
About the Execution of M4M.struct for RobotManipulation-PT-00002
| Execution Summary | |||||
| Max Memory Used (MB) |
Time wait (ms) | CPU Usage (ms) | I/O Wait (ms) | Computed Result | Execution Status |
| 642.360 | 13604.00 | 22700.00 | 923.70 | TFFTFTTFTFFTTTTT | normal |
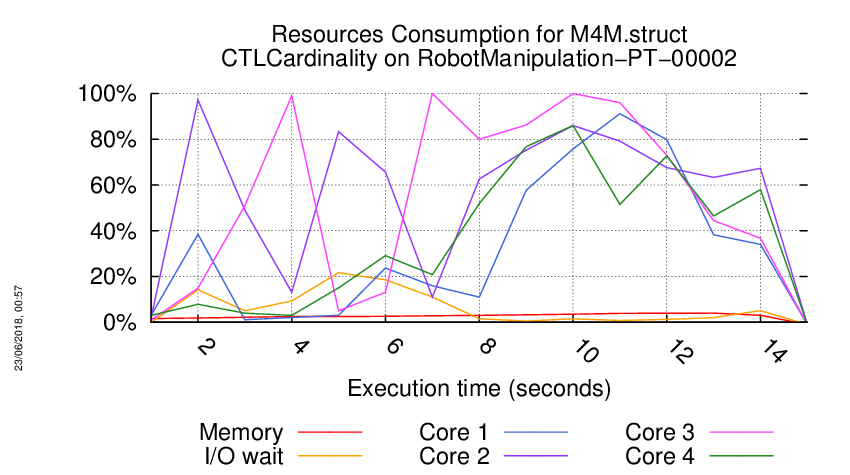
Execution Chart
We display below the execution chart for this examination (boot time has been removed).
Trace from the execution
Waiting for the VM to be ready (probing ssh)
......................
/home/mcc/execution
total 172K
-rw-r--r-- 1 mcc users 3.7K May 15 18:54 CTLCardinality.txt
-rw-r--r-- 1 mcc users 18K May 15 18:54 CTLCardinality.xml
-rw-r--r-- 1 mcc users 2.4K May 15 18:54 CTLFireability.txt
-rw-r--r-- 1 mcc users 12K May 15 18:54 CTLFireability.xml
-rw-r--r-- 1 mcc users 4.0K May 15 18:50 GenericPropertiesDefinition.xml
-rw-r--r-- 1 mcc users 6.2K May 15 18:50 GenericPropertiesVerdict.xml
-rw-r--r-- 1 mcc users 2.4K May 15 18:54 LTLCardinality.txt
-rw-r--r-- 1 mcc users 8.9K May 15 18:54 LTLCardinality.xml
-rw-r--r-- 1 mcc users 2.0K May 15 18:54 LTLFireability.txt
-rw-r--r-- 1 mcc users 8.3K May 15 18:54 LTLFireability.xml
-rw-r--r-- 1 mcc users 4.5K May 15 18:54 ReachabilityCardinality.txt
-rw-r--r-- 1 mcc users 23K May 15 18:54 ReachabilityCardinality.xml
-rw-r--r-- 1 mcc users 117 May 15 18:54 ReachabilityDeadlock.txt
-rw-r--r-- 1 mcc users 355 May 15 18:54 ReachabilityDeadlock.xml
-rw-r--r-- 1 mcc users 2.8K May 15 18:54 ReachabilityFireability.txt
-rw-r--r-- 1 mcc users 14K May 15 18:54 ReachabilityFireability.xml
-rw-r--r-- 1 mcc users 1.8K May 15 18:54 UpperBounds.txt
-rw-r--r-- 1 mcc users 3.8K May 15 18:54 UpperBounds.xml
-rw-r--r-- 1 mcc users 6 May 15 18:50 equiv_col
-rw-r--r-- 1 mcc users 6 May 15 18:50 instance
-rw-r--r-- 1 mcc users 6 May 15 18:50 iscolored
-rw-r--r-- 1 mcc users 6.3K May 15 18:50 model.pnml
=====================================================================
Generated by BenchKit 2-3637
Executing tool mcc4mcc-structural
Input is RobotManipulation-PT-00002, examination is CTLCardinality
Time confinement is 3600 seconds
Memory confinement is 16384 MBytes
Number of cores is 4
Run identifier is r155-smll-152685552800010
=====================================================================
--------------------
content from stdout:
=== Data for post analysis generated by BenchKit (invocation template)
The expected result is a vector of booleans
BOOL_VECTOR
here is the order used to build the result vector(from text file)
FORMULA_NAME RobotManipulation-PT-00002-CTLCardinality-00
FORMULA_NAME RobotManipulation-PT-00002-CTLCardinality-01
FORMULA_NAME RobotManipulation-PT-00002-CTLCardinality-02
FORMULA_NAME RobotManipulation-PT-00002-CTLCardinality-03
FORMULA_NAME RobotManipulation-PT-00002-CTLCardinality-04
