
About the Execution of ITS-Tools for RobotManipulation-PT-00005
| Execution Summary | |||||
| Max Memory Used (MB) |
Time wait (ms) | CPU Usage (ms) | I/O Wait (ms) | Computed Result | Execution Status |
| 264.540 | 3475.00 | 5645.00 | 198.00 | FTTFTFFTFFTTTTTF | normal |
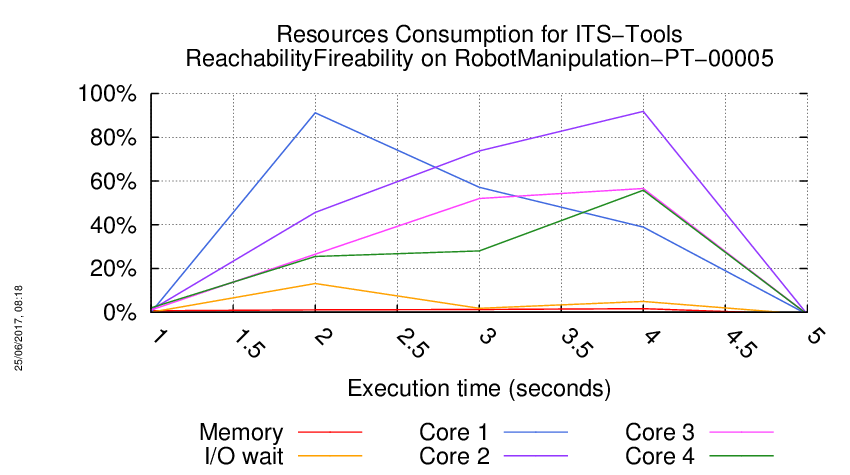
Execution Chart
We display below the execution chart for this examination (boot time has been removed).
Trace from the execution
Waiting for the VM to be ready (probing ssh)
..............
=====================================================================
Generated by BenchKit 2-3254
Executing tool itstools
Input is RobotManipulation-PT-00005, examination is ReachabilityFireability
Time confinement is 3600 seconds
Memory confinement is 16384 MBytes
Number of cores is 4
Run identifier is r210-smll-149581174400216
=====================================================================
--------------------
content from stdout:
=== Data for post analysis generated by BenchKit (invocation template)
The expected result is a vector of booleans
BOOL_VECTOR
here is the order used to build the result vector(from text file)
FORMULA_NAME RobotManipulation-PT-00005-ReachabilityFireability-0
FORMULA_NAME RobotManipulation-PT-00005-ReachabilityFireability-1
FORMULA_NAME RobotManipulation-PT-00005-ReachabilityFireability-10
FORMULA_NAME RobotManipulation-PT-00005-ReachabilityFireability-11
FORMULA_NAME RobotManipulation-PT-00005-ReachabilityFireability-12
FORMULA_NAME RobotManipulation-PT-00005-ReachabilityFireability-13
FORMULA_NAME RobotManipulation-PT-00005-ReachabilityFireability-14
FORMULA_NAME RobotManipulation-PT-00005-ReachabilityFireability-15
FORMULA_NAME RobotManipulation-PT-00005-ReachabilityFireability-2
FORMULA_NAME RobotManipulation-PT-00005-ReachabilityFireability-3
FORMULA_NAME RobotManipulation-PT-00005-ReachabilityFireability-4
FORMULA_NAME RobotManipulation-PT-00005-ReachabilityFireability-5
FORMULA_NAME RobotManipulation-PT-00005-ReachabilityFireability-6
FORMULA_NAME RobotManipulation-PT-00005-ReachabilityFireability-7
FORMULA_NAME RobotManipulation-PT-00005-ReachabilityFireability-8
FORMULA_NAME RobotManipulation-PT-00005-ReachabilityFireability-9
=== Now, execution of the tool begins
BK_START 1496298935818
FORMULA RobotManipulation-PT-00005-ReachabilityFireability-15 TRUE TECHNIQUES TOPOLOGICAL INITIAL_STATE
FORMULA RobotManipulation-PT-00005-ReachabilityFireability-13 FALSE TECHNIQUES TOPOLOGICAL INITIAL_STATE
Using solver YICES2 to compute partial order matrices.
