
About the Execution of ITS-Tools for RobotManipulation-PT-00010
| Execution Summary | |||||
| Max Memory Used (MB) |
Time wait (ms) | CPU Usage (ms) | I/O Wait (ms) | Computed Result | Execution Status |
| 15751.990 | 25483.00 | 27746.00 | 486.50 | TTFFFTTTFFTTTTFF | normal |
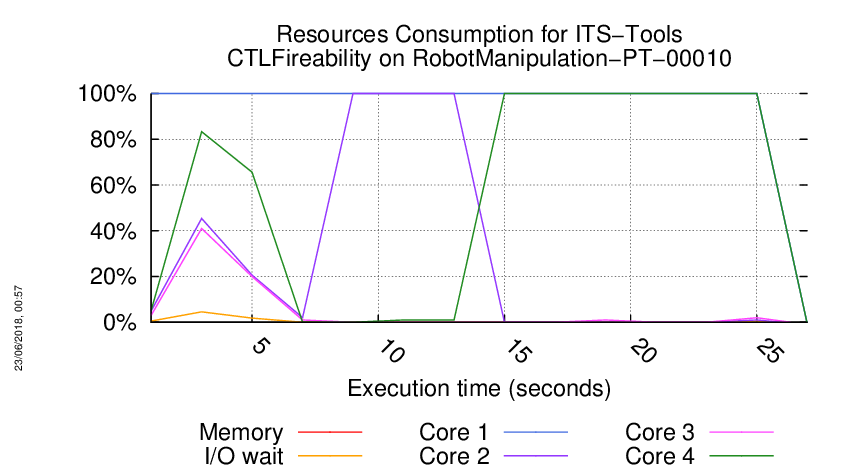
Execution Chart
We display below the execution chart for this examination (boot time has been removed).
Trace from the execution
Waiting for the VM to be ready (probing ssh)
.....................
/home/mcc/execution
total 184K
-rw-r--r-- 1 mcc users 4.1K May 15 18:54 CTLCardinality.txt
-rw-r--r-- 1 mcc users 22K May 15 18:54 CTLCardinality.xml
-rw-r--r-- 1 mcc users 2.5K May 15 18:54 CTLFireability.txt
-rw-r--r-- 1 mcc users 14K May 15 18:54 CTLFireability.xml
-rw-r--r-- 1 mcc users 4.0K May 15 18:50 GenericPropertiesDefinition.xml
-rw-r--r-- 1 mcc users 6.2K May 15 18:50 GenericPropertiesVerdict.xml
-rw-r--r-- 1 mcc users 2.6K May 15 18:54 LTLCardinality.txt
-rw-r--r-- 1 mcc users 11K May 15 18:54 LTLCardinality.xml
-rw-r--r-- 1 mcc users 2.1K May 15 18:54 LTLFireability.txt
-rw-r--r-- 1 mcc users 9.4K May 15 18:54 LTLFireability.xml
-rw-r--r-- 1 mcc users 4.1K May 15 18:54 ReachabilityCardinality.txt
-rw-r--r-- 1 mcc users 20K May 15 18:54 ReachabilityCardinality.xml
-rw-r--r-- 1 mcc users 117 May 15 18:54 ReachabilityDeadlock.txt
-rw-r--r-- 1 mcc users 355 May 15 18:54 ReachabilityDeadlock.xml
-rw-r--r-- 1 mcc users 3.3K May 15 18:54 ReachabilityFireability.txt
-rw-r--r-- 1 mcc users 19K May 15 18:54 ReachabilityFireability.xml
-rw-r--r-- 1 mcc users 1.8K May 15 18:54 UpperBounds.txt
-rw-r--r-- 1 mcc users 3.8K May 15 18:54 UpperBounds.xml
-rw-r--r-- 1 mcc users 6 May 15 18:50 equiv_col
-rw-r--r-- 1 mcc users 6 May 15 18:50 instance
-rw-r--r-- 1 mcc users 6 May 15 18:50 iscolored
-rw-r--r-- 1 mcc users 6.4K May 15 18:50 model.pnml
=====================================================================
Generated by BenchKit 2-3637
Executing tool itstools
Input is RobotManipulation-PT-00010, examination is CTLFireability
Time confinement is 3600 seconds
Memory confinement is 16384 MBytes
Number of cores is 4
Run identifier is r152-smll-152685550100025
=====================================================================
--------------------
content from stdout:
=== Data for post analysis generated by BenchKit (invocation template)
The expected result is a vector of booleans
BOOL_VECTOR
here is the order used to build the result vector(from text file)
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-00
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-01
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-02
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-03
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-04
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-05
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-06
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-07
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-08
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-09
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-10
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-11
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-12
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-13
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-14
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-15
=== Now, execution of the tool begins
BK_START 1526920933588
Invoking ITS tools like this :CommandLine [args=[/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.201805151631/bin/its-ctl-linux64, --gc-threshold, 2000000, --quiet, -i, /home/mcc/execution/CTLFireability.pnml.gal, -t, CGAL, -ctl, /home/mcc/execution/CTLFireability.ctl], workingDir=/home/mcc/execution]
its-ctl command run as :
/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.201805151631/bin/its-ctl-linux64 --gc-threshold 2000000 --quiet -i /home/mcc/execution/CTLFireability.pnml.gal -t CGAL -ctl /home/mcc/execution/CTLFireability.ctl
No direction supplied, using forward translation only.
