
About the Execution of ITS-Tools.L for RobotManipulation-PT-00002
| Execution Summary | |||||
| Max Memory Used (MB) |
Time wait (ms) | CPU Usage (ms) | I/O Wait (ms) | Computed Result | Execution Status |
| 15752.070 | 4630.00 | 7314.00 | 269.90 | FFTTFTTFFFTFTTFF | normal |
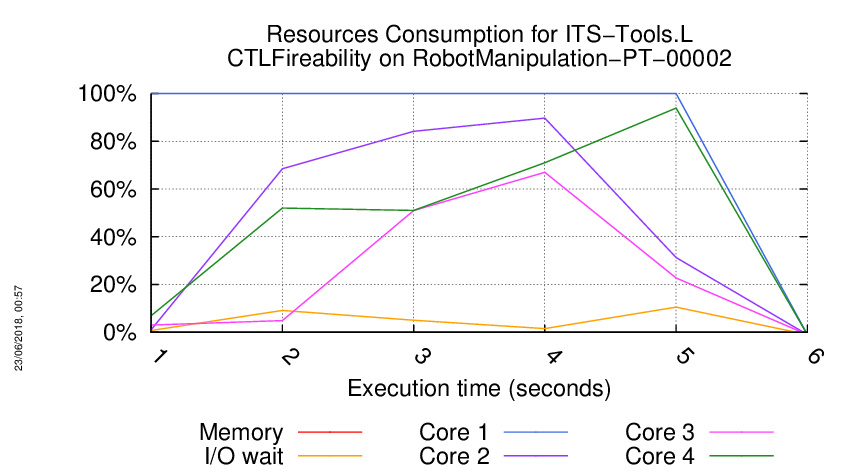
Execution Chart
We display below the execution chart for this examination (boot time has been removed).
Trace from the execution
Waiting for the VM to be ready (probing ssh)
.....................
/home/mcc/execution
total 172K
-rw-r--r-- 1 mcc users 3.7K May 15 18:54 CTLCardinality.txt
-rw-r--r-- 1 mcc users 18K May 15 18:54 CTLCardinality.xml
-rw-r--r-- 1 mcc users 2.4K May 15 18:54 CTLFireability.txt
-rw-r--r-- 1 mcc users 12K May 15 18:54 CTLFireability.xml
-rw-r--r-- 1 mcc users 4.0K May 15 18:50 GenericPropertiesDefinition.xml
-rw-r--r-- 1 mcc users 6.2K May 15 18:50 GenericPropertiesVerdict.xml
-rw-r--r-- 1 mcc users 2.4K May 15 18:54 LTLCardinality.txt
-rw-r--r-- 1 mcc users 8.9K May 15 18:54 LTLCardinality.xml
-rw-r--r-- 1 mcc users 2.0K May 15 18:54 LTLFireability.txt
-rw-r--r-- 1 mcc users 8.3K May 15 18:54 LTLFireability.xml
-rw-r--r-- 1 mcc users 4.5K May 15 18:54 ReachabilityCardinality.txt
-rw-r--r-- 1 mcc users 23K May 15 18:54 ReachabilityCardinality.xml
-rw-r--r-- 1 mcc users 117 May 15 18:54 ReachabilityDeadlock.txt
-rw-r--r-- 1 mcc users 355 May 15 18:54 ReachabilityDeadlock.xml
-rw-r--r-- 1 mcc users 2.8K May 15 18:54 ReachabilityFireability.txt
-rw-r--r-- 1 mcc users 14K May 15 18:54 ReachabilityFireability.xml
-rw-r--r-- 1 mcc users 1.8K May 15 18:54 UpperBounds.txt
-rw-r--r-- 1 mcc users 3.8K May 15 18:54 UpperBounds.xml
-rw-r--r-- 1 mcc users 6 May 15 18:50 equiv_col
-rw-r--r-- 1 mcc users 6 May 15 18:50 instance
-rw-r--r-- 1 mcc users 6 May 15 18:50 iscolored
-rw-r--r-- 1 mcc users 6.3K May 15 18:50 model.pnml
=====================================================================
Generated by BenchKit 2-3637
Executing tool itstoolsl
Input is RobotManipulation-PT-00002, examination is CTLFireability
Time confinement is 3600 seconds
Memory confinement is 16384 MBytes
Number of cores is 4
Run identifier is r153-smll-152685550900011
=====================================================================
--------------------
content from stdout:
=== Data for post analysis generated by BenchKit (invocation template)
The expected result is a vector of booleans
BOOL_VECTOR
here is the order used to build the result vector(from text file)
FORMULA_NAME RobotManipulation-PT-00002-CTLFireability-00
FORMULA_NAME RobotManipulation-PT-00002-CTLFireability-01
FORMULA_NAME RobotManipulation-PT-00002-CTLFireability-02
FORMULA_NAME RobotManipulation-PT-00002-CTLFireability-03
FORMULA_NAME RobotManipulation-PT-00002-CTLFireability-04
FORMULA_NAME RobotManipulation-PT-00002-CTLFireability-05
FORMULA_NAME RobotManipulation-PT-00002-CTLFireability-06
FORMULA_NAME RobotManipulation-PT-00002-CTLFireability-07
FORMULA_NAME RobotManipulation-PT-00002-CTLFireability-08
FORMULA_NAME RobotManipulation-PT-00002-CTLFireability-09
