFireability-04
FORMULA_NAME RobotManipulation-PT-10000-CTLFireability-05
FORMULA_NAME RobotManipulation-PT-10000-CTLFireability-06
FORMULA_NAME RobotManipulation-PT-10000-CTLFireability-07
FORMULA_NAME RobotManipulation-PT-10000-CTLFireability-08
FORMULA_NAME RobotManipulation-PT-10000-CTLFireability-09
FORMULA_NAME RobotManipulation-PT-10000-CTLFireability-10
FORMULA_NAME RobotManipulation-PT-10000-CTLFireability-11
FORMULA_NAME RobotManipulation-PT-10000-CTLFireability-12
FORMULA_NAME RobotManipulation-PT-10000-CTLFireability-13
FORMULA_NAME RobotManipulation-PT-10000-CTLFireability-14
FORMULA_NAME RobotManipulation-PT-10000-CTLFireability-15
=== Now, execution of the tool begins
BK_START 1526951198504
BK_STOP 1526951402972
--------------------
content from stderr:
Prefix is 65b80f64.
Reading known information in /usr/share/mcc4mcc/65b80f64-known.json.
Reading learned information in /usr/share/mcc4mcc/65b80f64-learned.json.
Reading value translations in /usr/share/mcc4mcc/65b80f64-values.json.
Using directory /home/mcc/execution for input, as it contains a model.pnml file.
Using RobotManipulation-PT-10000 as instance name.
Using RobotManipulation as model name.
Using algorithm or tool voting-classifier.
Model characteristics are: {'Examination': 'CTLFireability', 'Place/Transition': True, 'Colored': False, 'Relative-Time': 1, 'Relative-Memory': 1, 'Ordinary': True, 'Simple Free Choice': False, 'Extended Free Choice': False, 'State Machine': False, 'Marked Graph': False, 'Connected': True, 'Strongly Connected': True, 'Source Place': False, 'Sink Place': False, 'Source Transition': False, 'Sink Transition': False, 'Loop Free': True, 'Conservative': False, 'Sub-Conservative': False, 'Nested Units': False, 'Safe': False, 'Deadlock': False, 'Reversible': True, 'Quasi Live': True, 'Live': True}.
/usr/local/lib/python3.6/dist-packages/sklearn/preprocessing/label.py:151: DeprecationWarning: The truth value of an empty array is ambiguous. Returning False, but in future this will result in an error. Use `array.size > 0` to check that an array is not empty.
if diff:
Known tools are: [{'Time': 2247788, 'Memory': 15948.23, 'Tool': 'lola'}].
Learned tools are: [{'Tool': 'lola'}].
Learned tool lola is 1.0x far from the best tool lola.
CTLFireability lola RobotManipulation-PT-10000...
Time: 3600 - MCC
----- Start make prepare stdout -----
----- Start make prepare stderr -----
===========================================================================================
RobotManipulation-PT-10000: translating PT Petri net model.pnml into LoLA format
===========================================================================================
translating PT Petri net complete
checking for too many tokens
===========================================================================================
RobotManipulation-PT-10000: translating PT formula CTLFireability into LoLA format
===========================================================================================
translating formula complete
touch formulae;
----- Start make result stdout -----
----- Start make result stderr -----
CTLFireability @ RobotManipulation-PT-10000 @ 3540 seconds
Makefile:222: recipe for target 'verify' failed
----- Start make result stdout -----
lola: LoLA will run for 3540 seconds at most (--timelimit)
lola: NET
lola: reading net from model.pnml.lola
lola: finished parsing
lola: closed net file model.pnml.lola
lola: 26/65536 symbol table entries, 0 collisions
lola: preprocessing...