Parsed 16 CTL formulae.
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
reachable,2.003e+07,1.37256,28472,2,4378,5,148951,6,0,74,154896,0
Converting to forward existential form...Done !
original formula: AF(((p_rdy>=1)&&(access>=1)))
=> equivalent forward existential formula: [FwdG(Init,!(((p_rdy>=1)&&(access>=1))))] = FALSE
Hit Full ! (commute/partial/dont) 7/0/4
(forward)formula 0,1,1.77006,28472,1,0,7,148951,20,1,645,154896,8
FORMULA RobotManipulation-PT-00010-CTLFireability-00 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: (((EF((((move>=1)&&(r_active>=1))||((p_i2>=1)&&(initialized>=1)))) + (p_rdy>=1)) * AF(((p_i2>=1)&&(initialized>=1)))) + AF((((p_m>=1)&&(moved>=1))||(p_rel>=1))))
=> equivalent forward existential formula: [FwdG((Init * !(((E(TRUE U (((move>=1)&&(r_active>=1))||((p_i2>=1)&&(initialized>=1)))) + (p_rdy>=1)) * !(EG(!(((p_i2>=1)&&(initialized>=1)))))))),!((((p_m>=1)&&(moved>=1))||(p_rel>=1))))] = FALSE
Reverse transition relation is exact ! Faster fixpoint algorithm enabled.
(forward)formula 1,1,2.20822,30436,1,0,13,148951,41,6,681,154896,15
FORMULA RobotManipulation-PT-00010-CTLFireability-01 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: A(!(AF(((r_active>=1)&&(off>=1)))) U (((!(p_sc>=1))||(p_rdy>=1))&&((((move>=1)&&(r_active>=1))&&(p_sc>=1))||(((p_i2>=1)&&(initialized>=1))&&(p_i1>=1)))))
=> equivalent forward existential formula: [((Init * !(EG(!((((!(p_sc>=1))||(p_rdy>=1))&&((((move>=1)&&(r_active>=1))&&(p_sc>=1))||(((p_i2>=1)&&(initialized>=1))&&(p_i1>=1)))))))) * !(E(!((((!(p_sc>=1))||(p_rdy>=1))&&((((move>=1)&&(r_active>=1))&&(p_sc>=1))||(((p_i2>=1)&&(initialized>=1))&&(p_i1>=1))))) U (!(!(!(EG(!(((r_active>=1)&&(off>=1))))))) * !((((!(p_sc>=1))||(p_rdy>=1))&&((((move>=1)&&(r_active>=1))&&(p_sc>=1))||(((p_i2>=1)&&(initialized>=1))&&(p_i1>=1)))))))))] != FALSE
Hit Full ! (commute/partial/dont) 1/0/10
(forward)formula 2,0,8.8768,162040,1,0,18,850099,58,11,720,897175,22
FORMULA RobotManipulation-PT-00010-CTLFireability-02 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is FALSE !
***************************************
original formula: EX(E(!(((p_rdy>=1)&&(access>=1))) U (((r_stopped>=1)&&(initialize>=1))&&(p_rel>=1))))
=> equivalent forward existential formula: [(FwdU(EY(Init),!(((p_rdy>=1)&&(access>=1)))) * (((r_stopped>=1)&&(initialize>=1))&&(p_rel>=1)))] != FALSE
Hit Full ! (commute/partial/dont) 7/0/4
(forward)formula 3,0,8.88822,162832,1,0,22,853187,65,12,727,899320,26
FORMULA RobotManipulation-PT-00010-CTLFireability-03 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is FALSE !