FORMULA_NAME RobotManipulation-PT-00002-CTLFireability-10
FORMULA_NAME RobotManipulation-PT-00002-CTLFireability-11
FORMULA_NAME RobotManipulation-PT-00002-CTLFireability-12
FORMULA_NAME RobotManipulation-PT-00002-CTLFireability-13
FORMULA_NAME RobotManipulation-PT-00002-CTLFireability-14
FORMULA_NAME RobotManipulation-PT-00002-CTLFireability-15
=== Now, execution of the tool begins
BK_START 1527290543279
Converted graph to binary with : CommandLine [args=[/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.louvain.binaries_1.0.0.201805241334/bin/convert-linux64, -i, /tmp/graph5804588774345664684.txt, -o, /tmp/graph5804588774345664684.bin, -w, /tmp/graph5804588774345664684.weights], workingDir=null]
Built communities with : CommandLine [args=[/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.louvain.binaries_1.0.0.201805241334/bin/louvain-linux64, /tmp/graph5804588774345664684.bin, -l, -1, -v, -w, /tmp/graph5804588774345664684.weights, -q, 0, -e, 0.001], workingDir=null]
Invoking ITS tools like this :CommandLine [args=[/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.201805241334/bin/its-ctl-linux64, --gc-threshold, 2000000, --quiet, -i, /home/mcc/execution/CTLFireability.pnml.gal, -t, CGAL, -ctl, /home/mcc/execution/CTLFireability.ctl], workingDir=/home/mcc/execution]
its-ctl command run as :
/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.201805241334/bin/its-ctl-linux64 --gc-threshold 2000000 --quiet -i /home/mcc/execution/CTLFireability.pnml.gal -t CGAL -ctl /home/mcc/execution/CTLFireability.ctl
No direction supplied, using forward translation only.
Parsed 16 CTL formulae.
built 5 ordering constraints for composite.
built 6 ordering constraints for composite.
built 5 ordering constraints for composite.
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
reachable,1430,0.023551,5260,172,92,1326,417,71,1335,21,1213,0
Converting to forward existential form...Done !
original formula: (u3.r_moving>=1)
=> equivalent forward existential formula: [(Init * (u3.r_moving>=1))] != FALSE
(forward)formula 0,0,0.024101,5640,1,0,1326,417,74,1335,23,1213,2
FORMULA RobotManipulation-PT-00002-CTLFireability-00 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL USE_NUPN
Formula is FALSE !
***************************************
original formula: EG(AX((i2.u4.p_sc>=1)))
=> equivalent forward existential formula: [FwdG(Init,!(EX(!((i2.u4.p_sc>=1)))))] != FALSE
Reverse transition relation is exact ! Faster fixpoint algorithm enabled.
(forward)formula 1,0,0.109946,8600,1,0,6965,1898,192,14144,104,8068,7323
FORMULA RobotManipulation-PT-00002-CTLFireability-01 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL USE_NUPN
Formula is FALSE !
***************************************
original formula: !(((i2.u4.p_m>=1)&&(i2.u1.moved>=1)))
=> equivalent forward existential formula: [(Init * !(((i2.u4.p_m>=1)&&(i2.u1.moved>=1))))] != FALSE
(forward)formula 2,1,0.110488,9128,1,0,6966,1898,203,14144,104,8068,7329
FORMULA RobotManipulation-PT-00002-CTLFireability-02 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL USE_NUPN
Formula is TRUE !