Built C files in :
/home/mcc/execution
its-reach command run as :
/home/mcc/BenchKit/eclipse/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.201705302212/bin/its-reach-linux64 --gc-threshold 2000000 --quiet -i /home/mcc/execution/ReachabilityFireability.pnml.gal -t CGAL -reachable-file ReachabilityFireability.prop --nowitness
Loading property file ReachabilityFireability.prop.
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
RobotManipulation\_PT\_00005\_flat\_flat,184756,0.145399,8436,2,1048,5,19366,6,0,74,19826,0
Total reachable state count : 184756
Verifying 14 reachability properties.
Invariant property RobotManipulation-PT-00005-ReachabilityFireability-0 does not hold.
FORMULA RobotManipulation-PT-00005-ReachabilityFireability-0 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL COLLATERAL_PROCESSING
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
RobotManipulation-PT-00005-ReachabilityFireability-0,22880,0.148457,8668,2,543,6,19366,7,0,115,19826,0
Reachability property RobotManipulation-PT-00005-ReachabilityFireability-1 is true.
FORMULA RobotManipulation-PT-00005-ReachabilityFireability-1 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL COLLATERAL_PROCESSING
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
RobotManipulation-PT-00005-ReachabilityFireability-1,1,0.149436,8912,2,16,7,19366,8,0,130,19826,0
Reachability property RobotManipulation-PT-00005-ReachabilityFireability-2 does not hold.
FORMULA RobotManipulation-PT-00005-ReachabilityFireability-2 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL COLLATERAL_PROCESSING
No reachable states exhibit your property : RobotManipulation-PT-00005-ReachabilityFireability-2
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
RobotManipulation-PT-00005-ReachabilityFireability-2,0,0.150683,8912,1,0,7,19366,9,0,137,19826,0
Invariant property RobotManipulation-PT-00005-ReachabilityFireability-3 does not hold.
FORMULA RobotManipulation-PT-00005-ReachabilityFireability-3 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL COLLATERAL_PROCESSING
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
RobotManipulation-PT-00005-ReachabilityFireability-3,990,0.154396,8912,2,194,8,19366,10,0,223,19826,0
Reachability property RobotManipulation-PT-00005-ReachabilityFireability-4 is true.
FORMULA RobotManipulation-PT-00005-ReachabilityFireability-4 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL COLLATERAL_PROCESSING
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
RobotManipulation-PT-00005-ReachabilityFireability-4,1,0.155583,8912,2,16,9,19366,11,0,243,19826,0
Reachability property RobotManipulation-PT-00005-ReachabilityFireability-5 is true.
FORMULA RobotManipulation-PT-00005-ReachabilityFireability-5 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL COLLATERAL_PROCESSING
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
RobotManipulation-PT-00005-ReachabilityFireability-5,5082,0.161179,8912,2,511,10,19366,12,0,257,19826,0
Reachability property RobotManipulation-PT-00005-ReachabilityFireability-6 is true.
FORMULA RobotManipulation-PT-00005-ReachabilityFireability-6 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL COLLATERAL_PROCESSING
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
RobotManipulation-PT-00005-ReachabilityFireability-6,13013,0.169609,8912,2,696,11,19366,13,0,297,19826,0
Reachability property RobotManipulation-PT-00005-ReachabilityFireability-7 is true.
FORMULA RobotManipulation-PT-00005-ReachabilityFireability-7 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL COLLATERAL_PROCESSING
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
RobotManipulation-PT-00005-ReachabilityFireability-7,3003,0.172833,8912,2,564,12,19366,14,0,304,19826,0
Invariant property RobotManipulation-PT-00005-ReachabilityFireability-8 is true.
FORMULA RobotManipulation-PT-00005-ReachabilityFireability-8 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL COLLATERAL_PROCESSING
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
RobotManipulation-PT-00005-ReachabilityFireability-8,0,0.174548,8912,1,0,12,19366,15,0,313,19826,0
Reachability property RobotManipulation-PT-00005-ReachabilityFireability-9 does not hold.
FORMULA RobotManipulation-PT-00005-ReachabilityFireability-9 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL COLLATERAL_PROCESSING
No reachable states exhibit your property : RobotManipulation-PT-00005-ReachabilityFireability-9
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
RobotManipulation-PT-00005-ReachabilityFireability-9,0,0.175947,8912,1,0,12,19366,16,0,316,19826,0
Invariant property RobotManipulation-PT-00005-ReachabilityFireability-10 is true.