***************************************
original formula: AG((p_i1>=1))
=> equivalent forward existential formula: [(FwdU(Init,TRUE) * !((p_i1>=1)))] = FALSE
(forward)formula 4,0,8.90475,163096,1,0,25,854378,67,14,727,906379,27
FORMULA RobotManipulation-PT-00010-CTLFireability-04 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is FALSE !
***************************************
original formula: AG(EF((p_sc>=1)))
=> equivalent forward existential formula: [(FwdU(Init,TRUE) * !(E(TRUE U (p_sc>=1))))] = FALSE
(forward)formula 5,1,8.97338,163888,1,0,26,859061,68,14,727,910584,30
FORMULA RobotManipulation-PT-00010-CTLFireability-05 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: AF(((p_i2>=1)&&(initialized>=1)))
=> equivalent forward existential formula: [FwdG(Init,!(((p_i2>=1)&&(initialized>=1))))] = FALSE
Hit Full ! (commute/partial/dont) 8/0/3
(forward)formula 6,1,8.97998,164152,1,0,27,859654,74,15,750,911019,33
FORMULA RobotManipulation-PT-00010-CTLFireability-06 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: AF((((p_rel>=1) * EF(((p_m>=1)&&(moved>=1)))) + ((p_rdy>=1)&&(access>=1))))
=> equivalent forward existential formula: [FwdG(Init,!((((p_rel>=1) * E(TRUE U ((p_m>=1)&&(moved>=1)))) + ((p_rdy>=1)&&(access>=1)))))] = FALSE
(forward)formula 7,1,9.1395,167584,1,0,150,878773,79,103,750,940005,122
FORMULA RobotManipulation-PT-00010-CTLFireability-07 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: AF(!(AF(((p_sc>=1)||((p_rdy>=1)&&(access>=1))))))
=> equivalent forward existential formula: [FwdG(Init,!(!(!(EG(!(((p_sc>=1)||((p_rdy>=1)&&(access>=1)))))))))] = FALSE
(forward)formula 8,0,13.5973,259004,1,0,151,1.47278e+06,88,104,769,1.48217e+06,126
FORMULA RobotManipulation-PT-00010-CTLFireability-08 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is FALSE !
***************************************
original formula: EF(AG((p_sc>=1)))
=> equivalent forward existential formula: [(FwdU(Init,TRUE) * !(E(TRUE U !((p_sc>=1)))))] != FALSE
(forward)formula 9,0,13.9508,266132,1,0,152,1.51266e+06,89,104,769,1.52257e+06,129
FORMULA RobotManipulation-PT-00010-CTLFireability-09 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is FALSE !
***************************************
original formula: AX(AF(((p_i2>=1)&&(initialized>=1))))
=> equivalent forward existential formula: [FwdG(EY(Init),!(((p_i2>=1)&&(initialized>=1))))] = FALSE
Hit Full ! (commute/partial/dont) 8/0/3
(forward)formula 10,1,13.9543,266396,1,0,153,1.51287e+06,89,105,769,1.52284e+06,132
FORMULA RobotManipulation-PT-00010-CTLFireability-10 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: E((EF(((p_i2>=1)&&(initialized>=1))) * AF(((p_rdy>=1)&&(access>=1)))) U ((p_m>=1)&&(moved>=1)))
=> equivalent forward existential formula: [(FwdU(Init,(E(TRUE U ((p_i2>=1)&&(initialized>=1))) * !(EG(!(((p_rdy>=1)&&(access>=1))))))) * ((p_m>=1)&&(moved>=1)))] != FALSE
(forward)formula 11,1,20.1375,367864,1,0,155,2.16932e+06,95,106,772,2.13214e+06,135
FORMULA RobotManipulation-PT-00010-CTLFireability-11 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: AX((((((r_active>=1)&&(off>=1))&&(p_i1>=1))||(((r_moving>=1)&&((p_i2>=1)&&(initialized>=1)))&&((move>=1)&&(r_active>=1)))) + AF((((p_rdy>=1)&&(access>=1))||((p_m>=1)&&(moved>=1))))))
=> equivalent forward existential formula: [FwdG((EY(Init) * !(((((r_active>=1)&&(off>=1))&&(p_i1>=1))||(((r_moving>=1)&&((p_i2>=1)&&(initialized>=1)))&&((move>=1)&&(r_active>=1)))))),!((((p_rdy>=1)&&(access>=1))||((p_m>=1)&&(moved>=1)))))] = FALSE
