
About the Execution of Irma.struct for RobotManipulation-PT-00010
| Execution Summary | |||||
| Max Memory Used (MB) |
Time wait (ms) | CPU Usage (ms) | I/O Wait (ms) | Computed Result | Execution Status |
| 8024.500 | 23715.00 | 22936.00 | 541.30 | TTFFFTTTFFTTTTFF | normal |
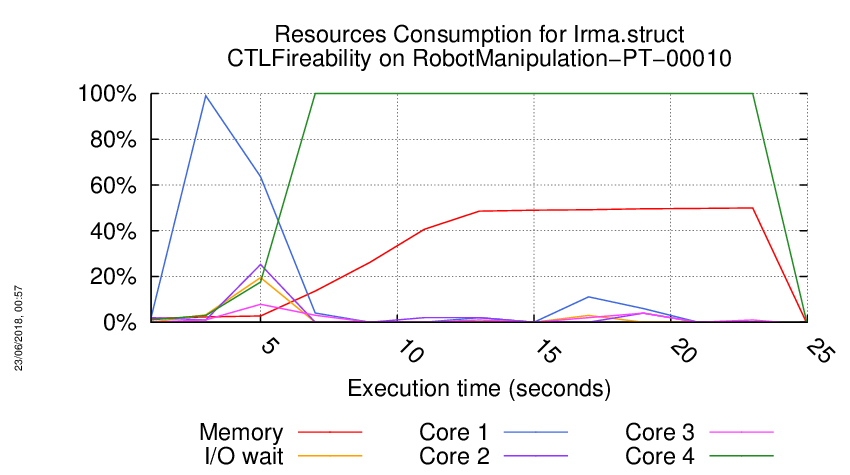
Execution Chart
We display below the execution chart for this examination (boot time has been removed).
Trace from the execution
Waiting for the VM to be ready (probing ssh)
......................
/home/mcc/execution
total 184K
-rw-r--r-- 1 mcc users 4.1K May 15 18:54 CTLCardinality.txt
-rw-r--r-- 1 mcc users 22K May 15 18:54 CTLCardinality.xml
-rw-r--r-- 1 mcc users 2.5K May 15 18:54 CTLFireability.txt
-rw-r--r-- 1 mcc users 14K May 15 18:54 CTLFireability.xml
-rw-r--r-- 1 mcc users 4.0K May 15 18:50 GenericPropertiesDefinition.xml
-rw-r--r-- 1 mcc users 6.2K May 15 18:50 GenericPropertiesVerdict.xml
-rw-r--r-- 1 mcc users 2.6K May 15 18:54 LTLCardinality.txt
-rw-r--r-- 1 mcc users 11K May 15 18:54 LTLCardinality.xml
-rw-r--r-- 1 mcc users 2.1K May 15 18:54 LTLFireability.txt
-rw-r--r-- 1 mcc users 9.4K May 15 18:54 LTLFireability.xml
-rw-r--r-- 1 mcc users 4.1K May 15 18:54 ReachabilityCardinality.txt
-rw-r--r-- 1 mcc users 20K May 15 18:54 ReachabilityCardinality.xml
-rw-r--r-- 1 mcc users 117 May 15 18:54 ReachabilityDeadlock.txt
-rw-r--r-- 1 mcc users 355 May 15 18:54 ReachabilityDeadlock.xml
-rw-r--r-- 1 mcc users 3.3K May 15 18:54 ReachabilityFireability.txt
-rw-r--r-- 1 mcc users 19K May 15 18:54 ReachabilityFireability.xml
-rw-r--r-- 1 mcc users 1.8K May 15 18:54 UpperBounds.txt
-rw-r--r-- 1 mcc users 3.8K May 15 18:54 UpperBounds.xml
-rw-r--r-- 1 mcc users 6 May 15 18:50 equiv_col
-rw-r--r-- 1 mcc users 6 May 15 18:50 instance
-rw-r--r-- 1 mcc users 6 May 15 18:50 iscolored
-rw-r--r-- 1 mcc users 6.4K May 15 18:50 model.pnml
=====================================================================
Generated by BenchKit 2-3637
Executing tool irma4mcc-structural
Input is RobotManipulation-PT-00010, examination is CTLFireability
Time confinement is 3600 seconds
Memory confinement is 16384 MBytes
Number of cores is 4
Run identifier is r151-smll-152685549400025
=====================================================================
--------------------
content from stdout:
=== Data for post analysis generated by BenchKit (invocation template)
The expected result is a vector of booleans
BOOL_VECTOR
here is the order used to build the result vector(from text file)
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-00
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-01
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-02
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-03
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-04
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-05
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-06
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-07
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-08
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-09
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-10
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-11
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-12
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-13
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-14
FORMULA_NAME RobotManipulation-PT-00010-CTLFireability-15
=== Now, execution of the tool begins
BK_START 1526921321475
BK_STOP 1526921345190
--------------------
content from stderr:
Prefix is 75f5f979.
