
About the Execution of ITS-Tools for ParamProductionCell-PT-5
| Execution Summary | |||||
| Max Memory Used (MB) |
Time wait (ms) | CPU Usage (ms) | I/O Wait (ms) | Computed Result | Execution Status |
| 15744.130 | 3486.00 | 8699.00 | 99.80 | FTTTTFFTTTTTTFFT | normal |
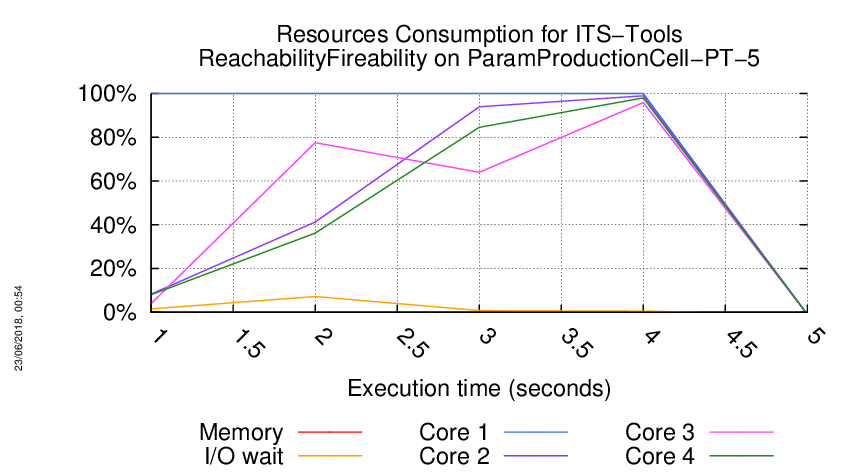
Execution Chart
We display below the execution chart for this examination (boot time has been removed).
Trace from the execution
Waiting for the VM to be ready (probing ssh)
...................
/home/mcc/execution
total 348K
-rw-r--r-- 1 mcc users 5.2K May 15 18:54 CTLCardinality.txt
-rw-r--r-- 1 mcc users 26K May 15 18:54 CTLCardinality.xml
-rw-r--r-- 1 mcc users 2.7K May 15 18:54 CTLFireability.txt
-rw-r--r-- 1 mcc users 15K May 15 18:54 CTLFireability.xml
-rw-r--r-- 1 mcc users 4.0K May 15 18:50 GenericPropertiesDefinition.xml
-rw-r--r-- 1 mcc users 5.8K May 15 18:50 GenericPropertiesVerdict.xml
-rw-r--r-- 1 mcc users 2.8K May 15 18:54 LTLCardinality.txt
-rw-r--r-- 1 mcc users 12K May 15 18:54 LTLCardinality.xml
-rw-r--r-- 1 mcc users 2.5K May 15 18:54 LTLFireability.txt
-rw-r--r-- 1 mcc users 12K May 15 18:54 LTLFireability.xml
-rw-r--r-- 1 mcc users 4.1K May 15 18:54 ReachabilityCardinality.txt
-rw-r--r-- 1 mcc users 18K May 15 18:54 ReachabilityCardinality.xml
-rw-r--r-- 1 mcc users 115 May 15 18:54 ReachabilityDeadlock.txt
-rw-r--r-- 1 mcc users 353 May 15 18:54 ReachabilityDeadlock.xml
-rw-r--r-- 1 mcc users 3.5K May 15 18:54 ReachabilityFireability.txt
-rw-r--r-- 1 mcc users 17K May 15 18:54 ReachabilityFireability.xml
-rw-r--r-- 1 mcc users 1.9K May 15 18:54 UpperBounds.txt
-rw-r--r-- 1 mcc users 3.9K May 15 18:54 UpperBounds.xml
-rw-r--r-- 1 mcc users 6 May 15 18:50 equiv_col
-rw-r--r-- 1 mcc users 2 May 15 18:50 instance
-rw-r--r-- 1 mcc users 6 May 15 18:50 iscolored
-rw-r--r-- 1 mcc users 167K May 15 18:50 model.pnml
=====================================================================
Generated by BenchKit 2-3637
Executing tool itstools
Input is ParamProductionCell-PT-5, examination is ReachabilityFireability
Time confinement is 3600 seconds
Memory confinement is 16384 MBytes
Number of cores is 4
Run identifier is r116-csrt-152666475300385
=====================================================================
--------------------
content from stdout:
=== Data for post analysis generated by BenchKit (invocation template)
The expected result is a vector of booleans
BOOL_VECTOR
here is the order used to build the result vector(from text file)
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityFireability-00
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityFireability-01
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityFireability-02
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityFireability-03
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityFireability-04
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityFireability-05
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityFireability-06
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityFireability-07
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityFireability-08
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityFireability-09
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityFireability-10
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityFireability-11
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityFireability-12
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityFireability-13
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityFireability-14
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityFireability-15
=== Now, execution of the tool begins
BK_START 1527176862597
Using solver Z3 to compute partial order matrices.
Built C files in :
/home/mcc/execution
Invoking ITS tools like this :CommandLine [args=[/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.201805151631/bin/its-reach-linux64, --gc-threshold, 2000000, --quiet, -i, /home/mcc/execution/ReachabilityFireability.pnml.gal, -t, CGAL, -reachable-file, ReachabilityFireability.prop, --nowitness], workingDir=/home/mcc/execution]
its-reach command run as :
/home/mcc/BenchKit/itstools/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.201805151631/bin/its-reach-linux64 --gc-threshold 2000000 --quiet -i /home/mcc/execution/ReachabilityFireability.pnml.gal -t CGAL -reachable-file ReachabilityFireability.prop --nowitness
Loading property file ReachabilityFireability.prop.
Read [invariant] property : ParamProductionCell-PT-5-ReachabilityFireability-00 with value :(!((A2U_ext_rs>=1)&&(arm2_forward>=1)))
Read [reachable] property : ParamProductionCell-PT-5-ReachabilityFireability-01 with value :(!(((!((A2U_rot1_run>=1)&&(arm2_release_angle>=1)))&&(((A2U_rot1_run>=1)&&(arm1_pick_up_angle>=1))&&(robot_right>=1)))||(!((arm2_stop>=1)&&(A2L_rotated>=1)))))
Read [reachable] property : ParamProductionCell-PT-5-ReachabilityFireability-02 with value :((((A1L_ret_run>=1)&&(arm1_pick_up_ext>=1))&&(arm1_backward>=1))||((A2L_rot1_in>=1)&&(robot_stop>=1)))
Read [reachable] property : ParamProductionCell-PT-5-ReachabilityFireability-03 with value :((A2L_loaded>=1)&&(arm2_stop>=1))
Read [reachable] property : ParamProductionCell-PT-5-ReachabilityFireability-04 with value :(((feed_belt_empty>=1)||((A1U_unloadet>=1)&&(arm1_stop>=1)))&&(((A2U_ret_run>=1)&&(arm2_retract_ext>=1))&&((table_stop_h>=1)&&(TU_in>=1))))
Read [invariant] property : ParamProductionCell-PT-5-ReachabilityFireability-05 with value :(((!((((A1U_rot1_run>=1)&&(arm1_pick_up_angle>=1))&&(robot_right>=1))||((A1U_ret_rs>=1)&&(arm1_backward>=1))))||(A1U_out>=1))||(((((A2U_rot1_run>=1)&&(arm2_release_angle>=1))||((A1L_rot2_run>=1)&&(arm1_pick_up_angle>=1)))||((((CU_lower_run>=1)&&(crane_lower>=1))&&(crane_transport_height>=1))||((arm2_waiting_for_swivel_2>=1)&&(swivel>=1))))||((belt2_stop>=1)&&(DB_in>=1))))
Read [invariant] property : ParamProductionCell-PT-5-ReachabilityFireability-06 with value :(!(((A1U_rot3_in>=1)&&(robot_stop>=1))&&(((CU_lift_run>=1)&&(crane_lift>=1))&&(crane_release_height>=1))))