Hit Full ! (commute/partial/dont) 4/5/7
(forward)formula 12,1,20.1694,368656,1,0,158,2.17502e+06,105,109,800,2.13942e+06,140
FORMULA RobotManipulation-PT-00010-CTLFireability-12 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: (E((((p_i2>=1)&&(initialized>=1))&&((r_stopped>=1)&&(initialize>=1))) U AF((p_rdy>=1))) + (!(AX(!((p_sc>=1)))) * (p_rel>=1)))
=> equivalent forward existential formula: ([(FwdU(Init,(((p_i2>=1)&&(initialized>=1))&&((r_stopped>=1)&&(initialize>=1)))) * !(EG(!((p_rdy>=1)))))] != FALSE + [(EY((Init * (p_rel>=1))) * (p_sc>=1))] != FALSE)
Hit Full ! (commute/partial/dont) 7/8/4
(forward)formula 13,1,20.3249,372880,1,0,159,2.17689e+06,119,109,829,2.13982e+06,144
FORMULA RobotManipulation-PT-00010-CTLFireability-13 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: EG(AX(!((((p_m>=1)&&(moved>=1))||(p_sc>=1)))))
=> equivalent forward existential formula: [FwdG(Init,!(EX(!(!((((p_m>=1)&&(moved>=1))||(p_sc>=1)))))))] != FALSE
(forward)formula 14,0,20.4349,374200,1,0,162,2.19191e+06,123,153,830,2.15744e+06,189
FORMULA RobotManipulation-PT-00010-CTLFireability-14 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is FALSE !
***************************************
original formula: (EG((((move>=1)&&(r_active>=1))&&((p_i2>=1)&&(initialized>=1)))) + ((r_stopped>=1)&&(initialize>=1)))
=> equivalent forward existential formula: ([FwdG(Init,(((move>=1)&&(r_active>=1))&&((p_i2>=1)&&(initialized>=1))))] != FALSE + [(Init * ((r_stopped>=1)&&(initialize>=1)))] != FALSE)
(forward)formula 15,0,20.4362,374464,1,0,163,2.19191e+06,130,154,833,2.15744e+06,191
FORMULA RobotManipulation-PT-00010-CTLFireability-15 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is FALSE !
***************************************
BK_STOP 1526920959071
--------------------
content from stderr:
+ export BINDIR=/home/mcc/BenchKit/
+ BINDIR=/home/mcc/BenchKit/
++ pwd
+ export MODEL=/home/mcc/execution
+ MODEL=/home/mcc/execution
+ /home/mcc/BenchKit//runeclipse.sh /home/mcc/execution CTLFireability -its -ltsminpath /home/mcc/BenchKit//lts_install_dir/ -smt
+ ulimit -s 65536
+ [[ -z '' ]]
+ export LTSMIN_MEM_SIZE=8589934592
+ LTSMIN_MEM_SIZE=8589934592
+ /home/mcc/BenchKit//itstools/its-tools -consoleLog -data /home/mcc/execution/workspace -pnfolder /home/mcc/execution -examination CTLFireability -z3path /home/mcc/BenchKit//z3/bin/z3 -yices2path /home/mcc/BenchKit//yices/bin/yices -its -ltsminpath /home/mcc/BenchKit//lts_install_dir/ -smt -vmargs -Dosgi.locking=none -Declipse.stateSaveDelayInterval=-1 -Dosgi.configuration.area=/tmp/.eclipse -Xss8m -Xms40m -Xmx8192m -Dfile.encoding=UTF-8 -Dosgi.requiredJavaVersion=1.6
May 21, 2018 4:42:16 PM fr.lip6.move.gal.application.Application start
INFO: Running its-tools with arguments : [-pnfolder, /home/mcc/execution, -examination, CTLFireability, -z3path, /home/mcc/BenchKit//z3/bin/z3, -yices2path, /home/mcc/BenchKit//yices/bin/yices, -its, -ltsminpath, /home/mcc/BenchKit//lts_install_dir/, -smt]
May 21, 2018 4:42:16 PM fr.lip6.move.gal.application.MccTranslator transformPNML
INFO: Parsing pnml file : /home/mcc/execution/model.pnml
May 21, 2018 4:42:16 PM fr.lip6.move.gal.nupn.PTNetReader loadFromXML
INFO: Load time of PNML (sax parser for PT used): 41 ms
May 21, 2018 4:42:16 PM fr.lip6.move.gal.pnml.togal.PTGALTransformer handlePage
INFO: Transformed 15 places.
