
About the Execution of M4M.full for RobotManipulation-PT-01000
| Execution Summary | |||||
| Max Memory Used (MB) |
Time wait (ms) | CPU Usage (ms) | I/O Wait (ms) | Computed Result | Execution Status |
| 429.140 | 46608.00 | 7326.00 | 661.10 | FFFFTTTFFFTFFFTF | normal |
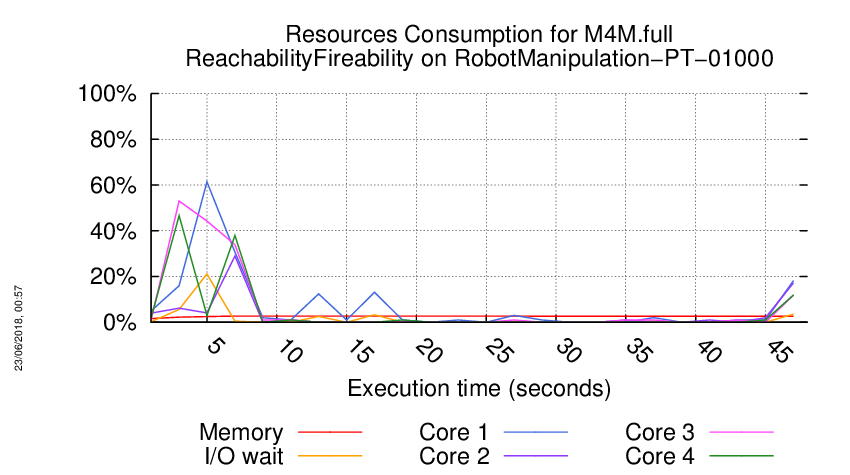
Execution Chart
We display below the execution chart for this examination (boot time has been removed).
Trace from the execution
Waiting for the VM to be ready (probing ssh)
.....................
/home/mcc/execution
total 188K
-rw-r--r-- 1 mcc users 3.8K May 15 18:54 CTLCardinality.txt
-rw-r--r-- 1 mcc users 20K May 15 18:54 CTLCardinality.xml
-rw-r--r-- 1 mcc users 2.9K May 15 18:54 CTLFireability.txt
-rw-r--r-- 1 mcc users 17K May 15 18:54 CTLFireability.xml
-rw-r--r-- 1 mcc users 4.0K May 15 18:50 GenericPropertiesDefinition.xml
-rw-r--r-- 1 mcc users 6.2K May 15 18:50 GenericPropertiesVerdict.xml
-rw-r--r-- 1 mcc users 2.6K May 15 18:54 LTLCardinality.txt
-rw-r--r-- 1 mcc users 11K May 15 18:54 LTLCardinality.xml
-rw-r--r-- 1 mcc users 2.1K May 15 18:54 LTLFireability.txt
-rw-r--r-- 1 mcc users 8.3K May 15 18:54 LTLFireability.xml
-rw-r--r-- 1 mcc users 4.2K May 15 18:54 ReachabilityCardinality.txt
-rw-r--r-- 1 mcc users 21K May 15 18:54 ReachabilityCardinality.xml
-rw-r--r-- 1 mcc users 117 May 15 18:54 ReachabilityDeadlock.txt
-rw-r--r-- 1 mcc users 355 May 15 18:54 ReachabilityDeadlock.xml
-rw-r--r-- 1 mcc users 3.7K May 15 18:54 ReachabilityFireability.txt
-rw-r--r-- 1 mcc users 22K May 15 18:54 ReachabilityFireability.xml
-rw-r--r-- 1 mcc users 1.8K May 15 18:54 UpperBounds.txt
-rw-r--r-- 1 mcc users 3.8K May 15 18:54 UpperBounds.xml
-rw-r--r-- 1 mcc users 6 May 15 18:50 equiv_col
-rw-r--r-- 1 mcc users 6 May 15 18:50 instance
-rw-r--r-- 1 mcc users 6 May 15 18:50 iscolored
-rw-r--r-- 1 mcc users 6.3K May 15 18:50 model.pnml
=====================================================================
Generated by BenchKit 2-3637
Executing tool mcc4mcc-full
Input is RobotManipulation-PT-01000, examination is ReachabilityFireability
Time confinement is 3600 seconds
Memory confinement is 16384 MBytes
Number of cores is 4
Run identifier is r154-smll-152685551600070
=====================================================================
--------------------
content from stdout:
=== Data for post analysis generated by BenchKit (invocation template)
The expected result is a vector of booleans
BOOL_VECTOR
here is the order used to build the result vector(from text file)
FORMULA_NAME RobotManipulation-PT-01000-ReachabilityFireability-00
FORMULA_NAME RobotManipulation-PT-01000-ReachabilityFireability-01
FORMULA_NAME RobotManipulation-PT-01000-ReachabilityFireability-02
FORMULA_NAME RobotManipulation-PT-01000-ReachabilityFireability-03
FORMULA_NAME RobotManipulation-PT-01000-ReachabilityFireability-04
FORMULA_NAME RobotManipulation-PT-01000-ReachabilityFireability-05
FORMULA_NAME RobotManipulation-PT-01000-ReachabilityFireability-06
FORMULA_NAME RobotManipulation-PT-01000-ReachabilityFireability-07
FORMULA_NAME RobotManipulation-PT-01000-ReachabilityFireability-08