Reading known information in /usr/share/mcc4mcc/75f5f979-known.json.
Reading learned information in /usr/share/mcc4mcc/75f5f979-learned.json.
Reading value translations in /usr/share/mcc4mcc/75f5f979-values.json.
Using directory /home/mcc/execution for input, as it contains a model.pnml file.
Using RobotManipulation-PT-00010 as instance name.
Using RobotManipulation as model name.
Using algorithm or tool bmdt.
Model characteristics are: {'Examination': 'CTLFireability', 'Place/Transition': True, 'Colored': False, 'Relative-Time': 1, 'Relative-Memory': 1, 'Ordinary': True, 'Simple Free Choice': False, 'Extended Free Choice': False, 'State Machine': False, 'Marked Graph': False, 'Connected': True, 'Strongly Connected': True, 'Source Place': False, 'Sink Place': False, 'Source Transition': False, 'Sink Transition': False, 'Loop Free': True, 'Conservative': False, 'Sub-Conservative': False, 'Nested Units': False, 'Safe': False, 'Deadlock': False, 'Reversible': True, 'Quasi Live': True, 'Live': True}.
Known tools are: [{'Time': 14113, 'Memory': 7611.39, 'Tool': 'marcie'}, {'Time': 14823, 'Memory': 308.45, 'Tool': 'gspn'}, {'Time': 25825, 'Memory': 597.91, 'Tool': 'itstools'}, {'Time': 297080, 'Memory': 3724.49, 'Tool': 'lola'}].
Learned tools are: [{'Tool': 'itstools'}].
Learned tool itstools is 1.8298731665840007x far from the best tool marcie.
CTLFireability marcie RobotManipulation-PT-00010...
timeout --kill-after=10s --signal=SIGINT 1m for testing only
Marcie rev. 8852M (built: crohr on 2017-05-03)
A model checker for Generalized Stochastic Petri nets
authors: Alex Tovchigrechko (IDD package and CTL model checking)
check for maximal unmarked siphon
ok
Martin Schwarick (Symbolic numerical analysis and CSL model checking)
Christian Rohr (Simulative and approximative numerical model checking)
marcie@informatik.tu-cottbus.de
called as: marcie --net-file=model.pnml --mcc-file=CTLFireability.xml --memory=6
parse successfull
check for constant places
ok
net created successfully
Net: RobotManipulation_PT_00010
(NrP: 15 NrTr: 11 NrArc: 34)
parse formulas
check if there are places and transitions
ok
check if there are transitions without pre-places
ok
check if at least one transition is enabled in m0
ok
check if there are transitions that can never fire
ok
formulas created successfully
place and transition orderings generation:0m 0.000sec
net check time: 0m 0.000sec
init dd package: 0m 1.974sec
ptnet_zbdd.cc:255: Boundedness exception: net is not 1-bounded!
check for maximal unmarked siphon
ok
check for constant places
ok
parse successfull
net created successfully
Net: RobotManipulation_PT_00010
(NrP: 15 NrTr: 11 NrArc: 34)
parse formulas
formulas created successfully
place and transition orderings generation:0m 0.000sec
check if there are places and transitions
ok
check if there are transitions without pre-places
ok
check if at least one transition is enabled in m0
ok
check if there are transitions that can never fire
ok
net check time: 0m 0.000sec
init dd package: 0m 5.241sec
initing FirstDep: 0m 0.000sec
iterations count:853 (77), effective:201 (18)
initing FirstDep: 0m 0.000sec
RS generation: 0m 0.111sec
-> reachability set: #nodes 9437 (9.4e+03) #states 20,030,010 (7)
starting MCC model checker
--------------------------
iterations count:53 (4), effective:21 (1)
checking: AF [IS_FIREABLE [p_intoSC]]
normalized: ~ [EG [~ [IS_FIREABLE [p_intoSC]]]]
...................................................................................