lola: finding significant places
lola: 15 places, 11 transitions, 9 significant places
lola: computing forward-conflicting sets
lola: computing back-conflicting sets
lola: 14 transition conflict sets
lola: TASK
lola: reading formula from RobotManipulation-PT-10000-CTLFireability.task
make: [verify] Error 134 (ignored)
----- Start make result stderr -----
lola: A (F (((A (F (FIREABLE(p_sop))) AND E (X (FIREABLE(r_starts)))) OR A (X ((FIREABLE(p_sop) AND FIREABLE(p_relSC))))))) : (E (F (A (G ((FIREABLE(p_move) AND FIREABLE(p_intoSC)))))) OR E (X ((FIREABLE(p_intoSC) OR (FIREABLE(p_moved) AND FIREABLE(r_starts)))))) : NOT(E (F (A (G (NOT FIREABLE(p_moved)))))) : (A (F (E (X ((FIREABLE(p_intoSC) OR FIREABLE(r_begin_move)))))) OR (A (((FIREABLE(p_intoSC) OR FIREABLE(p_relSC)) U (FIREABLE(r_end_move)))) AND FIREABLE(p_started))) : NOT(A (F (A ((FIREABLE(p_move) U FIREABLE(p_sop)))))) : NOT(E (F (E (G (NOT FIREABLE(p_start)))))) : E (F ((A (X ((FIREABLE(p_started) OR FIREABLE(p_sop)))) AND (A (G (FIREABLE(p_move))) AND E (F (FIREABLE(r_end_move))))))) : E (F (A (G (FIREABLE(r_end_move))))) : NOT(E (G ((NOT FIREABLE(p_moved) AND NOT FIREABLE(r_stops))))) : (((FIREABLE(p_sop) AND A (X ((FIREABLE(p_intoSC) OR FIREABLE(p_started))))) AND FIREABLE(r_end_move)) OR A (G ((((FIREABLE(p_move) OR FIREABLE(p_intoSC)) AND FIREABLE(r_begin_move)) OR E (F (FIREABLE(r_starts))))))) : A (F ((NOT FIREABLE(p_move) AND NOT FIREABLE(p_moved) AND FIREABLE(p_intoSC)))) : A (F (((E (X (FIREABLE(p_intoSC))) AND FIREABLE(p_started)) AND (FIREABLE(p_intoSC) OR ((FIREABLE(p_started) OR FIREABLE(p_relSC)) AND NOT FIREABLE(p_relSC)))))) : NOT((((FIREABLE(r_end_move) AND FIREABLE(r_starts)) OR A (F ((FIREABLE(p_started) OR FIREABLE(p_sop))))) AND NOT((E (G (FIREABLE(r_starts))) OR FIREABLE(r_stops))))) : A (G (((FIREABLE(r_stops) OR A (X (FIREABLE(p_relSC)))) OR FIREABLE(p_start)))) : (A (F (FIREABLE(p_intoSC))) OR A (G (NOT(E (G (FIREABLE(p_intoSC))))))) : A ((NOT(A (G (FIREABLE(p_relSC)))) U A (F ((FIREABLE(p_sop) AND FIREABLE(p_start))))))
lola: computing a collection of formulas
lola: RUNNING
lola: subprocess 0 will run for 221 seconds at most (--localtimelimit=-1)
lola: ========================================
lola: ...considering subproblem: A (F (((A (F (FIREABLE(p_sop))) AND E (X (FIREABLE(r_starts)))) OR A (X ((FIREABLE(p_sop) AND FIREABLE(p_relSC)))))))
lola: ========================================
lola: SUBTASK
lola: checking CTL
lola: processed formula: A(TRUE U ((A(TRUE U FIREABLE(p_sop)) AND EX(FIREABLE(r_starts))) OR AX((FIREABLE(p_sop) AND FIREABLE(p_relSC)))))
lola: processed formula length: 113
lola: 4 rewrites
lola: formula mentions 0 of 15 places; total mentions: 0
lola: closed formula file RobotManipulation-PT-10000-CTLFireability.task
lola: STORE
lola: using a bit-perfect encoder (--encoder=bit)
lola: using 36 bytes per marking, with 0 unused bits
lola: using a prefix tree store (--store=prefix)
lola: Formula contains EX or AX operators, stubborn sets not applicable
lola: RUNNING
lola: CTL formula contains 2 significant temporal operators and needs 9 bytes of payload
lola: Ignoring fairness constraints (--fair).