Read [reachable] property : ParamProductionCell-PT-5-ReachabilityFireability-07 with value :(((!((DB_out>=1)||(((A2U_rot3_run>=1)&&(arm2_pick_up_angle>=1))&&(robot_right>=1))))&&((((A1L_ext_run>=1)&&(arm1_pick_up_ext>=1))||(PL_out>=1))&&(((arm1_store_free>=1)&&(ch_TA1_full>=1))||((PL_in>=1)&&(press_stop>=1)))))&&(((crane_stop_v>=1)&&(CL_loaded>=1))||((((A1L_rot3_rs>=1)&&(robot_left>=1))&&(((TU_lift_run>=1)&&(table_upward>=1))&&(table_bottom_pos>=1)))||((PU_out>=1)||((TL_rot_rs>=1)&&(table_right>=1))))))
Read [reachable] property : ParamProductionCell-PT-5-ReachabilityFireability-08 with value :(!(((!((A1U_rot2_run>=1)&&(arm1_release_angle>=1)))||((A1L_out>=1)||((A2L_rot2_rs>=1)&&(robot_left>=1))))||(((A1U_ext_run>=1)&&(arm1_release_ext>=1))||(((arm2_storing>=1)&&(ch_A2D_free>=1))||((crane_stop_v>=1)&&(CL_loaded>=1))))))
Read [reachable] property : ParamProductionCell-PT-5-ReachabilityFireability-09 with value :(((!(((A2L_rot3_rs>=1)&&(robot_left>=1))&&(((CU_trans_run>=1)&&(crane_to_belt2>=1))&&(crane_above_feed_belt>=1))))||(!(((A1U_rot3_run>=1)&&(arm1_release_angle>=1))&&(((TU_rot_run>=1)&&(table_right>=1))&&(table_load_angle>=1)))))&&((CU_trans_rs>=1)&&(crane_to_belt2>=1)))
Read [invariant] property : ParamProductionCell-PT-5-ReachabilityFireability-10 with value :(((((A2L_out>=1)||((PU_in>=1)&&(press_stop>=1)))&&(!(((CL_lower_run>=1)&&(crane_lower>=1))&&(crane_transport_height>=1))))||((((arm1_pick_up_angle>=1)&&(A1U_in>=1))||((crane_mag_off>=1)&&(CL_ready_to_grasp>=1)))||(((PL_in>=1)&&(press_stop>=1))&&((A2L_ext_run>=1)&&(arm2_pick_up_ext>=1)))))||((((A2U_rot1_run>=1)&&(arm1_pick_up_angle>=1))&&(robot_right>=1))||(!((((A1L_rot2_run>=1)&&(arm2_pick_up_angle>=1))&&(robot_left>=1))&&((A2U_ret_rs>=1)&&(arm2_backward>=1))))))
Read [reachable] property : ParamProductionCell-PT-5-ReachabilityFireability-11 with value :(((TL_lower_run>=1)&&(table_upward>=1))&&(table_top_pos>=1))
Read [reachable] property : ParamProductionCell-PT-5-ReachabilityFireability-12 with value :((A1U_unloadet>=1)&&(arm1_stop>=1))
Read [reachable] property : ParamProductionCell-PT-5-ReachabilityFireability-13 with value :((!(TL_out>=1))&&(((arm1_stop>=1)&&(A1L_rotated>=1))&&(((A2L_rot1_run>=1)&&(arm1_pick_up_angle>=1))&&(robot_left>=1))))
Read [reachable] property : ParamProductionCell-PT-5-ReachabilityFireability-14 with value :(((((table_stop_h>=1)&&(TL_in>=1))&&((((A1U_ext_run>=1)&&(arm1_retract_ext>=1))&&(arm1_forward>=1))&&((FB_trans_rs>=1)&&(belt1_start>=1))))&&(!(((A1L_rot2_in>=1)&&(robot_stop>=1))&&((FB_trans_run>=1)&&(belt1_light_barrier_true>=1)))))&&((!(((A1U_rot3_in>=1)&&(robot_stop>=1))&&((crane_stop_v>=1)&&(CU_in>=1))))&&(((((A2L_rot2_run>=1)&&(arm1_release_angle>=1))&&(robot_left>=1))||((A2L_rot3_run>=1)&&(arm2_pick_up_angle>=1)))||(!((crane_storing>=1)&&(ch_CF_free>=1))))))
Read [reachable] property : ParamProductionCell-PT-5-ReachabilityFireability-15 with value :((TL_lower_run>=1)&&(table_bottom_pos>=1))
Presburger conditions satisfied. Using coverability to approximate state space in K-Induction.
// Phase 1: matrix 202 rows 231 cols
invariant :table_bottom_pos + table_top_pos = 1
invariant :arm1_storing + arm1_having_swivel_1 + arm1_waiting_for_swivel_2 + A1L_out + A1L_loaded + arm1_magnet_off + A1L_ret_rs + A1L_ret_run + A1U_rotated + A1U_in + A1U_rot1_in + A1U_rot2_in + A1U_rot3_in + A1U_rot1_rs + A1U_rot1_run + A1U_rot2_rs + A1U_rot2_run + A1U_rot3_rs + A1U_rot3_run + A1U_extendet + A1U_ext_rs + A1U_ext_run = 1
invariant :ch_A1P_full + ch_A1P_free + press_ready_for_unloading + PU_out + blank_forged + PU_in + PU_lower_rs + PU_lower_run + forge_rs + forge_run + PL_in + PL_out + PL_lower_rs + PL_lower_run + -1'arm1_storing + -1'arm1_having_swivel_1 + -1'A1L_out + -1'A1L_loaded + -1'arm1_magnet_off + -1'A1L_ret_rs + -1'A1L_ret_run + A1U_out + A1U_unloadet + A1U_ret_rs + A1U_ret_run = 0
invariant :table_upward + -1'TL_lower_rs + -1'TL_lower_run + -1'TU_lift_rs + -1'TU_lift_run = 0
invariant :table_stop_v + TL_lower_rs + TL_lower_run + TU_lift_rs + TU_lift_run = 1
invariant :arm2_release_ext + arm2_retract_ext + arm2_pick_up_ext = 1
invariant :crane_store_free + crane_mag_on + CU_unloaded + CU_ready_to_transport + CU_out + CU_lift_rs + CU_lift_run + CU_trans_rs + CU_trans_run + CL_in + CL_ready_to_grasp + CL_lower_rs + CL_lower_run = 1
invariant :crane_transport_height + crane_release_height + crane_pick_up_height = 1
invariant :press_at_upper_pos + press_at_lower_pos + press_at_middle_pos = 1
invariant :crane_mag_off + crane_mag_on = 1
invariant :belt1_stop + FB_trans_rs + FB_trans_run + FB_deliver_rs + FB_deliver_run = 1
invariant :arm2_stop + A2U_ext_rs + A2U_ext_run + A2U_ret_rs + A2U_ret_run + A2L_ext_rs + A2L_ext_run + A2L_ret_rs + A2L_ret_run = 1
invariant :belt2_stop + DB_trans_rs + DB_trans_run + DB_deliver_rs + DB_deliver_run = 1
invariant :robot_right + -1'A2U_rot1_rs + -1'A2U_rot1_run + -1'A2U_rot3_rs + -1'A2U_rot3_run + -1'A1U_rot1_rs + -1'A1U_rot1_run + -1'A1U_rot2_rs + -1'A1U_rot2_run = 0
invariant :arm2_store_free + arm2_waiting_for_swivel_1 + arm2_having_swivel_2 + A2U_out + A2U_unloaded + arm2_magnet_on + A2U_ret_rs + A2U_ret_run + A2L_rotated + A2L_in + A2L_rot1_in + A2L_rot2_in + A2L_rot3_in + A2L_rot1_rs + A2L_rot1_run + A2L_rot2_rs + A2L_rot2_run + A2L_rot3_rs + A2L_rot3_run + A2L_extended + A2L_ext_rs + A2L_ext_run = 1
invariant :arm1_magnet_on + arm1_magnet_off = 1
invariant :deposit_belt_idle + deposit_belt_occupied + deposit_belt_empty + DB_in + DB_at_end + DB_out + DB_trans_rs + DB_trans_run + DB_deliver_rs + DB_deliver_run = 1
invariant :ch_CF_free + ch_CF_full + feed_belt_occupied + feed_belt_empty + FB_in + FB_at_end + FB_out + FB_trans_rs + FB_trans_run + FB_deliver_rs + FB_deliver_run + CU_unloaded + CU_ready_to_transport + CU_out + CU_ready_to_ungrasp + CU_in + CU_lift_rs + CU_lift_run + CU_trans_rs + CU_trans_run + CU_lower_rs + CU_lower_run = 1
invariant :press_up + -1'PL_lower_rs + -1'PL_lower_run = 0
invariant :ch_A2D_full + ch_A2D_free + deposit_belt_occupied + deposit_belt_empty + DB_in + DB_at_end + DB_out + DB_trans_rs + DB_trans_run + DB_deliver_rs + DB_deliver_run + -1'arm2_storing + -1'arm2_having_swivel_1 + A2U_out + A2U_unloaded + arm2_magnet_on + A2U_ret_rs + A2U_ret_run + -1'A2L_out + -1'A2L_loaded + -1'A2L_ret_rs + -1'A2L_ret_run = 1