FORMULA_NAME RobotManipulation-PT-00002-CTLCardinality-05
FORMULA_NAME RobotManipulation-PT-00002-CTLCardinality-06
FORMULA_NAME RobotManipulation-PT-00002-CTLCardinality-07
FORMULA_NAME RobotManipulation-PT-00002-CTLCardinality-08
FORMULA_NAME RobotManipulation-PT-00002-CTLCardinality-09
FORMULA_NAME RobotManipulation-PT-00002-CTLCardinality-10
FORMULA_NAME RobotManipulation-PT-00002-CTLCardinality-11
FORMULA_NAME RobotManipulation-PT-00002-CTLCardinality-12
FORMULA_NAME RobotManipulation-PT-00002-CTLCardinality-13
FORMULA_NAME RobotManipulation-PT-00002-CTLCardinality-14
FORMULA_NAME RobotManipulation-PT-00002-CTLCardinality-15
=== Now, execution of the tool begins
BK_START 1526940723374
BK_STOP 1526940736978
--------------------
content from stderr:
Prefix is 75f5f979.
Reading known information in /usr/share/mcc4mcc/75f5f979-known.json.
Reading learned information in /usr/share/mcc4mcc/75f5f979-learned.json.
Reading value translations in /usr/share/mcc4mcc/75f5f979-values.json.
Using directory /home/mcc/execution for input, as it contains a model.pnml file.
Using RobotManipulation-PT-00002 as instance name.
Using RobotManipulation as model name.
Using algorithm or tool bmdt.
Model characteristics are: {'Examination': 'CTLCardinality', 'Place/Transition': True, 'Colored': False, 'Relative-Time': 1, 'Relative-Memory': 1, 'Ordinary': True, 'Simple Free Choice': False, 'Extended Free Choice': False, 'State Machine': False, 'Marked Graph': False, 'Connected': True, 'Strongly Connected': True, 'Source Place': False, 'Sink Place': False, 'Source Transition': False, 'Sink Transition': False, 'Loop Free': True, 'Conservative': False, 'Sub-Conservative': False, 'Nested Units': False, 'Safe': False, 'Deadlock': False, 'Reversible': True, 'Quasi Live': True, 'Live': True}.
Known tools are: [{'Time': 228, 'Memory': 106.67, 'Tool': 'lola'}, {'Time': 2455, 'Memory': 152.67, 'Tool': 'gspn'}, {'Time': 2580, 'Memory': 211.81, 'Tool': 'itstools'}, {'Time': 7216, 'Memory': 7483.18, 'Tool': 'marcie'}].
Learned tools are: [{'Tool': 'itstools'}].
Learned tool itstools is 11.31578947368421x far from the best tool lola.
CTLCardinality itstools RobotManipulation-PT-00002...
May 21, 2018 10:12:14 PM fr.lip6.move.gal.application.Application start
INFO: Running its-tools with arguments : [-z3path, /usr/bin/z3, -yices2path, /usr/bin/yices, -ltsminpath, /usr/bin, -smt, -its, -pnfolder, /mcc-data, -examination, CTLCardinality]
May 21, 2018 10:12:14 PM fr.lip6.move.gal.application.MccTranslator transformPNML
INFO: Parsing pnml file : /mcc-data/model.pnml
May 21, 2018 10:12:14 PM fr.lip6.move.gal.nupn.PTNetReader loadFromXML
INFO: Load time of PNML (sax parser for PT used): 50 ms
May 21, 2018 10:12:14 PM fr.lip6.move.gal.pnml.togal.PTGALTransformer handlePage
INFO: Transformed 15 places.