lola: 5059229 markings, 7566207 edges, 1011846 markings/sec, 0 secs
lola: 10264359 markings, 15371464 edges, 1041026 markings/sec, 5 secs
lola: 15136578 markings, 22684189 edges, 974444 markings/sec, 10 secs
lola: 20126357 markings, 30161491 edges, 997956 markings/sec, 15 secs
lola: 25313348 markings, 37947588 edges, 1037398 markings/sec, 20 secs
lola: 30347087 markings, 45491779 edges, 1006748 markings/sec, 25 secs
lola: 35339889 markings, 52986128 edges, 998560 markings/sec, 30 secs
lola: 40181289 markings, 60251355 edges, 968280 markings/sec, 35 secs
----- Kill lola and sara stderr -----
lola: 45347355 markings, 67993902 edges, 1033213 markings/sec, 40 secs
lola: 50349844 markings, 75502738 edges, 1000498 markings/sec, 45 secs
lola: 55291769 markings, 82908133 edges, 988385 markings/sec, 50 secs
lola: 60119409 markings, 90157957 edges, 965528 markings/sec, 55 secs
lola: 65036913 markings, 97531185 edges, 983501 markings/sec, 60 secs
lola: 69735296 markings, 104574991 edges, 939677 markings/sec, 65 secs
lola: 74397580 markings, 111569500 edges, 932457 markings/sec, 70 secs
lola: 79023143 markings, 118512606 edges, 925113 markings/sec, 75 secs
lola: 84121283 markings, 126156763 edges, 1019628 markings/sec, 80 secs
lola: 89055519 markings, 133560090 edges, 986847 markings/sec, 85 secs
lola: 93933685 markings, 140878621 edges, 975633 markings/sec, 90 secs
lola: 98825054 markings, 148211009 edges, 978274 markings/sec, 95 secs
lola: 103642666 markings, 155436485 edges, 963522 markings/sec, 100 secs
lola: 108415524 markings, 162598629 edges, 954572 markings/sec, 105 secs
lola: 113010137 markings, 169491370 edges, 918923 markings/sec, 110 secs
lola: 117874284 markings, 176789484 edges, 972829 markings/sec, 115 secs
lola: 122453284 markings, 183656019 edges, 915800 markings/sec, 120 secs
lola: 126986197 markings, 190450123 edges, 906583 markings/sec, 125 secs
lola: 131591766 markings, 197359462 edges, 921114 markings/sec, 130 secs
lola: 136275175 markings, 204389752 edges, 936682 markings/sec, 135 secs
lola: 136919264 markings, 205353279 edges, 128818 markings/sec, 140 secs
lola: 136925527 markings, 205365804 edges, 1253 markings/sec, 145 secs
lola: 136936286 markings, 205377756 edges, 2152 markings/sec, 150 secs
lola: 136946979 markings, 205392488 edges, 2139 markings/sec, 155 secs
lola: 136946994 markings, 205392517 edges, 3 markings/sec, 160 secs
lola: 136947015 markings, 205392558 edges, 4 markings/sec, 165 secs
lola: Child process aborted or communication problem between parent and child process
terminate called after throwing an instance of 'std::runtime_error'
what(): parse error at position 1: unexpected character, last read: '\ufffd'
Aborted (core dumped)
FORMULA RobotManipulation-PT-10000-CTLFireability-0 CANNOT_COMPUTE TECHNIQUES COLLATERAL_PROCESSING EXPLICIT STATE_COMPRESSION STUBBORN_SETS TOPOLOGICAL USE_NUPN
FORMULA RobotManipulation-PT-10000-CTLFireability-1 CANNOT_COMPUTE TECHNIQUES COLLATERAL_PROCESSING EXPLICIT STATE_COMPRESSION STUBBORN_SETS TOPOLOGICAL USE_NUPN
FORMULA RobotManipulation-PT-10000-CTLFireability-2 CANNOT_COMPUTE TECHNIQUES COLLATERAL_PROCESSING EXPLICIT STATE_COMPRESSION STUBBORN_SETS TOPOLOGICAL USE_NUPN
FORMULA RobotManipulation-PT-10000-CTLFireability-3 CANNOT_COMPUTE TECHNIQUES COLLATERAL_PROCESSING EXPLICIT STATE_COMPRESSION STUBBORN_SETS TOPOLOGICAL USE_NUPN
FORMULA RobotManipulation-PT-10000-CTLFireability-4 CANNOT_COMPUTE TECHNIQUES COLLATERAL_PROCESSING EXPLICIT STATE_COMPRESSION STUBBORN_SETS TOPOLOGICAL USE_NUPN
FORMULA RobotManipulation-PT-10000-CTLFireability-5 CANNOT_COMPUTE TECHNIQUES COLLATERAL_PROCESSING EXPLICIT STATE_COMPRESSION STUBBORN_SETS TOPOLOGICAL USE_NUPN
FORMULA RobotManipulation-PT-10000-CTLFireability-6 CANNOT_COMPUTE TECHNIQUES COLLATERAL_PROCESSING EXPLICIT STATE_COMPRESSION STUBBORN_SETS TOPOLOGICAL USE_NUPN
FORMULA RobotManipulation-PT-10000-CTLFireability-7 CANNOT_COMPUTE TECHNIQUES COLLATERAL_PROCESSING EXPLICIT STATE_COMPRESSION STUBBORN_SETS TOPOLOGICAL USE_NUPN