invariant :belt2_start + -1'DB_trans_rs + -1'DB_trans_run + -1'DB_deliver_rs + -1'DB_deliver_run = 0
invariant :ch_DC_full + ch_CF_full + -1'ch_A1P_free + -1'ch_TA1_free + -1'ch_A2D_free + ch_FT_full + ch_PA2_full + -1'press_ready_for_unloading + -1'PL_in + -1'PL_out + -1'PL_lower_rs + -1'PL_lower_run + table_ready_for_unloading + TU_in + TU_out + table_at_unload_angle + TU_lift_rs + TU_lift_run + TU_rot_rs + TU_rot_run + -1'deposit_belt_empty + feed_belt_occupied + FB_in + FB_at_end + FB_out + FB_trans_rs + FB_trans_run + FB_deliver_rs + FB_deliver_run + -1'arm2_store_free + arm2_storing + -1'arm2_having_swivel_2 + arm2_having_swivel_1 + -1'A2U_out + -1'A2U_unloaded + -1'arm2_magnet_on + -1'A2U_ret_rs + -1'A2U_ret_run + A2L_out + A2L_loaded + A2L_ret_rs + A2L_ret_run + arm1_storing + arm1_having_swivel_1 + crane_mag_on + CU_unloaded + CU_ready_to_transport + CU_out + CU_lift_rs + CU_lift_run + CU_trans_rs + CU_trans_run + CL_in + CL_ready_to_grasp + CL_lower_rs + CL_lower_run = 2
invariant :arm1_forward + -1'A1L_ext_rs + -1'A1L_ext_run + -1'A1U_ext_rs + -1'A1U_ext_run = 0
invariant :arm2_forward + -1'A2U_ext_rs + -1'A2U_ext_run + -1'A2L_ext_rs + -1'A2L_ext_run = 0
invariant :press_stop + PU_lower_rs + PU_lower_run + forge_rs + forge_run + PL_lower_rs + PL_lower_run = 1
invariant :table_right + -1'TL_rot_rs + -1'TL_rot_run + -1'TU_rot_rs + -1'TU_rot_run = 0
invariant :robot_stop + A2U_rot1_rs + A2U_rot1_run + A2U_rot2_rs + A2U_rot2_run + A2U_rot3_rs + A2U_rot3_run + A2L_rot1_rs + A2L_rot1_run + A2L_rot2_rs + A2L_rot2_run + A2L_rot3_rs + A2L_rot3_run + A1L_rot1_rs + A1L_rot1_run + A1L_rot2_rs + A1L_rot2_run + A1L_rot3_rs + A1L_rot3_run + A1U_rot1_rs + A1U_rot1_run + A1U_rot2_rs + A1U_rot2_run + A1U_rot3_rs + A1U_rot3_run = 1
invariant :press_ready_for_loading + press_ready_for_unloading + PU_out + blank_forged + PU_in + PU_lower_rs + PU_lower_run + forge_rs + forge_run + PL_in + PL_out + PL_lower_rs + PL_lower_run = 1
invariant :ch_TA1_full + ch_TA1_free + -1'table_ready_for_unloading + -1'arm1_store_free + -1'arm1_having_swivel_2 + A1L_out + A1L_loaded + arm1_magnet_off + A1L_ret_rs + A1L_ret_run + -1'A1U_out + -1'A1U_unloadet + -1'A1U_ret_rs + -1'A1U_ret_run = 0
invariant :crane_to_belt2 + -1'CU_trans_rs + -1'CU_trans_run = 0
invariant :press_down + -1'PU_lower_rs + -1'PU_lower_run = 0
invariant :belt1_start + -1'FB_trans_rs + -1'FB_trans_run + -1'FB_deliver_rs + -1'FB_deliver_run = 0
invariant :arm1_store_free + arm1_waiting_for_swivel_1 + arm1_having_swivel_2 + A1L_rotated + A1L_in + A1L_rot1_in + A1L_rot2_in + A1L_rot3_in + A1L_rot1_rs + A1L_rot1_run + A1L_rot2_rs + A1L_rot2_run + A1L_rot3_rs + A1L_rot3_run + A1_extended + -1'arm1_magnet_off + A1L_ext_rs + A1L_ext_run + A1U_out + A1U_unloadet + A1U_ret_rs + A1U_ret_run = 0
invariant :table_ready_for_loading + table_ready_for_unloading + TL_out + TL_in + table_at_load_angle + TL_rot_rs + TL_rot_run + TL_lower_rs + TL_lower_run + TU_in + TU_out + table_at_unload_angle + TU_lift_rs + TU_lift_run + TU_rot_rs + TU_rot_run = 1
invariant :crane_to_belt1 + -1'CL_trans_rs + -1'CL_trans_run = 0
invariant :crane_stop_h + CU_trans_rs + CU_trans_run + CL_trans_rs + CL_trans_run = 1
invariant :crane_lift + -1'CU_lift_rs + -1'CU_lift_run + -1'CL_lift_rs + -1'CL_lift_run = 0
invariant :robot_left + -1'A2U_rot2_rs + -1'A2U_rot2_run + -1'A2L_rot1_rs + -1'A2L_rot1_run + -1'A2L_rot2_rs + -1'A2L_rot2_run + -1'A2L_rot3_rs + -1'A2L_rot3_run + -1'A1L_rot1_rs + -1'A1L_rot1_run + -1'A1L_rot2_rs + -1'A1L_rot2_run + -1'A1L_rot3_rs + -1'A1L_rot3_run + -1'A1U_rot3_rs + -1'A1U_rot3_run = 0
invariant :arm1_stop + A1L_ext_rs + A1L_ext_run + A1L_ret_rs + A1L_ret_run + A1U_ext_rs + A1U_ext_run + A1U_ret_rs + A1U_ret_run = 1
invariant :table_stop_h + TL_rot_rs + TL_rot_run + TU_rot_rs + TU_rot_run = 1
invariant :feed_belt_idle + feed_belt_occupied + feed_belt_empty + FB_in + FB_at_end + FB_out + FB_trans_rs + FB_trans_run + FB_deliver_rs + FB_deliver_run = 1
invariant :arm2_magnet_off + arm2_magnet_on = 1
invariant :arm2_backward + -1'A2U_ret_rs + -1'A2U_ret_run + -1'A2L_ret_rs + -1'A2L_ret_run = 0
invariant :crane_above_deposit_belt + crane_above_feed_belt = 1
invariant :crane_storing + -1'crane_mag_on + CU_ready_to_ungrasp + CU_in + CU_lower_rs + CU_lower_run + CL_out + CL_ready_to_transport + CL_loaded + CL_trans_rs + CL_trans_run + CL_lift_rs + CL_lift_run = 0
invariant :crane_lower + -1'CU_lower_rs + -1'CU_lower_run + -1'CL_lower_rs + -1'CL_lower_run = 0
invariant :crane_stop_v + CU_lift_rs + CU_lift_run + CU_lower_rs + CU_lower_run + CL_lower_rs + CL_lower_run + CL_lift_rs + CL_lift_run = 1
invariant :swivel + -1'arm2_store_free + -1'arm2_waiting_for_swivel_1 + -1'arm2_storing + -1'arm2_waiting_for_swivel_2 + -1'arm1_store_free + -1'arm1_waiting_for_swivel_1 + -1'arm1_storing + -1'arm1_waiting_for_swivel_2 = -1
invariant :belt2_light_barrier_true + belt2_light_barrier_false = 1
invariant :arm2_storing + arm2_having_swivel_1 + arm2_waiting_for_swivel_2 + A2U_rotated + A2U_in + A2U_rot1_in + A2U_rot2_in + A2U_rot3_in + A2U_rot1_rs + A2U_rot1_run + A2U_rot2_rs + A2U_rot2_run + A2U_rot3_rs + A2U_rot3_run + A2U_extended + -1'arm2_magnet_on + A2U_ext_rs + A2U_ext_run + A2L_out + A2L_loaded + A2L_ret_rs + A2L_ret_run = 0
invariant :arm2_release_angle + arm1_pick_up_angle + arm1_release_angle + arm2_pick_up_angle = 1
invariant :ch_DC_free + -1'ch_CF_full + ch_A1P_free + ch_TA1_free + ch_A2D_free + -1'ch_FT_full + -1'ch_PA2_full + press_ready_for_unloading + PL_in + PL_out + PL_lower_rs + PL_lower_run + -1'table_ready_for_unloading + -1'TU_in + -1'TU_out + -1'table_at_unload_angle + -1'TU_lift_rs + -1'TU_lift_run + -1'TU_rot_rs + -1'TU_rot_run + deposit_belt_empty + DB_in + DB_at_end + DB_out + DB_trans_rs + DB_trans_run + DB_deliver_rs + DB_deliver_run + -1'feed_belt_occupied + -1'FB_in + -1'FB_at_end + -1'FB_out + -1'FB_trans_rs + -1'FB_trans_run + -1'FB_deliver_rs + -1'FB_deliver_run + arm2_store_free + -1'arm2_storing + arm2_having_swivel_2 + -1'arm2_having_swivel_1 + A2U_out + A2U_unloaded + arm2_magnet_on + A2U_ret_rs + A2U_ret_run + -1'A2L_out + -1'A2L_loaded + -1'A2L_ret_rs + -1'A2L_ret_run + -1'arm1_storing + -1'arm1_having_swivel_1 + -1'crane_mag_on + -1'CU_unloaded + -1'CU_ready_to_transport + -1'CU_out + -1'CU_lift_rs + -1'CU_lift_run + -1'CU_trans_rs + -1'CU_trans_run + CL_out + CL_ready_to_transport + CL_loaded + CL_trans_rs + CL_trans_run + CL_lift_rs + CL_lift_run = -1