***************************************
original formula: !((((u3.r_stopped>=1)&&(i0.u0.initialize>=1)) * AG((((i2.u4.p_sc>=1)&&((i2.u4.move>=1)&&(u3.r_active>=1)))&&(((i0.u0.p_i2>=1)&&(i0.u2.initialized>=1))||((i0.u2.p_rdy>=1)&&(i2.u1.access>=1)))))))
=> equivalent forward existential formula: ([(Init * !(((u3.r_stopped>=1)&&(i0.u0.initialize>=1))))] != FALSE + [(FwdU(Init,TRUE) * !((((i2.u4.p_sc>=1)&&((i2.u4.move>=1)&&(u3.r_active>=1)))&&(((i0.u0.p_i2>=1)&&(i0.u2.initialized>=1))||((i0.u2.p_rdy>=1)&&(i2.u1.access>=1))))))] != FALSE)
(forward)formula 3,1,0.111178,9128,1,0,7002,1898,208,14172,104,8068,7407
FORMULA RobotManipulation-PT-00002-CTLFireability-03 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL USE_NUPN
Formula is TRUE !
***************************************
original formula: ((i0.u2.p_rdy>=1)&&(i2.u1.access>=1))
=> equivalent forward existential formula: [(Init * ((i0.u2.p_rdy>=1)&&(i2.u1.access>=1)))] != FALSE
(forward)formula 4,0,0.111612,9128,1,0,7009,1898,213,14173,104,8068,7488
FORMULA RobotManipulation-PT-00002-CTLFireability-04 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL USE_NUPN
Formula is FALSE !
***************************************
original formula: E(AF(((i0.u0.p_i2>=1)&&(i0.u2.initialized>=1))) U ((u3.r_stopped>=1)&&(i0.u0.initialize>=1)))
=> equivalent forward existential formula: [(FwdU(Init,!(EG(!(((i0.u0.p_i2>=1)&&(i0.u2.initialized>=1)))))) * ((u3.r_stopped>=1)&&(i0.u0.initialize>=1)))] != FALSE
(forward)formula 5,1,0.150493,10184,1,0,11026,2095,244,19364,105,8669,11946
FORMULA RobotManipulation-PT-00002-CTLFireability-05 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL USE_NUPN
Formula is TRUE !
***************************************
original formula: AX(!(AX((u3.r_moving>=1))))
=> equivalent forward existential formula: [(EY(Init) * !(EX(!((u3.r_moving>=1)))))] = FALSE
(forward)formula 6,1,0.151557,10448,1,0,11055,2100,246,19464,106,8685,11975
FORMULA RobotManipulation-PT-00002-CTLFireability-06 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL USE_NUPN
Formula is TRUE !
***************************************
original formula: EX(EF(AG((i0.u0.p_i1>=1))))
=> equivalent forward existential formula: [(FwdU(EY(Init),TRUE) * !(E(TRUE U !((i0.u0.p_i1>=1)))))] != FALSE
(forward)formula 7,0,0.15639,10712,1,0,11190,2119,285,19700,109,8764,12674
FORMULA RobotManipulation-PT-00002-CTLFireability-07 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL USE_NUPN
Formula is FALSE !
***************************************
original formula: (i2.u1.p_rel>=1)
=> equivalent forward existential formula: [(Init * (i2.u1.p_rel>=1))] != FALSE
(forward)formula 8,0,0.156608,10712,1,0,11192,2119,286,19700,109,8764,12679
FORMULA RobotManipulation-PT-00002-CTLFireability-08 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL USE_NUPN
Formula is FALSE !
***************************************
original formula: ((i2.u4.move>=1)&&(u3.r_active>=1))
=> equivalent forward existential formula: [(Init * ((i2.u4.move>=1)&&(u3.r_active>=1)))] != FALSE
(forward)formula 9,0,0.157007,10712,1,0,11197,2119,290,19701,109,8764,12696
FORMULA RobotManipulation-PT-00002-CTLFireability-09 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL USE_NUPN
Formula is FALSE !