May 21, 2018 4:42:17 PM fr.lip6.move.gal.pnml.togal.PTGALTransformer handlePage
INFO: Transformed 11 transitions.
May 21, 2018 4:42:17 PM fr.lip6.move.serialization.SerializationUtil systemToFile
INFO: Time to serialize gal into /home/mcc/execution/model.pnml.img.gal : 9 ms
May 21, 2018 4:42:17 PM fr.lip6.move.gal.instantiate.GALRewriter flatten
INFO: Flatten gal took : 34 ms
May 21, 2018 4:42:17 PM fr.lip6.move.serialization.SerializationUtil systemToFile
INFO: Time to serialize gal into /home/mcc/execution/CTLFireability.pnml.gal : 1 ms
May 21, 2018 4:42:17 PM fr.lip6.move.serialization.SerializationUtil serializePropertiesForITSCTLTools
INFO: Time to serialize properties into /home/mcc/execution/CTLFireability.ctl : 3 ms
Sequence of Actions to be Executed by the VM
This is useful if one wants to reexecute the tool in the VM from the submitted image disk.
set -x
# this is for BenchKit: configuration of major elements for the test
export BK_INPUT="RobotManipulation-PT-00010"
export BK_EXAMINATION="CTLFireability"
export BK_TOOL="itstools"
export BK_RESULT_DIR="/tmp/BK_RESULTS/OUTPUTS"
export BK_TIME_CONFINEMENT="3600"
export BK_MEMORY_CONFINEMENT="16384"
# this is specific to your benchmark or test
export BIN_DIR="$HOME/BenchKit/bin"
# remove the execution directoty if it exists (to avoid increse of .vmdk images)
if [ -d execution ] ; then
rm -rf execution
fi
tar xzf /home/mcc/BenchKit/INPUTS/RobotManipulation-PT-00010.tgz
mv RobotManipulation-PT-00010 execution
cd execution
pwd
ls -lh
# this is for BenchKit: explicit launching of the test
echo "====================================================================="
echo " Generated by BenchKit 2-3637"
echo " Executing tool itstools"
echo " Input is RobotManipulation-PT-00010, examination is CTLFireability"
echo " Time confinement is $BK_TIME_CONFINEMENT seconds"
echo " Memory confinement is 16384 MBytes"
echo " Number of cores is 4"
echo " Run identifier is r152-smll-152685550100025"
echo "====================================================================="
echo
echo "--------------------"
echo "content from stdout:"
echo
echo "=== Data for post analysis generated by BenchKit (invocation template)"
echo
if [ "CTLFireability" = "UpperBounds" ] ; then
echo "The expected result is a vector of positive values"
echo NUM_VECTOR
elif [ "CTLFireability" != "StateSpace" ] ; then
echo "The expected result is a vector of booleans"
echo BOOL_VECTOR
else
echo "no data necessary for post analysis"
fi
echo
if [ -f "CTLFireability.txt" ] ; then
echo "here is the order used to build the result vector(from text file)"
for x in $(grep Property CTLFireability.txt | cut -d ' ' -f 2 | sort -u) ; do
echo "FORMULA_NAME $x"
done
elif [ -f "CTLFireability.xml" ] ; then # for cunf (txt files deleted;-)
echo echo "here is the order used to build the result vector(from xml file)"
for x in $(grep '
echo "FORMULA_NAME $x"
done
fi
echo
echo "=== Now, execution of the tool begins"
echo
echo -n "BK_START "
date -u +%s%3N
echo
timeout -s 9 $BK_TIME_CONFINEMENT bash -c "/home/mcc/BenchKit/BenchKit_head.sh 2> STDERR ; echo ; echo -n \"BK_STOP \" ; date -u +%s%3N"
if [ $? -eq 137 ] ; then
echo
echo "BK_TIME_CONFINEMENT_REACHED"
fi
echo
echo "--------------------"
echo "content from stderr:"
echo
cat STDERR ;