invariant :ch_FT_free + ch_FT_full + table_ready_for_unloading + TL_out + TL_in + table_at_load_angle + TL_rot_rs + TL_rot_run + TL_lower_rs + TL_lower_run + TU_in + TU_out + table_at_unload_angle + TU_lift_rs + TU_lift_run + TU_rot_rs + TU_rot_run + FB_in + FB_at_end + FB_out + FB_trans_rs + FB_trans_run + FB_deliver_rs + FB_deliver_run = 1
invariant :ch_PA2_free + ch_PA2_full + -1'press_ready_for_unloading + -1'arm2_store_free + -1'arm2_having_swivel_2 + -1'A2U_out + -1'A2U_unloaded + -1'arm2_magnet_on + -1'A2U_ret_rs + -1'A2U_ret_run + A2L_out + A2L_loaded + A2L_ret_rs + A2L_ret_run = -1
invariant :table_load_angle + table_unload_angle = 1
invariant :arm1_pick_up_ext + arm1_retract_ext + arm1_release_ext = 1
invariant :arm1_backward + -1'A1L_ret_rs + -1'A1L_ret_run + -1'A1U_ret_rs + -1'A1U_ret_run = 0
invariant :belt1_light_barrier_true + belt1_light_barrier_false = 1
invariant :press_upward + -1'forge_rs + -1'forge_run = 0
Presburger conditions satisfied. Using coverability to approximate state space in K-Induction.
// Phase 1: matrix 202 rows 231 cols
invariant :table_bottom_pos + table_top_pos = 1
invariant :arm1_storing + arm1_having_swivel_1 + arm1_waiting_for_swivel_2 + A1L_out + A1L_loaded + arm1_magnet_off + A1L_ret_rs + A1L_ret_run + A1U_rotated + A1U_in + A1U_rot1_in + A1U_rot2_in + A1U_rot3_in + A1U_rot1_rs + A1U_rot1_run + A1U_rot2_rs + A1U_rot2_run + A1U_rot3_rs + A1U_rot3_run + A1U_extendet + A1U_ext_rs + A1U_ext_run = 1
invariant :ch_A1P_full + ch_A1P_free + press_ready_for_unloading + PU_out + blank_forged + PU_in + PU_lower_rs + PU_lower_run + forge_rs + forge_run + PL_in + PL_out + PL_lower_rs + PL_lower_run + -1'arm1_storing + -1'arm1_having_swivel_1 + -1'A1L_out + -1'A1L_loaded + -1'arm1_magnet_off + -1'A1L_ret_rs + -1'A1L_ret_run + A1U_out + A1U_unloadet + A1U_ret_rs + A1U_ret_run = 0
invariant :table_upward + -1'TL_lower_rs + -1'TL_lower_run + -1'TU_lift_rs + -1'TU_lift_run = 0
invariant :table_stop_v + TL_lower_rs + TL_lower_run + TU_lift_rs + TU_lift_run = 1
invariant :arm2_release_ext + arm2_retract_ext + arm2_pick_up_ext = 1
invariant :crane_store_free + crane_mag_on + CU_unloaded + CU_ready_to_transport + CU_out + CU_lift_rs + CU_lift_run + CU_trans_rs + CU_trans_run + CL_in + CL_ready_to_grasp + CL_lower_rs + CL_lower_run = 1
invariant :crane_transport_height + crane_release_height + crane_pick_up_height = 1
invariant :press_at_upper_pos + press_at_lower_pos + press_at_middle_pos = 1
invariant :crane_mag_off + crane_mag_on = 1
invariant :belt1_stop + FB_trans_rs + FB_trans_run + FB_deliver_rs + FB_deliver_run = 1
invariant :arm2_stop + A2U_ext_rs + A2U_ext_run + A2U_ret_rs + A2U_ret_run + A2L_ext_rs + A2L_ext_run + A2L_ret_rs + A2L_ret_run = 1
invariant :belt2_stop + DB_trans_rs + DB_trans_run + DB_deliver_rs + DB_deliver_run = 1
invariant :robot_right + -1'A2U_rot1_rs + -1'A2U_rot1_run + -1'A2U_rot3_rs + -1'A2U_rot3_run + -1'A1U_rot1_rs + -1'A1U_rot1_run + -1'A1U_rot2_rs + -1'A1U_rot2_run = 0
invariant :arm2_store_free + arm2_waiting_for_swivel_1 + arm2_having_swivel_2 + A2U_out + A2U_unloaded + arm2_magnet_on + A2U_ret_rs + A2U_ret_run + A2L_rotated + A2L_in + A2L_rot1_in + A2L_rot2_in + A2L_rot3_in + A2L_rot1_rs + A2L_rot1_run + A2L_rot2_rs + A2L_rot2_run + A2L_rot3_rs + A2L_rot3_run + A2L_extended + A2L_ext_rs + A2L_ext_run = 1
invariant :arm1_magnet_on + arm1_magnet_off = 1
invariant :deposit_belt_idle + deposit_belt_occupied + deposit_belt_empty + DB_in + DB_at_end + DB_out + DB_trans_rs + DB_trans_run + DB_deliver_rs + DB_deliver_run = 1
invariant :ch_CF_free + ch_CF_full + feed_belt_occupied + feed_belt_empty + FB_in + FB_at_end + FB_out + FB_trans_rs + FB_trans_run + FB_deliver_rs + FB_deliver_run + CU_unloaded + CU_ready_to_transport + CU_out + CU_ready_to_ungrasp + CU_in + CU_lift_rs + CU_lift_run + CU_trans_rs + CU_trans_run + CU_lower_rs + CU_lower_run = 1
invariant :press_up + -1'PL_lower_rs + -1'PL_lower_run = 0
invariant :ch_A2D_full + ch_A2D_free + deposit_belt_occupied + deposit_belt_empty + DB_in + DB_at_end + DB_out + DB_trans_rs + DB_trans_run + DB_deliver_rs + DB_deliver_run + -1'arm2_storing + -1'arm2_having_swivel_1 + A2U_out + A2U_unloaded + arm2_magnet_on + A2U_ret_rs + A2U_ret_run + -1'A2L_out + -1'A2L_loaded + -1'A2L_ret_rs + -1'A2L_ret_run = 1
invariant :belt2_start + -1'DB_trans_rs + -1'DB_trans_run + -1'DB_deliver_rs + -1'DB_deliver_run = 0
invariant :ch_DC_full + ch_CF_full + -1'ch_A1P_free + -1'ch_TA1_free + -1'ch_A2D_free + ch_FT_full + ch_PA2_full + -1'press_ready_for_unloading + -1'PL_in + -1'PL_out + -1'PL_lower_rs + -1'PL_lower_run + table_ready_for_unloading + TU_in + TU_out + table_at_unload_angle + TU_lift_rs + TU_lift_run + TU_rot_rs + TU_rot_run + -1'deposit_belt_empty + feed_belt_occupied + FB_in + FB_at_end + FB_out + FB_trans_rs + FB_trans_run + FB_deliver_rs + FB_deliver_run + -1'arm2_store_free + arm2_storing + -1'arm2_having_swivel_2 + arm2_having_swivel_1 + -1'A2U_out + -1'A2U_unloaded + -1'arm2_magnet_on + -1'A2U_ret_rs + -1'A2U_ret_run + A2L_out + A2L_loaded + A2L_ret_rs + A2L_ret_run + arm1_storing + arm1_having_swivel_1 + crane_mag_on + CU_unloaded + CU_ready_to_transport + CU_out + CU_lift_rs + CU_lift_run + CU_trans_rs + CU_trans_run + CL_in + CL_ready_to_grasp + CL_lower_rs + CL_lower_run = 2
invariant :arm1_forward + -1'A1L_ext_rs + -1'A1L_ext_run + -1'A1U_ext_rs + -1'A1U_ext_run = 0
invariant :arm2_forward + -1'A2U_ext_rs + -1'A2U_ext_run + -1'A2L_ext_rs + -1'A2L_ext_run = 0
invariant :press_stop + PU_lower_rs + PU_lower_run + forge_rs + forge_run + PL_lower_rs + PL_lower_run = 1
invariant :table_right + -1'TL_rot_rs + -1'TL_rot_run + -1'TU_rot_rs + -1'TU_rot_run = 0