***************************************
original formula: (EG(!((u3.r_moving>=1))) * ((!(AX((i2.u4.p_sc>=1))) + AF(((i0.u0.p_i2>=1)&&(i0.u2.initialized>=1)))) + ((((i0.u2.p_rdy>=1)||((i0.u2.p_rdy>=1)&&(i2.u1.access>=1)))&&((i0.u2.p_rdy>=1)&&(i2.u1.access>=1))) + !(AX((i0.u2.p_rdy>=1))))))
=> equivalent forward existential formula: ([(Init * !(EG(!((u3.r_moving>=1)))))] = FALSE * [FwdG(((Init * !(((((i0.u2.p_rdy>=1)||((i0.u2.p_rdy>=1)&&(i2.u1.access>=1)))&&((i0.u2.p_rdy>=1)&&(i2.u1.access>=1))) + !(!(EX(!((i0.u2.p_rdy>=1)))))))) * !(!(!(EX(!((i2.u4.p_sc>=1))))))),!(((i0.u0.p_i2>=1)&&(i0.u2.initialized>=1))))] = FALSE)
(forward)formula 10,1,0.170108,11240,1,0,11819,2216,319,20854,110,9143,13517
FORMULA RobotManipulation-PT-00002-CTLFireability-10 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL USE_NUPN
Formula is TRUE !
***************************************
original formula: !((((i0.u2.p_rdy>=1)&&(i2.u1.access>=1))||(!(i2.u4.p_sc>=1))))
=> equivalent forward existential formula: [(Init * !((((i0.u2.p_rdy>=1)&&(i2.u1.access>=1))||(!(i2.u4.p_sc>=1)))))] != FALSE
(forward)formula 11,0,0.171092,11240,1,0,11838,2228,321,20902,110,9169,13524
FORMULA RobotManipulation-PT-00002-CTLFireability-11 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL USE_NUPN
Formula is FALSE !
***************************************
original formula: AF(E(((i0.u2.p_rdy>=1)||(i2.u1.p_rel>=1)) U !(((i2.u4.move>=1)&&(u3.r_active>=1)))))
=> equivalent forward existential formula: [FwdG(Init,!(E(((i0.u2.p_rdy>=1)||(i2.u1.p_rel>=1)) U !(((i2.u4.move>=1)&&(u3.r_active>=1))))))] = FALSE
(forward)formula 12,1,0.189473,11240,1,0,12810,2459,329,23127,110,9942,14433
FORMULA RobotManipulation-PT-00002-CTLFireability-12 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL USE_NUPN
Formula is TRUE !
***************************************
original formula: (E(!((i2.u1.p_rel>=1)) U !((((u3.r_stopped>=1)&&(i0.u0.initialize>=1))&&((i2.u4.p_m>=1)&&(i2.u1.moved>=1))))) * (A((((i2.u4.p_m>=1)&&(i2.u1.moved>=1))||(i0.u2.p_rdy>=1)) U ((u3.r_moving>=1)||((u3.r_stopped>=1)&&(i0.u0.initialize>=1)))) + E((i2.u4.p_sc>=1) U !(((i0.u0.p_i2>=1)&&(i0.u2.initialized>=1))))))
=> equivalent forward existential formula: ([(((Init * E(!((i2.u1.p_rel>=1)) U !((((u3.r_stopped>=1)&&(i0.u0.initialize>=1))&&((i2.u4.p_m>=1)&&(i2.u1.moved>=1)))))) * !(EG(!(((u3.r_moving>=1)||((u3.r_stopped>=1)&&(i0.u0.initialize>=1))))))) * !(E(!(((u3.r_moving>=1)||((u3.r_stopped>=1)&&(i0.u0.initialize>=1)))) U (!((((i2.u4.p_m>=1)&&(i2.u1.moved>=1))||(i0.u2.p_rdy>=1))) * !(((u3.r_moving>=1)||((u3.r_stopped>=1)&&(i0.u0.initialize>=1))))))))] != FALSE + [(FwdU((Init * E(!((i2.u1.p_rel>=1)) U !((((u3.r_stopped>=1)&&(i0.u0.initialize>=1))&&((i2.u4.p_m>=1)&&(i2.u1.moved>=1)))))),(i2.u4.p_sc>=1)) * !(((i0.u0.p_i2>=1)&&(i0.u2.initialized>=1))))] != FALSE)
(forward)formula 13,1,0.247182,13352,1,0,16050,2732,379,29007,110,10608,18791
FORMULA RobotManipulation-PT-00002-CTLFireability-13 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL USE_NUPN
Formula is TRUE !
***************************************
original formula: (((i2.u4.move>=1)&&(u3.r_active>=1)) + (AG((i0.u2.p_rdy>=1)) + ((i2.u4.move>=1)&&(u3.r_active>=1))))
=> equivalent forward existential formula: [(FwdU(((Init * !(((i2.u4.move>=1)&&(u3.r_active>=1)))) * !(((i2.u4.move>=1)&&(u3.r_active>=1)))),TRUE) * !((i0.u2.p_rdy>=1)))] = FALSE
(forward)formula 14,0,0.253292,13352,1,0,16267,2746,407,29334,112,10671,19698
FORMULA RobotManipulation-PT-00002-CTLFireability-14 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL USE_NUPN
Formula is FALSE !