EG iterations: 83
-> the formula is TRUE
FORMULA RobotManipulation-PT-00010-CTLFireability-00 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 2.956sec
checking: AG [IS_FIREABLE [p_start]]
normalized: ~ [E [true U ~ [IS_FIREABLE [p_start]]]]
iterations count:44 (4), effective:9 (0)
-> the formula is FALSE
FORMULA RobotManipulation-PT-00010-CTLFireability-04 FALSE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.089sec
checking: AG [EF [IS_FIREABLE [p_move]]]
normalized: ~ [E [true U ~ [E [true U IS_FIREABLE [p_move]]]]]
-> the formula is TRUE
FORMULA RobotManipulation-PT-00010-CTLFireability-05 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.075sec
checking: AF [IS_FIREABLE [p_started]]
normalized: ~ [EG [~ [IS_FIREABLE [p_started]]]]
...........................................
EG iterations: 43
-> the formula is TRUE
FORMULA RobotManipulation-PT-00010-CTLFireability-06 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.098sec
checking: EF [AG [IS_FIREABLE [p_move]]]
normalized: E [true U ~ [E [true U ~ [IS_FIREABLE [p_move]]]]]
iterations count:211 (19), effective:20 (1)
iterations count:39 (3), effective:6 (0)
-> the formula is FALSE
FORMULA RobotManipulation-PT-00010-CTLFireability-09 FALSE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.041sec
checking: AX [AF [IS_FIREABLE [p_started]]]
normalized: ~ [EX [EG [~ [IS_FIREABLE [p_started]]]]]
...........................................
EG iterations: 43
.-> the formula is TRUE
FORMULA RobotManipulation-PT-00010-CTLFireability-10 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.008sec
checking: AF [~ [AF [[IS_FIREABLE [p_intoSC] | IS_FIREABLE [p_move]]]]]
normalized: ~ [EG [~ [EG [~ [[IS_FIREABLE [p_intoSC] | IS_FIREABLE [p_move]]]]]]]
...............................................................
EG iterations: 63
EG iterations: 0
-> the formula is FALSE
FORMULA RobotManipulation-PT-00010-CTLFireability-08 FALSE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.372sec
checking: EG [AX [~ [[IS_FIREABLE [p_move] | IS_FIREABLE [p_moved]]]]]
normalized: EG [~ [EX [[IS_FIREABLE [p_move] | IS_FIREABLE [p_moved]]]]]
................................................................
EG iterations: 63
-> the formula is FALSE
FORMULA RobotManipulation-PT-00010-CTLFireability-14 FALSE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 1.229sec
checking: EX [E [~ [IS_FIREABLE [p_intoSC]] U [IS_FIREABLE [p_relSC] & IS_FIREABLE [r_starts]]]]
normalized: EX [E [~ [IS_FIREABLE [p_intoSC]] U [IS_FIREABLE [p_relSC] & IS_FIREABLE [r_starts]]]]
.-> the formula is FALSE
FORMULA RobotManipulation-PT-00010-CTLFireability-03 FALSE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.268sec
checking: AF [[IS_FIREABLE [p_intoSC] | [EF [IS_FIREABLE [p_moved]] & IS_FIREABLE [p_relSC]]]]
normalized: ~ [EG [~ [[IS_FIREABLE [p_intoSC] | [IS_FIREABLE [p_relSC] & E [true U IS_FIREABLE [p_moved]]]]]]]
iterations count:44 (4), effective:9 (0)
...............................................................
EG iterations: 63
-> the formula is TRUE
iterations count:51 (4), effective:9 (0)
iterations count:44 (4), effective:9 (0)
FORMULA RobotManipulation-PT-00010-CTLFireability-07 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.165sec
checking: E [[AF [IS_FIREABLE [p_intoSC]] & EF [IS_FIREABLE [p_started]]] U IS_FIREABLE [p_moved]]
normalized: E [[E [true U IS_FIREABLE [p_started]] & ~ [EG [~ [IS_FIREABLE [p_intoSC]]]]] U IS_FIREABLE [p_moved]]
...................................................................................
EG iterations: 83
-> the formula is TRUE
iterations count:11 (1), effective:0 (0)
FORMULA RobotManipulation-PT-00010-CTLFireability-11 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.048sec
checking: [IS_FIREABLE [r_starts] | EG [EG [[IS_FIREABLE [p_started] & IS_FIREABLE [r_begin_move]]]]]
normalized: [IS_FIREABLE [r_starts] | EG [EG [[IS_FIREABLE [p_started] & IS_FIREABLE [r_begin_move]]]]]
.