invariant :robot_stop + A2U_rot1_rs + A2U_rot1_run + A2U_rot2_rs + A2U_rot2_run + A2U_rot3_rs + A2U_rot3_run + A2L_rot1_rs + A2L_rot1_run + A2L_rot2_rs + A2L_rot2_run + A2L_rot3_rs + A2L_rot3_run + A1L_rot1_rs + A1L_rot1_run + A1L_rot2_rs + A1L_rot2_run + A1L_rot3_rs + A1L_rot3_run + A1U_rot1_rs + A1U_rot1_run + A1U_rot2_rs + A1U_rot2_run + A1U_rot3_rs + A1U_rot3_run = 1
invariant :press_ready_for_loading + press_ready_for_unloading + PU_out + blank_forged + PU_in + PU_lower_rs + PU_lower_run + forge_rs + forge_run + PL_in + PL_out + PL_lower_rs + PL_lower_run = 1
invariant :ch_TA1_full + ch_TA1_free + -1'table_ready_for_unloading + -1'arm1_store_free + -1'arm1_having_swivel_2 + A1L_out + A1L_loaded + arm1_magnet_off + A1L_ret_rs + A1L_ret_run + -1'A1U_out + -1'A1U_unloadet + -1'A1U_ret_rs + -1'A1U_ret_run = 0
invariant :crane_to_belt2 + -1'CU_trans_rs + -1'CU_trans_run = 0
invariant :press_down + -1'PU_lower_rs + -1'PU_lower_run = 0
invariant :belt1_start + -1'FB_trans_rs + -1'FB_trans_run + -1'FB_deliver_rs + -1'FB_deliver_run = 0
invariant :arm1_store_free + arm1_waiting_for_swivel_1 + arm1_having_swivel_2 + A1L_rotated + A1L_in + A1L_rot1_in + A1L_rot2_in + A1L_rot3_in + A1L_rot1_rs + A1L_rot1_run + A1L_rot2_rs + A1L_rot2_run + A1L_rot3_rs + A1L_rot3_run + A1_extended + -1'arm1_magnet_off + A1L_ext_rs + A1L_ext_run + A1U_out + A1U_unloadet + A1U_ret_rs + A1U_ret_run = 0
invariant :table_ready_for_loading + table_ready_for_unloading + TL_out + TL_in + table_at_load_angle + TL_rot_rs + TL_rot_run + TL_lower_rs + TL_lower_run + TU_in + TU_out + table_at_unload_angle + TU_lift_rs + TU_lift_run + TU_rot_rs + TU_rot_run = 1
invariant :crane_to_belt1 + -1'CL_trans_rs + -1'CL_trans_run = 0
invariant :crane_stop_h + CU_trans_rs + CU_trans_run + CL_trans_rs + CL_trans_run = 1
invariant :crane_lift + -1'CU_lift_rs + -1'CU_lift_run + -1'CL_lift_rs + -1'CL_lift_run = 0
invariant :robot_left + -1'A2U_rot2_rs + -1'A2U_rot2_run + -1'A2L_rot1_rs + -1'A2L_rot1_run + -1'A2L_rot2_rs + -1'A2L_rot2_run + -1'A2L_rot3_rs + -1'A2L_rot3_run + -1'A1L_rot1_rs + -1'A1L_rot1_run + -1'A1L_rot2_rs + -1'A1L_rot2_run + -1'A1L_rot3_rs + -1'A1L_rot3_run + -1'A1U_rot3_rs + -1'A1U_rot3_run = 0
invariant :arm1_stop + A1L_ext_rs + A1L_ext_run + A1L_ret_rs + A1L_ret_run + A1U_ext_rs + A1U_ext_run + A1U_ret_rs + A1U_ret_run = 1
invariant :table_stop_h + TL_rot_rs + TL_rot_run + TU_rot_rs + TU_rot_run = 1
invariant :feed_belt_idle + feed_belt_occupied + feed_belt_empty + FB_in + FB_at_end + FB_out + FB_trans_rs + FB_trans_run + FB_deliver_rs + FB_deliver_run = 1
invariant :arm2_magnet_off + arm2_magnet_on = 1
invariant :arm2_backward + -1'A2U_ret_rs + -1'A2U_ret_run + -1'A2L_ret_rs + -1'A2L_ret_run = 0
invariant :crane_above_deposit_belt + crane_above_feed_belt = 1
invariant :crane_storing + -1'crane_mag_on + CU_ready_to_ungrasp + CU_in + CU_lower_rs + CU_lower_run + CL_out + CL_ready_to_transport + CL_loaded + CL_trans_rs + CL_trans_run + CL_lift_rs + CL_lift_run = 0
invariant :crane_lower + -1'CU_lower_rs + -1'CU_lower_run + -1'CL_lower_rs + -1'CL_lower_run = 0
invariant :crane_stop_v + CU_lift_rs + CU_lift_run + CU_lower_rs + CU_lower_run + CL_lower_rs + CL_lower_run + CL_lift_rs + CL_lift_run = 1
invariant :swivel + -1'arm2_store_free + -1'arm2_waiting_for_swivel_1 + -1'arm2_storing + -1'arm2_waiting_for_swivel_2 + -1'arm1_store_free + -1'arm1_waiting_for_swivel_1 + -1'arm1_storing + -1'arm1_waiting_for_swivel_2 = -1
invariant :belt2_light_barrier_true + belt2_light_barrier_false = 1
invariant :arm2_storing + arm2_having_swivel_1 + arm2_waiting_for_swivel_2 + A2U_rotated + A2U_in + A2U_rot1_in + A2U_rot2_in + A2U_rot3_in + A2U_rot1_rs + A2U_rot1_run + A2U_rot2_rs + A2U_rot2_run + A2U_rot3_rs + A2U_rot3_run + A2U_extended + -1'arm2_magnet_on + A2U_ext_rs + A2U_ext_run + A2L_out + A2L_loaded + A2L_ret_rs + A2L_ret_run = 0
invariant :arm2_release_angle + arm1_pick_up_angle + arm1_release_angle + arm2_pick_up_angle = 1
invariant :ch_DC_free + -1'ch_CF_full + ch_A1P_free + ch_TA1_free + ch_A2D_free + -1'ch_FT_full + -1'ch_PA2_full + press_ready_for_unloading + PL_in + PL_out + PL_lower_rs + PL_lower_run + -1'table_ready_for_unloading + -1'TU_in + -1'TU_out + -1'table_at_unload_angle + -1'TU_lift_rs + -1'TU_lift_run + -1'TU_rot_rs + -1'TU_rot_run + deposit_belt_empty + DB_in + DB_at_end + DB_out + DB_trans_rs + DB_trans_run + DB_deliver_rs + DB_deliver_run + -1'feed_belt_occupied + -1'FB_in + -1'FB_at_end + -1'FB_out + -1'FB_trans_rs + -1'FB_trans_run + -1'FB_deliver_rs + -1'FB_deliver_run + arm2_store_free + -1'arm2_storing + arm2_having_swivel_2 + -1'arm2_having_swivel_1 + A2U_out + A2U_unloaded + arm2_magnet_on + A2U_ret_rs + A2U_ret_run + -1'A2L_out + -1'A2L_loaded + -1'A2L_ret_rs + -1'A2L_ret_run + -1'arm1_storing + -1'arm1_having_swivel_1 + -1'crane_mag_on + -1'CU_unloaded + -1'CU_ready_to_transport + -1'CU_out + -1'CU_lift_rs + -1'CU_lift_run + -1'CU_trans_rs + -1'CU_trans_run + CL_out + CL_ready_to_transport + CL_loaded + CL_trans_rs + CL_trans_run + CL_lift_rs + CL_lift_run = -1
invariant :ch_FT_free + ch_FT_full + table_ready_for_unloading + TL_out + TL_in + table_at_load_angle + TL_rot_rs + TL_rot_run + TL_lower_rs + TL_lower_run + TU_in + TU_out + table_at_unload_angle + TU_lift_rs + TU_lift_run + TU_rot_rs + TU_rot_run + FB_in + FB_at_end + FB_out + FB_trans_rs + FB_trans_run + FB_deliver_rs + FB_deliver_run = 1
invariant :ch_PA2_free + ch_PA2_full + -1'press_ready_for_unloading + -1'arm2_store_free + -1'arm2_having_swivel_2 + -1'A2U_out + -1'A2U_unloaded + -1'arm2_magnet_on + -1'A2U_ret_rs + -1'A2U_ret_run + A2L_out + A2L_loaded + A2L_ret_rs + A2L_ret_run = -1
invariant :table_load_angle + table_unload_angle = 1
invariant :arm1_pick_up_ext + arm1_retract_ext + arm1_release_ext = 1
invariant :arm1_backward + -1'A1L_ret_rs + -1'A1L_ret_run + -1'A1U_ret_rs + -1'A1U_ret_run = 0
invariant :belt1_light_barrier_true + belt1_light_barrier_false = 1
invariant :press_upward + -1'forge_rs + -1'forge_run = 0
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
ParamProductionCell\_PT\_5\_flat\_flat,1.65724e+06,0.744214,27880,2,14159,5,102379,6,0,1129,79884,0
Total reachable state count : 1657242
Verifying 16 reachability properties.