***************************************
original formula: ((i2.u4.p_sc>=1) + EF(!(EF(((i2.u4.move>=1)&&(u3.r_active>=1))))))
=> equivalent forward existential formula: ([(Init * (i2.u4.p_sc>=1))] != FALSE + [(FwdU(Init,TRUE) * !(E(TRUE U ((i2.u4.move>=1)&&(u3.r_active>=1)))))] != FALSE)
(forward)formula 15,0,0.258951,13352,1,0,16548,2752,407,29811,112,10680,20443
FORMULA RobotManipulation-PT-00002-CTLFireability-15 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL USE_NUPN
Formula is FALSE !
***************************************
BK_STOP 1527290547909
--------------------
content from stderr:
+ export BINDIR=/home/mcc/BenchKit/
+ BINDIR=/home/mcc/BenchKit/
++ pwd
+ export MODEL=/home/mcc/execution
+ MODEL=/home/mcc/execution
+ /home/mcc/BenchKit//runeclipse.sh /home/mcc/execution CTLFireability -its -ltsminpath /home/mcc/BenchKit//lts_install_dir/ -louvain -smt
+ ulimit -s 65536
+ [[ -z '' ]]
+ export LTSMIN_MEM_SIZE=8589934592
+ LTSMIN_MEM_SIZE=8589934592
+ /home/mcc/BenchKit//itstools/its-tools -consoleLog -data /home/mcc/execution/workspace -pnfolder /home/mcc/execution -examination CTLFireability -z3path /home/mcc/BenchKit//z3/bin/z3 -yices2path /home/mcc/BenchKit//yices/bin/yices -its -ltsminpath /home/mcc/BenchKit//lts_install_dir/ -louvain -smt -vmargs -Dosgi.locking=none -Declipse.stateSaveDelayInterval=-1 -Dosgi.configuration.area=/tmp/.eclipse -Xss8m -Xms40m -Xmx8192m -Dfile.encoding=UTF-8 -Dosgi.requiredJavaVersion=1.6
May 25, 2018 11:22:26 PM fr.lip6.move.gal.application.Application start
INFO: Running its-tools with arguments : [-pnfolder, /home/mcc/execution, -examination, CTLFireability, -z3path, /home/mcc/BenchKit//z3/bin/z3, -yices2path, /home/mcc/BenchKit//yices/bin/yices, -its, -ltsminpath, /home/mcc/BenchKit//lts_install_dir/, -louvain, -smt]
May 25, 2018 11:22:26 PM fr.lip6.move.gal.application.MccTranslator transformPNML
INFO: Parsing pnml file : /home/mcc/execution/model.pnml
May 25, 2018 11:22:26 PM fr.lip6.move.gal.nupn.PTNetReader loadFromXML
INFO: Load time of PNML (sax parser for PT used): 27 ms
May 25, 2018 11:22:26 PM fr.lip6.move.gal.pnml.togal.PTGALTransformer handlePage
INFO: Transformed 15 places.
May 25, 2018 11:22:26 PM fr.lip6.move.gal.pnml.togal.PTGALTransformer handlePage
INFO: Transformed 11 transitions.