EG iterations: 1
.
EG iterations: 1
-> the formula is FALSE
FORMULA RobotManipulation-PT-00010-CTLFireability-15 FALSE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.107sec
checking: [[IS_FIREABLE [p_relSC] & ~ [AX [~ [IS_FIREABLE [p_move]]]]] | E [[IS_FIREABLE [r_starts] & IS_FIREABLE [p_started]] U AF [IS_FIREABLE [p_sop]]]]
normalized: [E [[IS_FIREABLE [r_starts] & IS_FIREABLE [p_started]] U ~ [EG [~ [IS_FIREABLE [p_sop]]]]] | [IS_FIREABLE [p_relSC] & EX [IS_FIREABLE [p_move]]]]
....................................................................................
EG iterations: 83
-> the formula is TRUE
FORMULA RobotManipulation-PT-00010-CTLFireability-13 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.031sec
checking: [AF [[IS_FIREABLE [p_relSC] | IS_FIREABLE [p_moved]]] | [AF [IS_FIREABLE [p_started]] & [IS_FIREABLE [p_sop] | EF [[IS_FIREABLE [p_started] | IS_FIREABLE [r_begin_move]]]]]]
normalized: [[[IS_FIREABLE [p_sop] | E [true U [IS_FIREABLE [p_started] | IS_FIREABLE [r_begin_move]]]] & ~ [EG [~ [IS_FIREABLE [p_started]]]]] | ~ [EG [~ [[IS_FIREABLE [p_relSC] | IS_FIREABLE [p_moved]]]]]]
...........................................
EG iterations: 43
...........................................
EG iterations: 43
iterations count:50 (4), effective:8 (0)
-> the formula is TRUE
FORMULA RobotManipulation-PT-00010-CTLFireability-01 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.189sec
checking: A [~ [AF [IS_FIREABLE [r_stops]]] U [[[IS_FIREABLE [p_start] & IS_FIREABLE [p_started]] | [IS_FIREABLE [p_move] & IS_FIREABLE [r_begin_move]]] & [IS_FIREABLE [p_sop] | ~ [IS_FIREABLE [p_move]]]]]
normalized: [~ [EG [~ [[[IS_FIREABLE [p_sop] | ~ [IS_FIREABLE [p_move]]] & [[IS_FIREABLE [p_move] & IS_FIREABLE [r_begin_move]] | [IS_FIREABLE [p_start] & IS_FIREABLE [p_started]]]]]]] & ~ [E [~ [[[IS_FIREABLE [p_sop] | ~ [IS_FIREABLE [p_move]]] & [[IS_FIREABLE [p_move] & IS_FIREABLE [r_begin_move]] | [IS_FIREABLE [p_start] & IS_FIREABLE [p_started]]]]] U [~ [EG [~ [IS_FIREABLE [r_stops]]]] & ~ [[[IS_FIREABLE [p_sop] | ~ [IS_FIREABLE [p_move]]] & [[IS_FIREABLE [p_move] & IS_FIREABLE [r_begin_move]] | [IS_FIREABLE [p_start] & IS_FIREABLE [p_started]]]]]]]]]
.
EG iterations: 1
iterations count:213 (19), effective:84 (7)
.
EG iterations: 1
-> the formula is FALSE
FORMULA RobotManipulation-PT-00010-CTLFireability-02 FALSE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 1.046sec
checking: AX [[AF [[IS_FIREABLE [p_moved] | IS_FIREABLE [p_intoSC]]] | [[IS_FIREABLE [r_begin_move] & [IS_FIREABLE [p_started] & IS_FIREABLE [r_end_move]]] | [[IS_FIREABLE [p_start] & IS_FIREABLE [r_stops]] & [IS_FIREABLE [p_start] & IS_FIREABLE [r_stops]]]]]]
normalized: ~ [EX [~ [[[[[IS_FIREABLE [p_start] & IS_FIREABLE [r_stops]] & [IS_FIREABLE [p_start] & IS_FIREABLE [r_stops]]] | [IS_FIREABLE [r_begin_move] & [IS_FIREABLE [p_started] & IS_FIREABLE [r_end_move]]]] | ~ [EG [~ [[IS_FIREABLE [p_moved] | IS_FIREABLE [p_intoSC]]]]]]]]]
...............................................................