Invariant property ParamProductionCell-PT-5-ReachabilityFireability-00 does not hold.
FORMULA ParamProductionCell-PT-5-ReachabilityFireability-00 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL COLLATERAL_PROCESSING
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
ParamProductionCell-PT-5-ReachabilityFireability-00,1,0.746364,28044,2,232,6,102379,7,0,1133,79884,0
Reachability property ParamProductionCell-PT-5-ReachabilityFireability-01 is true.
FORMULA ParamProductionCell-PT-5-ReachabilityFireability-01 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL COLLATERAL_PROCESSING
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
ParamProductionCell-PT-5-ReachabilityFireability-01,1,0.750532,28148,2,232,7,102379,8,0,1146,79884,0
Reachability property ParamProductionCell-PT-5-ReachabilityFireability-02 is true.
FORMULA ParamProductionCell-PT-5-ReachabilityFireability-02 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL COLLATERAL_PROCESSING
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
ParamProductionCell-PT-5-ReachabilityFireability-02,1,0.753765,28148,2,232,8,102379,9,0,1151,79884,0
Reachability property ParamProductionCell-PT-5-ReachabilityFireability-03 is true.
FORMULA ParamProductionCell-PT-5-ReachabilityFireability-03 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL COLLATERAL_PROCESSING
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
ParamProductionCell-PT-5-ReachabilityFireability-03,1,0.757574,28148,2,232,9,102379,10,0,1153,79884,0
Reachability property ParamProductionCell-PT-5-ReachabilityFireability-04 is true.
FORMULA ParamProductionCell-PT-5-ReachabilityFireability-04 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL COLLATERAL_PROCESSING
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
ParamProductionCell-PT-5-ReachabilityFireability-04,195,0.765968,28148,2,1156,10,102379,11,0,1164,79884,0
Invariant property ParamProductionCell-PT-5-ReachabilityFireability-05 does not hold.
FORMULA ParamProductionCell-PT-5-ReachabilityFireability-05 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL COLLATERAL_PROCESSING
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
ParamProductionCell-PT-5-ReachabilityFireability-05,240,0.772707,28148,2,928,11,102379,12,0,1206,79884,0
Invariant property ParamProductionCell-PT-5-ReachabilityFireability-06 does not hold.
FORMULA ParamProductionCell-PT-5-ReachabilityFireability-06 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL COLLATERAL_PROCESSING
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
ParamProductionCell-PT-5-ReachabilityFireability-06,1,0.777382,28148,2,232,12,102379,13,0,1214,79884,0
Reachability property ParamProductionCell-PT-5-ReachabilityFireability-07 is true.
FORMULA ParamProductionCell-PT-5-ReachabilityFireability-07 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL COLLATERAL_PROCESSING
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
ParamProductionCell-PT-5-ReachabilityFireability-07,12,0.809923,28148,2,547,13,102379,14,0,1257,79884,0
Reachability property ParamProductionCell-PT-5-ReachabilityFireability-08 is true.
FORMULA ParamProductionCell-PT-5-ReachabilityFireability-08 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL COLLATERAL_PROCESSING
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
ParamProductionCell-PT-5-ReachabilityFireability-08,31,0.815734,28160,2,439,14,102379,15,0,1287,79884,0
Reachability property ParamProductionCell-PT-5-ReachabilityFireability-09 is true.
FORMULA ParamProductionCell-PT-5-ReachabilityFireability-09 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL COLLATERAL_PROCESSING
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
ParamProductionCell-PT-5-ReachabilityFireability-09,8,0.817256,28160,2,329,15,102379,16,0,1302,79884,0
Invariant property ParamProductionCell-PT-5-ReachabilityFireability-10 is true.
FORMULA ParamProductionCell-PT-5-ReachabilityFireability-10 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL COLLATERAL_PROCESSING
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
ParamProductionCell-PT-5-ReachabilityFireability-10,0,0.842672,28160,1,0,15,102379,17,0,1338,79884,0
Reachability property ParamProductionCell-PT-5-ReachabilityFireability-11 is true.
FORMULA ParamProductionCell-PT-5-ReachabilityFireability-11 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL COLLATERAL_PROCESSING
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
ParamProductionCell-PT-5-ReachabilityFireability-11,34592,0.844947,28160,2,5508,16,102379,18,0,1341,79884,0
Reachability property ParamProductionCell-PT-5-ReachabilityFireability-12 is true.
FORMULA ParamProductionCell-PT-5-ReachabilityFireability-12 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL COLLATERAL_PROCESSING
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
ParamProductionCell-PT-5-ReachabilityFireability-12,1,0.846011,28160,2,232,17,102379,19,0,1343,79884,0
Reachability property ParamProductionCell-PT-5-ReachabilityFireability-13 does not hold.
FORMULA ParamProductionCell-PT-5-ReachabilityFireability-13 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL COLLATERAL_PROCESSING
No reachable states exhibit your property : ParamProductionCell-PT-5-ReachabilityFireability-13
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
ParamProductionCell-PT-5-ReachabilityFireability-13,0,0.859612,28160,1,0,17,102379,20,0,1352,79884,0
Reachability property ParamProductionCell-PT-5-ReachabilityFireability-14 does not hold.
FORMULA ParamProductionCell-PT-5-ReachabilityFireability-14 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL COLLATERAL_PROCESSING
No reachable states exhibit your property : ParamProductionCell-PT-5-ReachabilityFireability-14
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
ParamProductionCell-PT-5-ReachabilityFireability-14,0,0.873786,28160,1,0,17,102379,21,0,1377,79884,0
Reachability property ParamProductionCell-PT-5-ReachabilityFireability-15 is true.
FORMULA ParamProductionCell-PT-5-ReachabilityFireability-15 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL COLLATERAL_PROCESSING
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
ParamProductionCell-PT-5-ReachabilityFireability-15,34592,0.876046,28160,2,5508,18,102379,22,0,1378,79884,0
ITS tools runner thread asked to quit. Dying gracefully.
Running compilation step : CommandLine [args=[gcc, -c, -I/home/mcc/BenchKit//lts_install_dir//include, -I., -std=c99, -fPIC, -O3, model.c], workingDir=/home/mcc/execution]
WARNING : LTS min runner thread was asked to interrupt. Dying gracefully.