FORMULA_NAME RobotManipulation-PT-01000-ReachabilityFireability-09
FORMULA_NAME RobotManipulation-PT-01000-ReachabilityFireability-10
FORMULA_NAME RobotManipulation-PT-01000-ReachabilityFireability-11
FORMULA_NAME RobotManipulation-PT-01000-ReachabilityFireability-12
FORMULA_NAME RobotManipulation-PT-01000-ReachabilityFireability-13
FORMULA_NAME RobotManipulation-PT-01000-ReachabilityFireability-14
FORMULA_NAME RobotManipulation-PT-01000-ReachabilityFireability-15
=== Now, execution of the tool begins
BK_START 1526944329900
BK_STOP 1526944376508
--------------------
content from stderr:
Prefix is 65b80f64.
Reading known information in /usr/share/mcc4mcc/65b80f64-known.json.
Reading learned information in /usr/share/mcc4mcc/65b80f64-learned.json.
Reading value translations in /usr/share/mcc4mcc/65b80f64-values.json.
Using directory /home/mcc/execution for input, as it contains a model.pnml file.
Using RobotManipulation-PT-01000 as instance name.
Using RobotManipulation as model name.
Using algorithm or tool decision-tree.
Model characteristics are: {'Examination': 'ReachabilityFireability', 'Place/Transition': True, 'Colored': False, 'Relative-Time': 1, 'Relative-Memory': 1, 'Ordinary': True, 'Simple Free Choice': False, 'Extended Free Choice': False, 'State Machine': False, 'Marked Graph': False, 'Connected': True, 'Strongly Connected': True, 'Source Place': False, 'Sink Place': False, 'Source Transition': False, 'Sink Transition': False, 'Loop Free': True, 'Conservative': False, 'Sub-Conservative': False, 'Nested Units': False, 'Safe': False, 'Deadlock': False, 'Reversible': True, 'Quasi Live': True, 'Live': True}.
Known tools are: [{'Time': 242, 'Memory': 105.68, 'Tool': 'lola'}].
Learned tools are: [{'Tool': 'lola'}].
Learned tool lola is 1.0x far from the best tool lola.
ReachabilityFireability lola RobotManipulation-PT-01000...
Time: 3600 - MCC
----- Start make prepare stdout -----
----- Start make prepare stderr -----
===========================================================================================
RobotManipulation-PT-01000: translating PT Petri net model.pnml into LoLA format
===========================================================================================
translating PT Petri net complete
checking for too many tokens
===========================================================================================
RobotManipulation-PT-01000: translating PT formula ReachabilityFireability into LoLA format
===========================================================================================
translating formula complete
touch formulae;
----- Start make result stderr -----
----- Start make result stdout -----
ReachabilityFireability @ RobotManipulation-PT-01000 @ 3539 seconds
----- Start make result stderr -----
----- Start make result stdout -----
lola: LoLA will run for 3539 seconds at most (--timelimit)
lola: NET
lola: reading net from model.pnml.lola
lola: finished parsing
lola: closed net file model.pnml.lola
lola: 26/65536 symbol table entries, 0 collisions
lola: preprocessing...