FORMULA RobotManipulation-PT-00005-ReachabilityFireability-10 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL COLLATERAL_PROCESSING
FORMULA RobotManipulation-PT-00005-ReachabilityFireability-8 TRUE TECHNIQUES SAT_SMT TAUTOLOGY
FORMULA RobotManipulation-PT-00005-ReachabilityFireability-9 FALSE TECHNIQUES SAT_SMT TAUTOLOGY
FORMULA RobotManipulation-PT-00005-ReachabilityFireability-10 TRUE TECHNIQUES SAT_SMT TAUTOLOGY
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
RobotManipulation-PT-00005-ReachabilityFireability-10,0,0.176893,8912,1,0,12,19366,17,0,319,19826,0
Reachability property RobotManipulation-PT-00005-ReachabilityFireability-11 does not hold.
FORMULA RobotManipulation-PT-00005-ReachabilityFireability-11 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL COLLATERAL_PROCESSING
No reachable states exhibit your property : RobotManipulation-PT-00005-ReachabilityFireability-11
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
RobotManipulation-PT-00005-ReachabilityFireability-11,0,0.181549,8912,1,0,12,19366,18,0,327,19826,0
Invariant property RobotManipulation-PT-00005-ReachabilityFireability-12 is true.
FORMULA RobotManipulation-PT-00005-ReachabilityFireability-12 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL COLLATERAL_PROCESSING
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
RobotManipulation-PT-00005-ReachabilityFireability-12,0,0.187537,8912,1,0,12,19366,19,0,332,19826,0
Invariant property RobotManipulation-PT-00005-ReachabilityFireability-14 does not hold.
FORMULA RobotManipulation-PT-00005-ReachabilityFireability-14 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL COLLATERAL_PROCESSING
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
RobotManipulation-PT-00005-ReachabilityFireability-14,1,0.187896,8912,2,16,13,19366,20,0,333,19826,0
Presburger conditions satisfied. Using coverability to approximate state space in K-Induction.
FORMULA RobotManipulation-PT-00005-ReachabilityFireability-11 FALSE TECHNIQUES SAT_SMT TAUTOLOGY
FORMULA RobotManipulation-PT-00005-ReachabilityFireability-12 TRUE TECHNIQUES SAT_SMT TAUTOLOGY
// Phase 1: matrix 11 rows 15 cols
invariant : 1'r_stopped + 1'r_active + 1'r_moving= 10
invariant : -1'initialize + 1'move + 1'moved + 1'off + -1'r_active + 1'p_rdy + 1'p_sc + 1'p_rel + 1'p_i2= 0
invariant : 1'initialize + -1'off + -1'r_stopped + 1'p_i1= 1
invariant : 1'move + 1'moved + -1'r_stopped + -1'r_active + 1'p_sc + 1'p_rel + 1'access= 0
invariant : -1'move + -1'moved + 1'r_stopped + 1'r_active + 1'p_m= 10
invariant : 1'move + 1'moved + 1'off + -1'r_active + 1'p_rdy + 1'p_sc + 1'p_rel + 1'initialized= 0
Exit code :0
Presburger conditions satisfied. Using coverability to approximate state space in K-Induction.