BK_STOP 1527176866083
--------------------
content from stderr:
+ export BINDIR=/home/mcc/BenchKit/
+ BINDIR=/home/mcc/BenchKit/
++ pwd
+ export MODEL=/home/mcc/execution
+ MODEL=/home/mcc/execution
+ /home/mcc/BenchKit//runeclipse.sh /home/mcc/execution ReachabilityFireability -its -ltsminpath /home/mcc/BenchKit//lts_install_dir/ -smt
+ ulimit -s 65536
+ [[ -z '' ]]
+ export LTSMIN_MEM_SIZE=8589934592
+ LTSMIN_MEM_SIZE=8589934592
+ /home/mcc/BenchKit//itstools/its-tools -consoleLog -data /home/mcc/execution/workspace -pnfolder /home/mcc/execution -examination ReachabilityFireability -z3path /home/mcc/BenchKit//z3/bin/z3 -yices2path /home/mcc/BenchKit//yices/bin/yices -its -ltsminpath /home/mcc/BenchKit//lts_install_dir/ -smt -vmargs -Dosgi.locking=none -Declipse.stateSaveDelayInterval=-1 -Dosgi.configuration.area=/tmp/.eclipse -Xss8m -Xms40m -Xmx8192m -Dfile.encoding=UTF-8 -Dosgi.requiredJavaVersion=1.6
May 24, 2018 3:47:44 PM fr.lip6.move.gal.application.Application start
INFO: Running its-tools with arguments : [-pnfolder, /home/mcc/execution, -examination, ReachabilityFireability, -z3path, /home/mcc/BenchKit//z3/bin/z3, -yices2path, /home/mcc/BenchKit//yices/bin/yices, -its, -ltsminpath, /home/mcc/BenchKit//lts_install_dir/, -smt]
May 24, 2018 3:47:44 PM fr.lip6.move.gal.application.MccTranslator transformPNML
INFO: Parsing pnml file : /home/mcc/execution/model.pnml
May 24, 2018 3:47:44 PM fr.lip6.move.gal.nupn.PTNetReader loadFromXML
INFO: Load time of PNML (sax parser for PT used): 69 ms
May 24, 2018 3:47:44 PM fr.lip6.move.gal.pnml.togal.PTGALTransformer handlePage
INFO: Transformed 231 places.
May 24, 2018 3:47:44 PM fr.lip6.move.gal.pnml.togal.PTGALTransformer handlePage
INFO: Transformed 202 transitions.
May 24, 2018 3:47:44 PM fr.lip6.move.serialization.SerializationUtil systemToFile
INFO: Time to serialize gal into /home/mcc/execution/model.pnml.img.gal : 16 ms
May 24, 2018 3:47:44 PM fr.lip6.move.gal.instantiate.GALRewriter flatten
INFO: Flatten gal took : 69 ms
May 24, 2018 3:47:44 PM fr.lip6.move.gal.instantiate.GALRewriter flatten
INFO: Flatten gal took : 72 ms
May 24, 2018 3:47:44 PM fr.lip6.move.gal.instantiate.GALRewriter flatten
INFO: Flatten gal took : 82 ms
May 24, 2018 3:47:44 PM fr.lip6.move.serialization.SerializationUtil systemToFile
INFO: Time to serialize gal into /home/mcc/execution/ReachabilityFireability.pnml.gal : 30 ms
May 24, 2018 3:47:44 PM fr.lip6.move.serialization.SerializationUtil serializePropertiesForITSTools
INFO: Time to serialize properties into /home/mcc/execution/ReachabilityFireability.prop : 2 ms
May 24, 2018 3:47:44 PM fr.lip6.move.gal.semantics.DeterministicNextBuilder getDeterministicNext
INFO: Input system was already deterministic with 202 transitions.
May 24, 2018 3:47:44 PM fr.lip6.move.gal.semantics.DeterministicNextBuilder getDeterministicNext
INFO: Input system was already deterministic with 202 transitions.
May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2smt.bmc.KInductionSolver computeAndDeclareInvariants
INFO: Computed 59 place invariants in 72 ms
May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd checkProperties
INFO: Ran tautology test, simplified 0 / 16 in 572 ms.
May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd runBMC
INFO: BMC solution for property ParamProductionCell-PT-5-ReachabilityFireability-00(UNSAT) depth K=0 took 16 ms
May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd runBMC
INFO: BMC solution for property ParamProductionCell-PT-5-ReachabilityFireability-01(UNSAT) depth K=0 took 7 ms
May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd runBMC
INFO: BMC solution for property ParamProductionCell-PT-5-ReachabilityFireability-02(UNSAT) depth K=0 took 8 ms
May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd runBMC
INFO: BMC solution for property ParamProductionCell-PT-5-ReachabilityFireability-03(UNSAT) depth K=0 took 4 ms
May 24, 2018 3:47:45 PM fr.lip6.move.gal.semantics.DeterministicNextBuilder getDeterministicNext
INFO: Input system was already deterministic with 202 transitions.
May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd runBMC
INFO: BMC solution for property ParamProductionCell-PT-5-ReachabilityFireability-04(UNSAT) depth K=0 took 12 ms
May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd runBMC
INFO: BMC solution for property ParamProductionCell-PT-5-ReachabilityFireability-05(UNSAT) depth K=0 took 5 ms
May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd runBMC
INFO: BMC solution for property ParamProductionCell-PT-5-ReachabilityFireability-06(UNSAT) depth K=0 took 4 ms
May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd runBMC
INFO: BMC solution for property ParamProductionCell-PT-5-ReachabilityFireability-07(UNSAT) depth K=0 took 1 ms
May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd runBMC
INFO: BMC solution for property ParamProductionCell-PT-5-ReachabilityFireability-08(UNSAT) depth K=0 took 1 ms
May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd runBMC
INFO: BMC solution for property ParamProductionCell-PT-5-ReachabilityFireability-09(UNSAT) depth K=0 took 9 ms
May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd runBMC
INFO: BMC solution for property ParamProductionCell-PT-5-ReachabilityFireability-10(UNSAT) depth K=0 took 1 ms
May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd runBMC
INFO: BMC solution for property ParamProductionCell-PT-5-ReachabilityFireability-11(UNSAT) depth K=0 took 1 ms
May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd runBMC
INFO: BMC solution for property ParamProductionCell-PT-5-ReachabilityFireability-12(UNSAT) depth K=0 took 1 ms
May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd runBMC
INFO: BMC solution for property ParamProductionCell-PT-5-ReachabilityFireability-13(UNSAT) depth K=0 took 0 ms
May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd runBMC
INFO: BMC solution for property ParamProductionCell-PT-5-ReachabilityFireability-14(UNSAT) depth K=0 took 4 ms
May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd runBMC
INFO: BMC solution for property ParamProductionCell-PT-5-ReachabilityFireability-15(UNSAT) depth K=0 took 4 ms
May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd runBMC
INFO: BMC solution for property ParamProductionCell-PT-5-ReachabilityFireability-00(UNSAT) depth K=1 took 12 ms
May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd runBMC
INFO: BMC solution for property ParamProductionCell-PT-5-ReachabilityFireability-01(UNSAT) depth K=1 took 12 ms
May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd runBMC
INFO: BMC solution for property ParamProductionCell-PT-5-ReachabilityFireability-02(UNSAT) depth K=1 took 12 ms
May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd runBMC
INFO: BMC solution for property ParamProductionCell-PT-5-ReachabilityFireability-03(UNSAT) depth K=1 took 12 ms
May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd runBMC
INFO: BMC solution for property ParamProductionCell-PT-5-ReachabilityFireability-04(UNSAT) depth K=1 took 12 ms
May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd runBMC
INFO: BMC solution for property ParamProductionCell-PT-5-ReachabilityFireability-05(UNSAT) depth K=1 took 16 ms
May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd runBMC
INFO: BMC solution for property ParamProductionCell-PT-5-ReachabilityFireability-06(UNSAT) depth K=1 took 2 ms
May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd runBMC
INFO: BMC solution for property ParamProductionCell-PT-5-ReachabilityFireability-07(UNSAT) depth K=1 took 6 ms
May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd runBMC
INFO: BMC solution for property ParamProductionCell-PT-5-ReachabilityFireability-08(UNSAT) depth K=1 took 15 ms
May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2smt.bmc.KInductionSolver computeAndDeclareInvariants
INFO: Computed 59 place invariants in 40 ms
May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd runBMC
INFO: BMC solution for property ParamProductionCell-PT-5-ReachabilityFireability-09(UNSAT) depth K=1 took 13 ms
May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd runBMC
INFO: BMC solution for property ParamProductionCell-PT-5-ReachabilityFireability-10(UNSAT) depth K=1 took 9 ms
May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd runBMC
INFO: BMC solution for property ParamProductionCell-PT-5-ReachabilityFireability-11(UNSAT) depth K=1 took 2 ms
May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd runBMC
INFO: BMC solution for property ParamProductionCell-PT-5-ReachabilityFireability-12(UNSAT) depth K=1 took 2 ms
May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd runBMC
INFO: BMC solution for property ParamProductionCell-PT-5-ReachabilityFireability-13(UNSAT) depth K=1 took 3 ms
May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd runBMC
INFO: BMC solution for property ParamProductionCell-PT-5-ReachabilityFireability-14(UNSAT) depth K=1 took 5 ms
May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd runBMC
INFO: BMC solution for property ParamProductionCell-PT-5-ReachabilityFireability-15(UNSAT) depth K=1 took 2 ms
May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd runBMC
INFO: BMC solution for property ParamProductionCell-PT-5-ReachabilityFireability-00(UNSAT) depth K=2 took 165 ms
May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd checkProperties
WARNING: Interrupting SMT solver.