lola: finding significant places
lola: 15 places, 11 transitions, 9 significant places
lola: computing forward-conflicting sets
lola: computing back-conflicting sets
lola: 14 transition conflict sets
lola: TASK
lola: reading formula from RobotManipulation-PT-01000-ReachabilityFireability.task
lola: E (F (())) : A (G (FIREABLE(p_start))) : E (F ((NOT FIREABLE(p_move) AND (NOT FIREABLE(r_stops) OR NOT FIREABLE(r_begin_move)) AND FIREABLE(p_moved) AND FIREABLE(r_begin_move) AND FIREABLE(r_stops) AND FIREABLE(r_begin_move) AND FIREABLE(r_starts) AND NOT FIREABLE(r_end_move)))) : A (G (FIREABLE(p_start))) : A (G (())) : A (G (())) : E (F ((((NOT FIREABLE(p_start) AND NOT FIREABLE(p_move)) OR (NOT FIREABLE(r_end_move) AND NOT FIREABLE(p_started))) AND FIREABLE(r_end_move)))) : A (G ((FIREABLE(p_start) OR (FIREABLE(p_started) AND FIREABLE(r_begin_move) AND FIREABLE(p_move)) OR (FIREABLE(p_relSC) AND FIREABLE(r_stops))))) : A (G (((FIREABLE(p_sop)) OR NOT FIREABLE(r_starts) OR FIREABLE(p_start) OR NOT FIREABLE(p_started)))) : A (G ((FIREABLE(p_start) OR ((FIREABLE(p_intoSC) OR FIREABLE(p_start) OR FIREABLE(r_begin_move)) AND (FIREABLE(p_sop) OR (FIREABLE(p_intoSC))))))) : A (G ((FIREABLE(p_sop) OR FIREABLE(p_moved) OR NOT FIREABLE(p_intoSC)))) : A (G ((((FIREABLE(r_stops) OR FIREABLE(p_start)) AND NOT FIREABLE(p_started)) OR (FIREABLE(r_end_move) AND FIREABLE(p_moved) AND NOT FIREABLE(p_start)) OR FIREABLE(p_start) OR FIREABLE(p_relSC)))) : A (G (((NOT FIREABLE(p_start) AND NOT FIREABLE(p_sop) AND FIREABLE(r_stops)) OR FIREABLE(p_start)))) : A (G (((FIREABLE(r_end_move) AND FIREABLE(p_relSC) AND (FIREABLE(r_starts) OR FIREABLE(p_start)) AND (FIREABLE(r_begin_move) OR (FIREABLE(r_begin_move) AND FIREABLE(r_starts)))) OR FIREABLE(p_start)))) : A (G ((NOT FIREABLE(p_relSC) OR NOT FIREABLE(r_end_move) OR NOT FIREABLE(r_begin_move) OR (FIREABLE(p_relSC) AND FIREABLE(r_end_move))))) : E (F (()))
lola: computing a collection of formulas
lola: RUNNING
lola: subprocess 0 will run for 221 seconds at most (--localtimelimit=-1)
lola: ========================================
lola: ...considering subproblem: E (F (()))
lola: ========================================
lola: SUBTASK
lola: checking initial satisfaction
lola: processed formula: FALSE
lola: processed formula length: 5
lola: 3 rewrites
lola: formula mentions 0 of 15 places; total mentions: 0
lola: closed formula file RobotManipulation-PT-01000-ReachabilityFireability.task
lola: processed formula with 0 atomic propositions
lola: RUNNING
lola: SUBRESULT
lola: result: no
lola: produced by: preprocessing
lola: The net violates the given property already in its initial state.
lola: 0 markings, 0 edges
lola: ========================================
lola: subprocess 1 will run for 235 seconds at most (--localtimelimit=-1)
lola: ========================================
lola: ...considering subproblem: A (G (FIREABLE(p_start)))
lola: ========================================
lola: SUBTASK
lola: checking invariance
lola: Planning: workflow for reachability check: stateequation||search (--findpath=off)
lola: STORE
lola: using a bit-perfect encoder (--encoder=bit)
lola: using 36 bytes per marking, with 0 unused bits
lola: using a prefix tree store (--store=prefix)
lola: SEARCH (state space)
lola: state space: using reachability graph (--search=depth)
lola: state space: using reachability preserving stubborn set method with insertion algorithm (--stubborn=tarjan)
lola: RUNNING
lola: state equation: Generated DNF with 1 literals and 1 conjunctive subformulas
lola: SUBRESULT
lola: result: no
lola: produced by: state space
lola: The predicate is not invariant.
lola: 2002 markings, 2001 edges
lola: ========================================
lola: subprocess 2 will run for 252 seconds at most (--localtimelimit=-1)
lola: ========================================
lola: ...considering subproblem: E (F ((NOT FIREABLE(p_move) AND (NOT FIREABLE(r_stops) OR NOT FIREABLE(r_begin_move)) AND FIREABLE(p_moved) AND FIREABLE(r_begin_move) AND FIREABLE(r_stops) AND FIREABLE(r_begin_move) AND FIREABLE(r_starts) AND NOT FIREABLE(r_end_move))))
lola: ========================================
lola: SUBTASK
lola: checking reachability
lola: Planning: workflow for reachability check: stateequation||search (--findpath=off)
lola: STORE
lola: using a bit-perfect encoder (--encoder=bit)
lola: using 36 bytes per marking, with 0 unused bits
lola: using a prefix tree store (--store=prefix)
lola: SEARCH (state space)
lola: state space: using reachability graph (--search=depth)
lola: state space: using reachability preserving stubborn set method with insertion algorithm (--stubborn=tarjan)
lola: RUNNING
lola: state equation: State predicate is contradiction.