May 21, 2018 10:12:15 PM fr.lip6.move.gal.pnml.togal.PTGALTransformer handlePage
INFO: Transformed 11 transitions.
May 21, 2018 10:12:15 PM fr.lip6.move.serialization.SerializationUtil systemToFile
INFO: Time to serialize gal into /mcc-data/model.pnml.img.gal : 11 ms
May 21, 2018 10:12:15 PM fr.lip6.move.gal.instantiate.GALRewriter flatten
INFO: Flatten gal took : 66 ms
May 21, 2018 10:12:15 PM fr.lip6.move.serialization.SerializationUtil systemToFile
INFO: Time to serialize gal into /mcc-data/CTLCardinality.pnml.gal : 1 ms
May 21, 2018 10:12:15 PM fr.lip6.move.serialization.SerializationUtil serializePropertiesForITSCTLTools
INFO: Time to serialize properties into /mcc-data/CTLCardinality.ctl : 8 ms
Invoking ITS tools like this :CommandLine [args=[/usr/share/itscl/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.201804131302/bin/its-ctl-linux64, --gc-threshold, 2000000, --quiet, -i, /mcc-data/CTLCardinality.pnml.gal, -t, CGAL, -ctl, /mcc-data/CTLCardinality.ctl], workingDir=/mcc-data]
its-ctl command run as :
/usr/share/itscl/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.201804131302/bin/its-ctl-linux64 --gc-threshold 2000000 --quiet -i /mcc-data/CTLCardinality.pnml.gal -t CGAL -ctl /mcc-data/CTLCardinality.ctl
No direction supplied, using forward translation only.
Parsed 16 CTL formulae.
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
reachable,1430,0.021382,4812,2,218,5,1959,6,0,74,1848,0
Converting to forward existential form...Done !
original formula: ((move<=initialized) * EX(EF((r_moving>=3))))
=> equivalent forward existential formula: [(FwdU(EY((Init * (move<=initialized))),TRUE) * (r_moving>=3))] != FALSE
(forward)formula 0,1,0.033515,5248,1,0,8,1982,10,1,193,1854,5
FORMULA RobotManipulation-PT-00002-CTLCardinality-00 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: AG(((p_m>=3)&&((!(p_sc>=1))&&(moved>=3))))
=> equivalent forward existential formula: [(FwdU(Init,TRUE) * !(((p_m>=3)&&((!(p_sc>=1))&&(moved>=3)))))] = FALSE
(forward)formula 1,0,0.035235,5248,1,0,11,2028,12,3,202,1902,6
FORMULA RobotManipulation-PT-00002-CTLCardinality-01 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is FALSE !
***************************************
original formula: (move>=3)
=> equivalent forward existential formula: [(Init * (move>=3))] != FALSE
(forward)formula 2,0,0.035845,5512,1,0,12,2032,13,3,203,1902,7
FORMULA RobotManipulation-PT-00002-CTLCardinality-02 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is FALSE !
***************************************
original formula: !(((EX((r_moving<=r_stopped)) * EG((move<=r_stopped))) * ((initialize>=1)||(p_sc>=1))))
=> equivalent forward existential formula: (([(Init * !(EX((r_moving<=r_stopped))))] != FALSE + [(Init * !(EG((move<=r_stopped))))] != FALSE) + [(Init * !(((initialize>=1)||(p_sc>=1))))] != FALSE)
Reverse transition relation is exact ! Faster fixpoint algorithm enabled.
(forward)formula 3,1,0.059894,5776,1,0,18,4194,27,7,430,3884,16
FORMULA RobotManipulation-PT-00002-CTLCardinality-03 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: (move>=1)
=> equivalent forward existential formula: [(Init * (move>=1))] != FALSE
(forward)formula 4,0,0.060323,5776,1,0,19,4195,28,7,430,3884,17
FORMULA RobotManipulation-PT-00002-CTLCardinality-04 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is FALSE !