May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2smt.bmc.NextBMCSolver checkSat
WARNING: SMT solver unexpectedly returned 'unknown' answer, retrying.
Exception in thread "Thread-8" May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2smt.bmc.NextBMCSolver checkSat
WARNING: SMT solver unexpectedly returned 'unknown' answer, retrying.
Skipping mayMatrices nes/nds SMT solver raised an exception or timeout :(error "Failed to check-sat")
java.lang.RuntimeException: SMT solver raised an error :unknown
at fr.lip6.move.gal.gal2smt.bmc.NextBMCSolver.checkSat(NextBMCSolver.java:318)
at fr.lip6.move.gal.gal2smt.bmc.NextBMCSolver.checkSat(NextBMCSolver.java:305)
at fr.lip6.move.gal.gal2smt.bmc.KInductionSolver.init(KInductionSolver.java:116)
at fr.lip6.move.gal.gal2smt.smt.ISMTSolver.init(ISMTSolver.java:17)
at fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd.runKInduction(Gal2SMTFrontEnd.java:278)
at fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd.access$1(Gal2SMTFrontEnd.java:274)
at fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd$2.run(Gal2SMTFrontEnd.java:166)
at java.lang.Thread.run(Thread.java:748)
java.lang.RuntimeException: SMT solver raised an exception or timeout :(error "Solver has unexpectedly terminated")
at fr.lip6.move.gal.gal2smt.bmc.NextBMCSolver.checkSat(NextBMCSolver.java:297)
at fr.lip6.move.gal.gal2smt.bmc.NextBMCSolver.verifyAssertion(NextBMCSolver.java:452)
at fr.lip6.move.gal.gal2smt.bmc.NextBMCSolver.verify(NextBMCSolver.java:435)
at fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd.runBMC(Gal2SMTFrontEnd.java:378)
at fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd.access$0(Gal2SMTFrontEnd.java:350)
at fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd$1.run(Gal2SMTFrontEnd.java:159)
at java.lang.Thread.run(Thread.java:748)
java.lang.RuntimeException: SMT solver raised an exception or timeout :(error "Failed to check-sat")
at fr.lip6.move.gal.gal2smt.bmc.NextBMCSolver.checkSat(NextBMCSolver.java:297)
at fr.lip6.move.gal.gal2smt.bmc.NextBMCSolver.checkSat(NextBMCSolver.java:305)
at fr.lip6.move.gal.gal2smt.bmc.KInductionSolver.init(KInductionSolver.java:116)
at fr.lip6.move.gal.gal2smt.bmc.NecessaryEnablingsolver.init(NecessaryEnablingsolver.java:71)
at fr.lip6.move.gal.gal2pins.Gal2PinsTransformerNext.printLabels(Gal2PinsTransformerNext.java:471)
at fr.lip6.move.gal.gal2pins.Gal2PinsTransformerNext.printDependencyMatrix(Gal2PinsTransformerNext.java:209)
at fr.lip6.move.gal.gal2pins.Gal2PinsTransformerNext.buildBodyFile(Gal2PinsTransformerNext.java:85)
at fr.lip6.move.gal.gal2pins.Gal2PinsTransformerNext.transform(Gal2PinsTransformerNext.java:830)
at fr.lip6.move.gal.application.LTSminRunner$1.run(LTSminRunner.java:71)
at java.lang.Thread.run(Thread.java:748)
May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd runBMC
WARNING: Unexpected error occurred while running SMT. Was verifying ParamProductionCell-PT-5-ReachabilityFireability-01 SMT depth 2
java.lang.RuntimeException: java.lang.RuntimeException: SMT solver raised an exception or timeout :(error "Solver has unexpectedly terminated")
at fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd.runBMC(Gal2SMTFrontEnd.java:404)
at fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd.access$0(Gal2SMTFrontEnd.java:350)
at fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd$1.run(Gal2SMTFrontEnd.java:159)
at java.lang.Thread.run(Thread.java:748)
Caused by: java.lang.RuntimeException: SMT solver raised an exception or timeout :(error "Solver has unexpectedly terminated")
at fr.lip6.move.gal.gal2smt.bmc.NextBMCSolver.checkSat(NextBMCSolver.java:297)
at fr.lip6.move.gal.gal2smt.bmc.NextBMCSolver.verifyAssertion(NextBMCSolver.java:452)
at fr.lip6.move.gal.gal2smt.bmc.NextBMCSolver.verify(NextBMCSolver.java:435)
at fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd.runBMC(Gal2SMTFrontEnd.java:378)
... 3 more
May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd runBMC
INFO: During BMC, SMT solver timed out at depth 2
May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd runBMC
INFO: BMC solving timed out (3600000 secs) at depth 2
May 24, 2018 3:47:45 PM fr.lip6.move.gal.application.SMTRunner$2 run
INFO: SMT solved 0/ 16 properties. Interrupting other analysis methods.
May 24, 2018 3:47:45 PM fr.lip6.move.gal.gal2pins.Gal2PinsTransformerNext transform
INFO: Built C files in 984ms conformant to PINS in folder :/home/mcc/execution
Sequence of Actions to be Executed by the VM
This is useful if one wants to reexecute the tool in the VM from the submitted image disk.
set -x
# this is for BenchKit: configuration of major elements for the test
export BK_INPUT="ParamProductionCell-PT-5"
export BK_EXAMINATION="ReachabilityFireability"
export BK_TOOL="itstools"
export BK_RESULT_DIR="/tmp/BK_RESULTS/OUTPUTS"
export BK_TIME_CONFINEMENT="3600"
export BK_MEMORY_CONFINEMENT="16384"
# this is specific to your benchmark or test
export BIN_DIR="$HOME/BenchKit/bin"
# remove the execution directoty if it exists (to avoid increse of .vmdk images)
if [ -d execution ] ; then
rm -rf execution
fi
tar xzf /home/mcc/BenchKit/INPUTS/ParamProductionCell-PT-5.tgz
mv ParamProductionCell-PT-5 execution
cd execution
pwd
ls -lh
# this is for BenchKit: explicit launching of the test
echo "====================================================================="
echo " Generated by BenchKit 2-3637"
echo " Executing tool itstools"
echo " Input is ParamProductionCell-PT-5, examination is ReachabilityFireability"
echo " Time confinement is $BK_TIME_CONFINEMENT seconds"
echo " Memory confinement is 16384 MBytes"
echo " Number of cores is 4"
echo " Run identifier is r116-csrt-152666475300385"
echo "====================================================================="
echo
echo "--------------------"
echo "content from stdout:"
echo
echo "=== Data for post analysis generated by BenchKit (invocation template)"
echo
if [ "ReachabilityFireability" = "UpperBounds" ] ; then
echo "The expected result is a vector of positive values"
echo NUM_VECTOR
elif [ "ReachabilityFireability" != "StateSpace" ] ; then
echo "The expected result is a vector of booleans"
echo BOOL_VECTOR
else
echo "no data necessary for post analysis"
fi
echo
if [ -f "ReachabilityFireability.txt" ] ; then
echo "here is the order used to build the result vector(from text file)"
for x in $(grep Property ReachabilityFireability.txt | cut -d ' ' -f 2 | sort -u) ; do
echo "FORMULA_NAME $x"
done
elif [ -f "ReachabilityFireability.xml" ] ; then # for cunf (txt files deleted;-)
echo echo "here is the order used to build the result vector(from xml file)"
for x in $(grep '
echo "FORMULA_NAME $x"
done
fi
echo
echo "=== Now, execution of the tool begins"
echo
echo -n "BK_START "
date -u +%s%3N
echo
timeout -s 9 $BK_TIME_CONFINEMENT bash -c "/home/mcc/BenchKit/BenchKit_head.sh 2> STDERR ; echo ; echo -n \"BK_STOP \" ; date -u +%s%3N"
if [ $? -eq 137 ] ; then
echo
echo "BK_TIME_CONFINEMENT_REACHED"
fi
echo
echo "--------------------"
echo "content from stderr:"
echo
cat STDERR ;