lola: SUBRESULT
lola: result: no
lola: produced by: state equation
lola: The predicate is unreachable.
lola: ========================================
lola: subprocess 3 will run for 272 seconds at most (--localtimelimit=-1)
lola: ========================================
lola: ...considering subproblem: A (G (FIREABLE(p_start)))
lola: ========================================
lola: SUBTASK
lola: checking invariance
lola: Planning: workflow for reachability check: stateequation||search (--findpath=off)
lola: STORE
lola: using a bit-perfect encoder (--encoder=bit)
lola: using 36 bytes per marking, with 0 unused bits
lola: using a prefix tree store (--store=prefix)
lola: SEARCH (state space)
lola: state space: using reachability graph (--search=depth)
lola: state space: using reachability preserving stubborn set method with insertion algorithm (--stubborn=tarjan)
lola: RUNNING
lola: state equation: Generated DNF with 1 literals and 1 conjunctive subformulas
lola: state equation: write sara problem file to RobotManipulation-PT-01000-ReachabilityFireability-3.sara
lola: state equation: calling and running sara
lola: SUBRESULT
lola: result: no
lola: produced by: state space
lola: The predicate is not invariant.
lola: 2002 markings, 2001 edges
lola: ========================================
lola: subprocess 4 will run for 294 seconds at most (--localtimelimit=-1)
lola: ========================================
lola: ...considering subproblem: A (G (()))
lola: ========================================
lola: SUBTASK
lola: checking initial satisfaction
lola: processed formula: TRUE
lola: processed formula length: 4
lola: 3 rewrites
lola: formula mentions 0 of 15 places; total mentions: 0
lola: closed formula file RobotManipulation-PT-01000-ReachabilityFireability.task
lola: processed formula with 0 atomic propositions
lola: RUNNING
lola: SUBRESULT
lola: result: yes
lola: produced by: preprocessing
lola: The net satisfies the property already in its initial state.
lola: 0 markings, 0 edges
lola: ========================================
lola: subprocess 5 will run for 321 seconds at most (--localtimelimit=-1)
lola: ========================================
lola: ...considering subproblem: A (G (()))
lola: ========================================
lola: SUBTASK
lola: checking initial satisfaction
lola: processed formula: TRUE
lola: processed formula length: 4
lola: 3 rewrites
lola: formula mentions 0 of 15 places; total mentions: 0
lola: closed formula file RobotManipulation-PT-01000-ReachabilityFireability.task
lola: processed formula with 0 atomic propositions
lola: RUNNING
lola: SUBRESULT
lola: result: yes
lola: produced by: preprocessing
lola: The net satisfies the property already in its initial state.
lola: 0 markings, 0 edges
lola: ========================================
lola: subprocess 6 will run for 353 seconds at most (--localtimelimit=-1)
lola: ========================================
lola: ...considering subproblem: E (F ((((NOT FIREABLE(p_start) AND NOT FIREABLE(p_move)) OR (NOT FIREABLE(r_end_move) AND NOT FIREABLE(p_started))) AND FIREABLE(r_end_move))))
lola: ========================================
lola: SUBTASK
lola: checking reachability
lola: Planning: workflow for reachability check: stateequation||search (--findpath=off)
lola: STORE
lola: using a bit-perfect encoder (--encoder=bit)
lola: using 36 bytes per marking, with 0 unused bits
lola: using a prefix tree store (--store=prefix)
lola: SEARCH (state space)
lola: state space: using reachability graph (--search=depth)
lola: state space: using reachability preserving stubborn set method with insertion algorithm (--stubborn=tarjan)
lola: RUNNING
lola: state equation: Generated DNF with 3 literals and 1 conjunctive subformulas
lola: state equation: write sara problem file to RobotManipulation-PT-01000-ReachabilityFireability-6.sara
lola: state equation: calling and running sara
sara: try reading problem file RobotManipulation-PT-01000-ReachabilityFireability-6.sara.
lola: SUBRESULT
lola: result: yes
lola: produced by: state space
lola: The predicate is reachable.