May 25, 2018 11:22:26 PM fr.lip6.move.serialization.SerializationUtil systemToFile
INFO: Time to serialize gal into /home/mcc/execution/model.pnml.img.gal : 6 ms
May 25, 2018 11:22:26 PM fr.lip6.move.gal.application.MccTranslator applyOrder
INFO: Applying decomposition
May 25, 2018 11:22:26 PM fr.lip6.move.gal.instantiate.GALRewriter flatten
INFO: Flatten gal took : 26 ms
May 25, 2018 11:22:26 PM fr.lip6.move.gal.instantiate.GALRewriter flatten
INFO: Flatten gal took : 7 ms
Begin: Fri May 25 23:22:26 2018
Computation of communities with the Newman-Girvan Modularity quality function
level 0:
start computation: Fri May 25 23:22:26 2018
network size: 15 nodes, 44 links, 22 weight
quality increased from -0.0774793 to 0.317149
end computation: Fri May 25 23:22:26 2018
level 1:
start computation: Fri May 25 23:22:26 2018
network size: 5 nodes, 21 links, 22 weight
quality increased from 0.317149 to 0.383264
end computation: Fri May 25 23:22:26 2018
level 2:
start computation: Fri May 25 23:22:26 2018
network size: 3 nodes, 9 links, 22 weight
quality increased from 0.383264 to 0.383264
end computation: Fri May 25 23:22:26 2018
End: Fri May 25 23:22:26 2018
Total duration: 0 sec
0.383264
May 25, 2018 11:22:26 PM fr.lip6.move.gal.instantiate.CompositeBuilder decomposeWithOrder
INFO: Decomposing Gal with order
May 25, 2018 11:22:26 PM fr.lip6.move.gal.instantiate.GALRewriter flatten
INFO: Flatten gal took : 7 ms
May 25, 2018 11:22:26 PM fr.lip6.move.gal.instantiate.CompositeBuilder rewriteArraysToAllowPartition
INFO: Rewriting arrays to variables to allow decomposition.
May 25, 2018 11:22:26 PM fr.lip6.move.serialization.SerializationUtil systemToFile
INFO: Time to serialize gal into /home/mcc/execution/CTLFireability.pnml.gal : 2 ms
May 25, 2018 11:22:26 PM fr.lip6.move.serialization.SerializationUtil serializePropertiesForITSCTLTools
INFO: Time to serialize properties into /home/mcc/execution/CTLFireability.ctl : 2 ms
Sequence of Actions to be Executed by the VM
This is useful if one wants to reexecute the tool in the VM from the submitted image disk.
set -x
# this is for BenchKit: configuration of major elements for the test
export BK_INPUT="RobotManipulation-PT-00002"
export BK_EXAMINATION="CTLFireability"
export BK_TOOL="itstoolsl"
export BK_RESULT_DIR="/tmp/BK_RESULTS/OUTPUTS"
export BK_TIME_CONFINEMENT="3600"
export BK_MEMORY_CONFINEMENT="16384"
# this is specific to your benchmark or test
export BIN_DIR="$HOME/BenchKit/bin"
# remove the execution directoty if it exists (to avoid increse of .vmdk images)
if [ -d execution ] ; then
rm -rf execution
fi
tar xzf /home/mcc/BenchKit/INPUTS/RobotManipulation-PT-00002.tgz
mv RobotManipulation-PT-00002 execution
cd execution
pwd
ls -lh
# this is for BenchKit: explicit launching of the test
echo "====================================================================="
echo " Generated by BenchKit 2-3637"
echo " Executing tool itstoolsl"
echo " Input is RobotManipulation-PT-00002, examination is CTLFireability"
echo " Time confinement is $BK_TIME_CONFINEMENT seconds"
echo " Memory confinement is 16384 MBytes"
echo " Number of cores is 4"
echo " Run identifier is r153-smll-152685550900011"
echo "====================================================================="
echo
echo "--------------------"
echo "content from stdout:"
echo
echo "=== Data for post analysis generated by BenchKit (invocation template)"
echo
if [ "CTLFireability" = "UpperBounds" ] ; then
echo "The expected result is a vector of positive values"
echo NUM_VECTOR
elif [ "CTLFireability" != "StateSpace" ] ; then
echo "The expected result is a vector of booleans"
echo BOOL_VECTOR
else
echo "no data necessary for post analysis"
fi
echo
if [ -f "CTLFireability.txt" ] ; then
echo "here is the order used to build the result vector(from text file)"
for x in $(grep Property CTLFireability.txt | cut -d ' ' -f 2 | sort -u) ; do
echo "FORMULA_NAME $x"
done
elif [ -f "CTLFireability.xml" ] ; then # for cunf (txt files deleted;-)
echo echo "here is the order used to build the result vector(from xml file)"
for x in $(grep '
echo "FORMULA_NAME $x"
done
fi
echo
echo "=== Now, execution of the tool begins"
echo
echo -n "BK_START "
date -u +%s%3N
echo
timeout -s 9 $BK_TIME_CONFINEMENT bash -c "/home/mcc/BenchKit/BenchKit_head.sh 2> STDERR ; echo ; echo -n \"BK_STOP \" ; date -u +%s%3N"
if [ $? -eq 137 ] ; then
echo
echo "BK_TIME_CONFINEMENT_REACHED"
fi
echo
echo "--------------------"
echo "content from stderr:"
echo
cat STDERR ;