EG iterations: 63
.-> the formula is TRUE
FORMULA RobotManipulation-PT-00010-CTLFireability-12 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 2.129sec
totally nodes used: 1971465 (2.0e+06)
number of garbage collections: 0
fire ops cache: hits/miss/sum: 8829837 5583704 14413541
used/not used/entry size/cache size: 6392363 60716501 16 1024MB
basic ops cache: hits/miss/sum: 2850769 1775561 4626330
used/not used/entry size/cache size: 3023637 13753579 12 192MB
unary ops cache: hits/miss/sum: 0 0 0
used/not used/entry size/cache size: 0 16777216 8 128MB
abstract ops cache: hits/miss/sum: 0 0 0
used/not used/entry size/cache size: 0 16777216 12 192MB
state nr cache: hits/miss/sum: 20076 9437 29513
used/not used/entry size/cache size: 9437 8379171 32 256MB
max state cache: hits/miss/sum: 0 0 0
used/not used/entry size/cache size: 0 8388608 32 256MB
uniqueHash elements/entry size/size: 67108864 4 256MB
0 65437097
1 1567293
2 70768
3 12342
4 4387
5 3971
6 4035
7 1926
8 1007
9 808
>= 10 5230
Total processing time: 0m18.280sec
Sequence of Actions to be Executed by the VM
This is useful if one wants to reexecute the tool in the VM from the submitted image disk.
set -x
# this is for BenchKit: configuration of major elements for the test
export BK_INPUT="RobotManipulation-PT-00010"
export BK_EXAMINATION="CTLFireability"
export BK_TOOL="irma4mcc-structural"
export BK_RESULT_DIR="/tmp/BK_RESULTS/OUTPUTS"
export BK_TIME_CONFINEMENT="3600"
export BK_MEMORY_CONFINEMENT="16384"
# this is specific to your benchmark or test
export BIN_DIR="$HOME/BenchKit/bin"
# remove the execution directoty if it exists (to avoid increse of .vmdk images)
if [ -d execution ] ; then
rm -rf execution
fi
tar xzf /home/mcc/BenchKit/INPUTS/RobotManipulation-PT-00010.tgz
mv RobotManipulation-PT-00010 execution
cd execution
pwd
ls -lh
# this is for BenchKit: explicit launching of the test
echo "====================================================================="
echo " Generated by BenchKit 2-3637"
echo " Executing tool irma4mcc-structural"
echo " Input is RobotManipulation-PT-00010, examination is CTLFireability"
echo " Time confinement is $BK_TIME_CONFINEMENT seconds"
echo " Memory confinement is 16384 MBytes"
echo " Number of cores is 4"
echo " Run identifier is r151-smll-152685549400025"
echo "====================================================================="
echo
echo "--------------------"
echo "content from stdout:"
echo
echo "=== Data for post analysis generated by BenchKit (invocation template)"
echo
if [ "CTLFireability" = "UpperBounds" ] ; then
echo "The expected result is a vector of positive values"
echo NUM_VECTOR
elif [ "CTLFireability" != "StateSpace" ] ; then
echo "The expected result is a vector of booleans"
echo BOOL_VECTOR
else
echo "no data necessary for post analysis"
fi
echo
if [ -f "CTLFireability.txt" ] ; then
echo "here is the order used to build the result vector(from text file)"
for x in $(grep Property CTLFireability.txt | cut -d ' ' -f 2 | sort -u) ; do
echo "FORMULA_NAME $x"
done
elif [ -f "CTLFireability.xml" ] ; then # for cunf (txt files deleted;-)
echo echo "here is the order used to build the result vector(from xml file)"
for x in $(grep '
echo "FORMULA_NAME $x"
done
fi
echo
echo "=== Now, execution of the tool begins"
echo
echo -n "BK_START "
date -u +%s%3N
echo
timeout -s 9 $BK_TIME_CONFINEMENT bash -c "/home/mcc/BenchKit/BenchKit_head.sh 2> STDERR ; echo ; echo -n \"BK_STOP \" ; date -u +%s%3N"
if [ $? -eq 137 ] ; then
echo
echo "BK_TIME_CONFINEMENT_REACHED"
fi
echo
echo "--------------------"
echo "content from stderr:"
echo
cat STDERR ;