lola: 14003 markings, 14003 edges
lola: ========================================
lola: subprocess 7 will run for 393 seconds at most (--localtimelimit=-1)
lola: ========================================
lola: ...considering subproblem: A (G ((FIREABLE(p_start) OR (FIREABLE(p_started) AND FIREABLE(r_begin_move) AND FIREABLE(p_move)) OR (FIREABLE(p_relSC) AND FIREABLE(r_stops)))))
lola: ========================================
lola: SUBTASK
lola: checking invariance
lola: Planning: workflow for reachability check: stateequation||search (--findpath=off)
lola: STORE
lola: using a bit-perfect encoder (--encoder=bit)
lola: using 36 bytes per marking, with 0 unused bits
lola: using a prefix tree store (--store=prefix)
lola: SEARCH (state space)
lola: state space: using reachability graph (--search=depth)
lola: state space: using reachability preserving stubborn set method with insertion algorithm (--stubborn=tarjan)
lola: RUNNING
lola: SUBRESULT
lola: result: no
lola: produced by: state space
lola: The predicate is not invariant.
lola: 2002 markings, 2001 edges
lola: state equation: Generated DNF with 45 literals and 15 conjunctive subformulas
lola: ========================================
lola: subprocess 8 will run for 442 seconds at most (--localtimelimit=-1)
lola: ========================================
lola: ...considering subproblem: A (G (((FIREABLE(p_sop)) OR NOT FIREABLE(r_starts) OR FIREABLE(p_start) OR NOT FIREABLE(p_started))))
lola: ========================================
lola: SUBTASK
lola: checking invariance
lola: Planning: workflow for reachability check: stateequation||search (--findpath=off)
lola: STORE
lola: using a bit-perfect encoder (--encoder=bit)
lola: using 36 bytes per marking, with 0 unused bits
lola: using a prefix tree store (--store=prefix)
lola: SEARCH (state space)
lola: state space: using reachability graph (--search=depth)
lola: state space: using reachability preserving stubborn set method with insertion algorithm (--stubborn=tarjan)
lola: RUNNING
lola: state equation: Generated DNF with 6 literals and 1 conjunctive subformulas
lola: state equation: write sara problem file to RobotManipulation-PT-01000-ReachabilityFireability-8.sara
lola: state equation: calling and running sara
lola: SUBRESULT
lola: result: no
lola: produced by: state space
lola: The predicate is not invariant.
lola: 2003 markings, 2002 edges
lola: ========================================
lola: subprocess 9 will run for 505 seconds at most (--localtimelimit=-1)
lola: ========================================
lola: ...considering subproblem: A (G ((FIREABLE(p_start) OR ((FIREABLE(p_intoSC) OR FIREABLE(p_start) OR FIREABLE(r_begin_move)) AND (FIREABLE(p_sop) OR (FIREABLE(p_intoSC)))))))
lola: ========================================
lola: SUBTASK
lola: checking invariance
lola: Planning: workflow for reachability check: stateequation||search (--findpath=off)
lola: STORE
lola: using a bit-perfect encoder (--encoder=bit)
lola: using 36 bytes per marking, with 0 unused bits
lola: using a prefix tree store (--store=prefix)
lola: SEARCH (state space)
lola: state space: using reachability graph (--search=depth)
lola: state space: using reachability preserving stubborn set method with insertion algorithm (--stubborn=tarjan)
lola: RUNNING
lola: state equation: Generated DNF with 22 literals and 6 conjunctive subformulas
lola: state equation: write sara problem file to RobotManipulation-PT-01000-ReachabilityFireability-9.sara
lola: SUBRESULT
lola: result: no
lola: produced by: state space
lola: The predicate is not invariant.
lola: 2002 markings, 2001 edges
lola: ========================================
lola: subprocess 10 will run for 589 seconds at most (--localtimelimit=-1)
lola: ========================================
lola: ...considering subproblem: A (G ((FIREABLE(p_sop) OR FIREABLE(p_moved) OR NOT FIREABLE(p_intoSC))))
lola: ========================================
lola: SUBTASK
lola: checking invariance
lola: Planning: workflow for reachability check: stateequation||search (--findpath=off)
lola: STORE
lola: using a bit-perfect encoder (--encoder=bit)
lola: using 36 bytes per marking, with 0 unused bits
lola: using a prefix tree store (--store=prefix)
lola: SEARCH (state space)
lola: state space: using reachability graph (--search=depth)
lola: state space: using reachability preserving stubborn set method with insertion algorithm (--stubborn=tarjan)
lola: RUNNING
lola: state equation: State predicate is contradiction.