***************************************
original formula: EF((off<=p_m))
=> equivalent forward existential formula: [(FwdU(Init,TRUE) * (off<=p_m))] != FALSE
(forward)formula 5,1,0.061228,5776,1,0,20,4222,29,8,438,3925,18
FORMULA RobotManipulation-PT-00002-CTLCardinality-05 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: AF(((((r_active<=access)||(r_active>=1))||(!(r_stopped<=p_m)))||((p_i2<=initialized)&&(r_moving>=2))))
=> equivalent forward existential formula: [FwdG(Init,!(((((r_active<=access)||(r_active>=1))||(!(r_stopped<=p_m)))||((p_i2<=initialized)&&(r_moving>=2)))))] = FALSE
(forward)formula 6,1,0.0632,5776,1,0,20,4235,37,8,465,3937,19
FORMULA RobotManipulation-PT-00002-CTLCardinality-06 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: AG(!(EF((p_i1>=3))))
=> equivalent forward existential formula: [(FwdU(FwdU(Init,TRUE),TRUE) * (p_i1>=3))] = FALSE
(forward)formula 7,0,0.064411,5776,1,0,21,4330,38,9,466,4035,22
FORMULA RobotManipulation-PT-00002-CTLCardinality-07 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is FALSE !
***************************************
original formula: (EX((((p_rel<=p_m)||(initialized<=r_stopped))&&(!(access<=p_rel)))) + (!(AX((r_stopped>=3))) + (r_stopped<=initialized)))
=> equivalent forward existential formula: ([(EY(Init) * (((p_rel<=p_m)||(initialized<=r_stopped))&&(!(access<=p_rel))))] != FALSE + ([(EY(Init) * !((r_stopped>=3)))] != FALSE + [(Init * (r_stopped<=initialized))] != FALSE))
(forward)formula 8,1,0.067541,6040,1,0,22,4465,39,10,498,4170,23
FORMULA RobotManipulation-PT-00002-CTLCardinality-08 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: AF(AG((p_i2<=moved)))
=> equivalent forward existential formula: [FwdG(Init,!(!(E(TRUE U !((p_i2<=moved))))))] = FALSE
(forward)formula 9,0,0.077231,6040,1,0,23,4987,45,11,528,4743,29
FORMULA RobotManipulation-PT-00002-CTLCardinality-09 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is FALSE !
***************************************
original formula: !(AF(((off<=p_m)&&((p_rel>=3)||(r_active<=p_rdy)))))
=> equivalent forward existential formula: [FwdG(Init,!(((off<=p_m)&&((p_rel>=3)||(r_active<=p_rdy)))))] != FALSE
(forward)formula 10,0,0.079249,6040,1,0,24,5145,52,12,547,4897,30
FORMULA RobotManipulation-PT-00002-CTLCardinality-10 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is FALSE !
***************************************
original formula: (EF(EG((off>=2))) * (EF((r_active<=p_i1)) * ((p_i2>=1)||(access>=3))))
=> equivalent forward existential formula: [(FwdU(((Init * E(TRUE U EG((off>=2)))) * ((p_i2>=1)||(access>=3))),TRUE) * (r_active<=p_i1))] != FALSE
(forward)formula 11,1,0.089898,6040,1,0,27,6202,61,14,561,5905,36
FORMULA RobotManipulation-PT-00002-CTLCardinality-11 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: !((((!((p_rel<=move)&&(p_m<=initialize)))&&((p_i1<=p_rel)&&(!(moved>=2)))) * AF(((r_active<=p_i1)&&(initialized>=3)))))
=> equivalent forward existential formula: ([(Init * !(((!((p_rel<=move)&&(p_m<=initialize)))&&((p_i1<=p_rel)&&(!(moved>=2))))))] != FALSE + [FwdG(Init,!(((r_active<=p_i1)&&(initialized>=3))))] != FALSE)
(forward)formula 12,1,0.091687,6040,1,0,27,6202,63,14,580,5905,37
FORMULA RobotManipulation-PT-00002-CTLCardinality-12 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: (E(((moved<=initialized)&&(p_sc<=r_moving)) U !((initialize<=r_stopped))) + A(((p_rdy<=p_i1)&&(r_stopped>=1)) U ((p_m<=r_stopped)&&(moved>=3))))