FORMULA RobotManipulation-PT-10000-CTLFireability-8 CANNOT_COMPUTE TECHNIQUES COLLATERAL_PROCESSING EXPLICIT STATE_COMPRESSION STUBBORN_SETS TOPOLOGICAL USE_NUPN
FORMULA RobotManipulation-PT-10000-CTLFireability-9 CANNOT_COMPUTE TECHNIQUES COLLATERAL_PROCESSING EXPLICIT STATE_COMPRESSION STUBBORN_SETS TOPOLOGICAL USE_NUPN
FORMULA RobotManipulation-PT-10000-CTLFireability-10 CANNOT_COMPUTE TECHNIQUES COLLATERAL_PROCESSING EXPLICIT STATE_COMPRESSION STUBBORN_SETS TOPOLOGICAL USE_NUPN
FORMULA RobotManipulation-PT-10000-CTLFireability-11 CANNOT_COMPUTE TECHNIQUES COLLATERAL_PROCESSING EXPLICIT STATE_COMPRESSION STUBBORN_SETS TOPOLOGICAL USE_NUPN
FORMULA RobotManipulation-PT-10000-CTLFireability-12 CANNOT_COMPUTE TECHNIQUES COLLATERAL_PROCESSING EXPLICIT STATE_COMPRESSION STUBBORN_SETS TOPOLOGICAL USE_NUPN
FORMULA RobotManipulation-PT-10000-CTLFireability-13 CANNOT_COMPUTE TECHNIQUES COLLATERAL_PROCESSING EXPLICIT STATE_COMPRESSION STUBBORN_SETS TOPOLOGICAL USE_NUPN
FORMULA RobotManipulation-PT-10000-CTLFireability-14 CANNOT_COMPUTE TECHNIQUES COLLATERAL_PROCESSING EXPLICIT STATE_COMPRESSION STUBBORN_SETS TOPOLOGICAL USE_NUPN
FORMULA RobotManipulation-PT-10000-CTLFireability-15 CANNOT_COMPUTE TECHNIQUES COLLATERAL_PROCESSING EXPLICIT STATE_COMPRESSION STUBBORN_SETS TOPOLOGICAL USE_NUPN
----- Kill lola and sara stdout -----
----- Finished stderr -----
----- Finished stdout -----
Sequence of Actions to be Executed by the VM
This is useful if one wants to reexecute the tool in the VM from the submitted image disk.
set -x
# this is for BenchKit: configuration of major elements for the test
export BK_INPUT="RobotManipulation-PT-10000"
export BK_EXAMINATION="CTLFireability"
export BK_TOOL="mcc4mcc-full"
export BK_RESULT_DIR="/tmp/BK_RESULTS/OUTPUTS"
export BK_TIME_CONFINEMENT="3600"
export BK_MEMORY_CONFINEMENT="16384"
# this is specific to your benchmark or test
export BIN_DIR="$HOME/BenchKit/bin"
# remove the execution directoty if it exists (to avoid increse of .vmdk images)
if [ -d execution ] ; then
rm -rf execution
fi
tar xzf /home/mcc/BenchKit/INPUTS/RobotManipulation-PT-10000.tgz
mv RobotManipulation-PT-10000 execution
cd execution
pwd
ls -lh
# this is for BenchKit: explicit launching of the test
echo "====================================================================="
echo " Generated by BenchKit 2-3637"
echo " Executing tool mcc4mcc-full"
echo " Input is RobotManipulation-PT-10000, examination is CTLFireability"
echo " Time confinement is $BK_TIME_CONFINEMENT seconds"
echo " Memory confinement is 16384 MBytes"
echo " Number of cores is 4"
echo " Run identifier is r154-smll-152685551600088"
echo "====================================================================="
echo
echo "--------------------"
echo "content from stdout:"
echo
echo "=== Data for post analysis generated by BenchKit (invocation template)"
echo
if [ "CTLFireability" = "UpperBounds" ] ; then
echo "The expected result is a vector of positive values"
echo NUM_VECTOR
elif [ "CTLFireability" != "StateSpace" ] ; then
echo "The expected result is a vector of booleans"
echo BOOL_VECTOR
else
echo "no data necessary for post analysis"
fi
echo
if [ -f "CTLFireability.txt" ] ; then
echo "here is the order used to build the result vector(from text file)"
for x in $(grep Property CTLFireability.txt | cut -d ' ' -f 2 | sort -u) ; do
echo "FORMULA_NAME $x"
done
elif [ -f "CTLFireability.xml" ] ; then # for cunf (txt files deleted;-)
echo echo "here is the order used to build the result vector(from xml file)"
for x in $(grep '
echo "FORMULA_NAME $x"
done
fi
echo
echo "=== Now, execution of the tool begins"
echo
echo -n "BK_START "
date -u +%s%3N
echo
timeout -s 9 $BK_TIME_CONFINEMENT bash -c "/home/mcc/BenchKit/BenchKit_head.sh 2> STDERR ; echo ; echo -n \"BK_STOP \" ; date -u +%s%3N"
if [ $? -eq 137 ] ; then
echo
echo "BK_TIME_CONFINEMENT_REACHED"
fi
echo
echo "--------------------"
echo "content from stderr:"
echo
cat STDERR ;