lola: SUBRESULT
lola: result: yes
lola: produced by: state equation
lola: The predicate is invariant.
lola: subprocess 11 will run for 707 seconds at most (--localtimelimit=-1)
lola: ========================================
lola: ...considering subproblem: A (G ((((FIREABLE(r_stops) OR FIREABLE(p_start)) AND NOT FIREABLE(p_started)) OR (FIREABLE(r_end_move) AND FIREABLE(p_moved) AND NOT FIREABLE(p_start)) OR FIREABLE(p_start) OR FIREABLE(p_relSC))))
lola: ========================================
lola: SUBTASK
lola: checking invariance
lola: Planning: workflow for reachability check: stateequation||search (--findpath=off)
lola: STORE
lola: using a bit-perfect encoder (--encoder=bit)
lola: using 36 bytes per marking, with 0 unused bits
lola: using a prefix tree store (--store=prefix)
lola: SEARCH (state space)
lola: state space: using reachability graph (--search=depth)
lola: state space: using reachability preserving stubborn set method with insertion algorithm (--stubborn=tarjan)
lola: RUNNING
lola: ========================================
lola: state equation: Generated DNF with 45 literals and 9 conjunctive subformulas
lola: state equation: write sara problem file to RobotManipulation-PT-01000-ReachabilityFireability-11.sara
lola: state equation: calling and running sara
sara: try reading problem file RobotManipulation-PT-01000-ReachabilityFireability-11.sara.
lola: SUBRESULT
lola: result: no
lola: produced by: state space
lola: The predicate is not invariant.
lola: 2002 markings, 2001 edges
lola: subprocess 12 will run for 884 seconds at most (--localtimelimit=-1)
lola: ========================================
lola: ...considering subproblem: A (G (((NOT FIREABLE(p_start) AND NOT FIREABLE(p_sop) AND FIREABLE(r_stops)) OR FIREABLE(p_start))))
lola: ========================================
lola: SUBTASK
lola: checking invariance
lola: Planning: workflow for reachability check: stateequation||search (--findpath=off)
lola: STORE
lola: using a bit-perfect encoder (--encoder=bit)
lola: using 36 bytes per marking, with 0 unused bits
lola: using a prefix tree store (--store=prefix)
lola: SEARCH (state space)
lola: state space: using reachability graph (--search=depth)
lola: state space: using reachability preserving stubborn set method with insertion algorithm (--stubborn=tarjan)
lola: RUNNING
lola: lola: ========================================
state equation: Generated DNF with 6 literals and 3 conjunctive subformulas
lola: state equation: write sara problem file to RobotManipulation-PT-01000-ReachabilityFireability-12.sara
lola: state equation: calling and running sara
sara: try reading problem file RobotManipulation-PT-01000-ReachabilityFireability-12.sara.
lola: SUBRESULT
lola: result: no
lola: produced by: state space
lola: The predicate is not invariant.
lola: 2002 markings, 2001 edges
lola: ========================================
lola: subprocess 13 will run for 1179 seconds at most (--localtimelimit=-1)
lola: ========================================
lola: ...considering subproblem: A (G (((FIREABLE(r_end_move) AND FIREABLE(p_relSC) AND (FIREABLE(r_starts) OR FIREABLE(p_start)) AND (FIREABLE(r_begin_move) OR (FIREABLE(r_begin_move) AND FIREABLE(r_starts)))) OR FIREABLE(p_start))))
lola: ========================================
lola: SUBTASK
lola: checking invariance
lola: Planning: workflow for reachability check: stateequation||search (--findpath=off)
lola: STORE
lola: using a bit-perfect encoder (--encoder=bit)
lola: using 36 bytes per marking, with 0 unused bits
lola: using a prefix tree store (--store=prefix)
lola: SEARCH (state space)
lola: state space: using reachability graph (--search=depth)
lola: state space: using reachability preserving stubborn set method with insertion algorithm (--stubborn=tarjan)
lola: RUNNING
lola: state equation: Generated DNF with 34 literals and 12 conjunctive subformulas
lola: state equation: write sara problem file to RobotManipulation-PT-01000-ReachabilityFireability-13.sara
lola: state equation: calling and running sara
lola: SUBRESULT
lola: result: no
lola: produced by: state space
lola: The predicate is not invariant.