=> equivalent forward existential formula: ([(FwdU(Init,((moved<=initialized)&&(p_sc<=r_moving))) * !((initialize<=r_stopped)))] != FALSE + [((Init * !(EG(!(((p_m<=r_stopped)&&(moved>=3)))))) * !(E(!(((p_m<=r_stopped)&&(moved>=3))) U (!(((p_rdy<=p_i1)&&(r_stopped>=1))) * !(((p_m<=r_stopped)&&(moved>=3)))))))] != FALSE)
Hit Full ! (commute/partial/dont) 4/3/7
(forward)formula 13,1,0.103554,6040,1,0,33,7124,72,16,640,7137,41
FORMULA RobotManipulation-PT-00002-CTLCardinality-13 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: AX((moved<=p_i2))
=> equivalent forward existential formula: [(EY(Init) * !((moved<=p_i2)))] = FALSE
(forward)formula 14,1,0.105347,6304,1,0,36,7188,74,18,650,7457,42
FORMULA RobotManipulation-PT-00002-CTLCardinality-14 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: (p_m<=r_stopped)
=> equivalent forward existential formula: [(Init * (p_m<=r_stopped))] != FALSE
(forward)formula 15,1,0.105939,6304,1,0,36,7188,75,18,652,7458,43
FORMULA RobotManipulation-PT-00002-CTLCardinality-15 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
Sequence of Actions to be Executed by the VM
This is useful if one wants to reexecute the tool in the VM from the submitted image disk.
set -x
# this is for BenchKit: configuration of major elements for the test
export BK_INPUT="RobotManipulation-PT-00002"
export BK_EXAMINATION="CTLCardinality"
export BK_TOOL="mcc4mcc-structural"
export BK_RESULT_DIR="/tmp/BK_RESULTS/OUTPUTS"
export BK_TIME_CONFINEMENT="3600"
export BK_MEMORY_CONFINEMENT="16384"
# this is specific to your benchmark or test
export BIN_DIR="$HOME/BenchKit/bin"
# remove the execution directoty if it exists (to avoid increse of .vmdk images)
if [ -d execution ] ; then
rm -rf execution
fi
tar xzf /home/mcc/BenchKit/INPUTS/RobotManipulation-PT-00002.tgz
mv RobotManipulation-PT-00002 execution
cd execution
pwd
ls -lh
# this is for BenchKit: explicit launching of the test
echo "====================================================================="
echo " Generated by BenchKit 2-3637"
echo " Executing tool mcc4mcc-structural"
echo " Input is RobotManipulation-PT-00002, examination is CTLCardinality"
echo " Time confinement is $BK_TIME_CONFINEMENT seconds"
echo " Memory confinement is 16384 MBytes"
echo " Number of cores is 4"
echo " Run identifier is r155-smll-152685552800010"
echo "====================================================================="
echo
echo "--------------------"
echo "content from stdout:"
echo
echo "=== Data for post analysis generated by BenchKit (invocation template)"
echo
if [ "CTLCardinality" = "UpperBounds" ] ; then
echo "The expected result is a vector of positive values"
echo NUM_VECTOR
elif [ "CTLCardinality" != "StateSpace" ] ; then
echo "The expected result is a vector of booleans"
echo BOOL_VECTOR
else
echo "no data necessary for post analysis"
fi
echo
if [ -f "CTLCardinality.txt" ] ; then
echo "here is the order used to build the result vector(from text file)"
for x in $(grep Property CTLCardinality.txt | cut -d ' ' -f 2 | sort -u) ; do
echo "FORMULA_NAME $x"
done
elif [ -f "CTLCardinality.xml" ] ; then # for cunf (txt files deleted;-)
echo echo "here is the order used to build the result vector(from xml file)"
for x in $(grep '
echo "FORMULA_NAME $x"
done
fi
echo
echo "=== Now, execution of the tool begins"
echo
echo -n "BK_START "
date -u +%s%3N
echo
timeout -s 9 $BK_TIME_CONFINEMENT bash -c "/home/mcc/BenchKit/BenchKit_head.sh 2> STDERR ; echo ; echo -n \"BK_STOP \" ; date -u +%s%3N"
if [ $? -eq 137 ] ; then
echo
echo "BK_TIME_CONFINEMENT_REACHED"
fi
echo
echo "--------------------"
echo "content from stderr:"
echo
cat STDERR ;