lola: 2002 markings, 2001 edges
lola: subprocess 14 will run for 1769 seconds at most (--localtimelimit=-1)
lola: ========================================
lola: ...considering subproblem: A (G ((NOT FIREABLE(p_relSC) OR NOT FIREABLE(r_end_move) OR NOT FIREABLE(r_begin_move) OR (FIREABLE(p_relSC) AND FIREABLE(r_end_move)))))
lola: ========================================
lola: SUBTASK
lola: checking invariance
lola: Planning: workflow for reachability check: stateequation||search (--findpath=off)
lola: STORE
lola: using a bit-perfect encoder (--encoder=bit)
lola: using 36 bytes per marking, with 0 unused bits
lola: using a prefix tree store (--store=prefix)
lola: SEARCH (state space)
lola: state space: using reachability graph (--search=depth)
lola: state space: using reachability preserving stubborn set method with insertion algorithm (--stubborn=tarjan)
lola: RUNNING
lola: ========================================
lola: state equation: State predicate is contradiction.
lola: SUBRESULT
lola: result: yes
lola: produced by: state equation
lola: The predicate is invariant.
lola: ========================================
lola: subprocess 15 will run for 3539 seconds at most (--localtimelimit=-1)
lola: ========================================
lola: ...considering subproblem: E (F (()))
lola: ========================================
lola: SUBTASK
lola: checking initial satisfaction
lola: processed formula: FALSE
lola: processed formula length: 5
lola: 3 rewrites
lola: formula mentions 0 of 15 places; total mentions: 0
lola: closed formula file RobotManipulation-PT-01000-ReachabilityFireability.task
lola: processed formula with 0 atomic propositions
lola: RUNNING
lola: SUBRESULT
lola: result: no
lola: produced by: preprocessing
lola: The net violates the given property already in its initial state.
lola: 0 markings, 0 edges
lola: ========================================
lola: RESULT
lola:
SUMMARY: no no no no yes yes yes no no no yes no no no yes no
FORMULA RobotManipulation-PT-01000-ReachabilityFireability-0 FALSE TECHNIQUES COLLATERAL_PROCESSING EXPLICIT STATE_COMPRESSION STUBBORN_SETS TOPOLOGICAL USE_NUPN
FORMULA RobotManipulation-PT-01000-ReachabilityFireability-1 FALSE TECHNIQUES COLLATERAL_PROCESSING EXPLICIT STATE_COMPRESSION STUBBORN_SETS TOPOLOGICAL USE_NUPN
FORMULA RobotManipulation-PT-01000-ReachabilityFireability-2 FALSE TECHNIQUES COLLATERAL_PROCESSING EXPLICIT STATE_COMPRESSION STUBBORN_SETS TOPOLOGICAL USE_NUPN
FORMULA RobotManipulation-PT-01000-ReachabilityFireability-3 FALSE TECHNIQUES COLLATERAL_PROCESSING EXPLICIT STATE_COMPRESSION STUBBORN_SETS TOPOLOGICAL USE_NUPN
FORMULA RobotManipulation-PT-01000-ReachabilityFireability-4 TRUE TECHNIQUES COLLATERAL_PROCESSING EXPLICIT STATE_COMPRESSION STUBBORN_SETS TOPOLOGICAL USE_NUPN
FORMULA RobotManipulation-PT-01000-ReachabilityFireability-5 TRUE TECHNIQUES COLLATERAL_PROCESSING EXPLICIT STATE_COMPRESSION STUBBORN_SETS TOPOLOGICAL USE_NUPN
FORMULA RobotManipulation-PT-01000-ReachabilityFireability-6 TRUE TECHNIQUES COLLATERAL_PROCESSING EXPLICIT STATE_COMPRESSION STUBBORN_SETS TOPOLOGICAL USE_NUPN
----- Kill lola and sara stderr -----
FORMULA RobotManipulation-PT-01000-ReachabilityFireability-7 FALSE TECHNIQUES COLLATERAL_PROCESSING EXPLICIT STATE_COMPRESSION STUBBORN_SETS TOPOLOGICAL USE_NUPN
FORMULA RobotManipulation-PT-01000-ReachabilityFireability-8 FALSE TECHNIQUES COLLATERAL_PROCESSING EXPLICIT STATE_COMPRESSION STUBBORN_SETS TOPOLOGICAL USE_NUPN
FORMULA RobotManipulation-PT-01000-ReachabilityFireability-9 FALSE TECHNIQUES COLLATERAL_PROCESSING EXPLICIT STATE_COMPRESSION STUBBORN_SETS TOPOLOGICAL USE_NUPN
FORMULA RobotManipulation-PT-01000-ReachabilityFireability-10 TRUE TECHNIQUES COLLATERAL_PROCESSING EXPLICIT STATE_COMPRESSION STUBBORN_SETS TOPOLOGICAL USE_NUPN
FORMULA RobotManipulation-PT-01000-ReachabilityFireability-11 FALSE TECHNIQUES COLLATERAL_PROCESSING EXPLICIT STATE_COMPRESSION STUBBORN_SETS TOPOLOGICAL USE_NUPN
FORMULA RobotManipulation-PT-01000-ReachabilityFireability-12 FALSE TECHNIQUES COLLATERAL_PROCESSING EXPLICIT STATE_COMPRESSION STUBBORN_SETS TOPOLOGICAL USE_NUPN
FORMULA RobotManipulation-PT-01000-ReachabilityFireability-13 FALSE TECHNIQUES COLLATERAL_PROCESSING EXPLICIT STATE_COMPRESSION STUBBORN_SETS TOPOLOGICAL USE_NUPN
FORMULA RobotManipulation-PT-01000-ReachabilityFireability-14 TRUE TECHNIQUES COLLATERAL_PROCESSING EXPLICIT STATE_COMPRESSION STUBBORN_SETS TOPOLOGICAL USE_NUPN
FORMULA RobotManipulation-PT-01000-ReachabilityFireability-15 FALSE TECHNIQUES COLLATERAL_PROCESSING EXPLICIT STATE_COMPRESSION STUBBORN_SETS TOPOLOGICAL USE_NUPN
----- Kill lola and sara stdout -----
----- Finished stderr -----
----- Finished stdout -----
Sequence of Actions to be Executed by the VM
This is useful if one wants to reexecute the tool in the VM from the submitted image disk.
set -x
# this is for BenchKit: configuration of major elements for the test
export BK_INPUT="RobotManipulation-PT-01000"
export BK_EXAMINATION="ReachabilityFireability"
export BK_TOOL="mcc4mcc-full"
export BK_RESULT_DIR="/tmp/BK_RESULTS/OUTPUTS"
export BK_TIME_CONFINEMENT="3600"
export BK_MEMORY_CONFINEMENT="16384"
# this is specific to your benchmark or test
export BIN_DIR="$HOME/BenchKit/bin"
# remove the execution directoty if it exists (to avoid increse of .vmdk images)
if [ -d execution ] ; then
rm -rf execution
fi
tar xzf /home/mcc/BenchKit/INPUTS/RobotManipulation-PT-01000.tgz
mv RobotManipulation-PT-01000 execution
cd execution
pwd
ls -lh
# this is for BenchKit: explicit launching of the test
echo "====================================================================="
echo " Generated by BenchKit 2-3637"
echo " Executing tool mcc4mcc-full"
echo " Input is RobotManipulation-PT-01000, examination is ReachabilityFireability"
echo " Time confinement is $BK_TIME_CONFINEMENT seconds"
echo " Memory confinement is 16384 MBytes"
echo " Number of cores is 4"
echo " Run identifier is r154-smll-152685551600070"
echo "====================================================================="
echo
echo "--------------------"
echo "content from stdout:"
echo
echo "=== Data for post analysis generated by BenchKit (invocation template)"
echo
if [ "ReachabilityFireability" = "UpperBounds" ] ; then
echo "The expected result is a vector of positive values"
echo NUM_VECTOR
elif [ "ReachabilityFireability" != "StateSpace" ] ; then
echo "The expected result is a vector of booleans"
echo BOOL_VECTOR
else
echo "no data necessary for post analysis"
fi
echo
if [ -f "ReachabilityFireability.txt" ] ; then
echo "here is the order used to build the result vector(from text file)"
for x in $(grep Property ReachabilityFireability.txt | cut -d ' ' -f 2 | sort -u) ; do
echo "FORMULA_NAME $x"
done
elif [ -f "ReachabilityFireability.xml" ] ; then # for cunf (txt files deleted;-)
echo echo "here is the order used to build the result vector(from xml file)"
for x in $(grep '
echo "FORMULA_NAME $x"
done
fi
echo
echo "=== Now, execution of the tool begins"
echo
echo -n "BK_START "
date -u +%s%3N
echo
timeout -s 9 $BK_TIME_CONFINEMENT bash -c "/home/mcc/BenchKit/BenchKit_head.sh 2> STDERR ; echo ; echo -n \"BK_STOP \" ; date -u +%s%3N"
if [ $? -eq 137 ] ; then
echo
echo "BK_TIME_CONFINEMENT_REACHED"
fi
echo
echo "--------------------"
echo "content from stderr:"
echo
cat STDERR ;