// Phase 1: matrix 11 rows 15 cols
invariant : 1'r_stopped + 1'r_active + 1'r_moving= 10
invariant : -1'initialize + 1'move + 1'moved + 1'off + -1'r_active + 1'p_rdy + 1'p_sc + 1'p_rel + 1'p_i2= 0
invariant : 1'initialize + -1'off + -1'r_stopped + 1'p_i1= 1
invariant : 1'move + 1'moved + -1'r_stopped + -1'r_active + 1'p_sc + 1'p_rel + 1'access= 0
invariant : -1'move + -1'moved + 1'r_stopped + 1'r_active + 1'p_m= 10
invariant : 1'move + 1'moved + 1'off + -1'r_active + 1'p_rdy + 1'p_sc + 1'p_rel + 1'initialized= 0
BK_STOP 1496298939293
--------------------
content from stderr:
+ export BINDIR=/home/mcc/BenchKit/
+ BINDIR=/home/mcc/BenchKit/
++ pwd
+ export MODEL=/home/mcc/execution
+ MODEL=/home/mcc/execution
+ [[ ReachabilityFireability = StateSpace ]]
+ /home/mcc/BenchKit//runeclipse.sh /home/mcc/execution ReachabilityFireability -its -ltsminpath /home/mcc/BenchKit//lts_install_dir/ -smt
+ ulimit -s 65536
+ java -Dosgi.requiredJavaVersion=1.6 -Xss8m -Xms40m -Xmx8192m -Declipse.pde.launch=true -Dfile.encoding=UTF-8 -classpath /home/mcc/BenchKit//eclipse/plugins/org.eclipse.equinox.launcher_1.3.201.v20161025-1711.jar org.eclipse.equinox.launcher.Main -application fr.lip6.move.gal.application.pnmcc -data /home/mcc/BenchKit//workspace -os linux -ws gtk -arch x86_64 -nl en_US -consoleLog -pnfolder /home/mcc/execution -examination ReachabilityFireability -yices2path /home/mcc/BenchKit//yices/bin/yices -its -ltsminpath /home/mcc/BenchKit//lts_install_dir/ -smt
Jun 01, 2017 6:35:37 AM fr.lip6.move.gal.application.MccTranslator transformPNML
INFO: Parsing pnml file : /home/mcc/execution/model.pnml
Jun 01, 2017 6:35:38 AM fr.lip6.move.gal.nupn.PTNetReader loadFromXML
INFO: Load time of PNML (sax parser for PT used): 31 ms
Jun 01, 2017 6:35:38 AM fr.lip6.move.gal.pnml.togal.PTGALTransformer handlePage
INFO: Transformed 15 places.
Jun 01, 2017 6:35:38 AM fr.lip6.move.gal.pnml.togal.PTGALTransformer handlePage
INFO: Transformed 11 transitions.
Jun 01, 2017 6:35:38 AM fr.lip6.move.gal.instantiate.PropertySimplifier rewriteWithInitialState
INFO: Invariant property RobotManipulation-PT-00005-ReachabilityFireability-13 is trivially false : it is not verified in initial state.
Jun 01, 2017 6:35:38 AM fr.lip6.move.gal.instantiate.PropertySimplifier rewriteWithInitialState
INFO: Reachable property RobotManipulation-PT-00005-ReachabilityFireability-15 is trivially true : it is verified in initial state.
Jun 01, 2017 6:35:38 AM fr.lip6.move.gal.instantiate.GALRewriter flatten
INFO: Flatten gal took : 30 ms
Jun 01, 2017 6:35:38 AM fr.lip6.move.gal.instantiate.GALRewriter flatten
INFO: Flatten gal took : 18 ms
Jun 01, 2017 6:35:38 AM fr.lip6.move.serialization.SerializationUtil systemToFile
INFO: Time to serialize gal into /home/mcc/execution/ReachabilityFireability.pnml.gal : 9 ms
Jun 01, 2017 6:35:38 AM fr.lip6.move.gal.instantiate.GALRewriter flatten
INFO: Flatten gal took : 6 ms
Jun 01, 2017 6:35:38 AM fr.lip6.move.serialization.SerializationUtil serializePropertiesForITSTools
INFO: Time to serialize properties into /home/mcc/execution/ReachabilityFireability.prop : 3 ms
Jun 01, 2017 6:35:38 AM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd checkProperties
INFO: Result for false tautology is UNSAT, invariant/never predicate is unrealizable RobotManipulation-PT-00005-ReachabilityFireability-8
Jun 01, 2017 6:35:38 AM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd checkProperties
INFO: Result for false tautology is UNSAT, reachability predicate is unrealizable RobotManipulation-PT-00005-ReachabilityFireability-9
Jun 01, 2017 6:35:38 AM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd checkProperties
INFO: Result for false tautology is UNSAT, invariant/never predicate is unrealizable RobotManipulation-PT-00005-ReachabilityFireability-10
Jun 01, 2017 6:35:38 AM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd checkProperties
INFO: Result for false tautology is UNSAT, reachability predicate is unrealizable RobotManipulation-PT-00005-ReachabilityFireability-11
Jun 01, 2017 6:35:38 AM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd checkProperties
INFO: Result for false tautology is UNSAT, invariant/never predicate is unrealizable RobotManipulation-PT-00005-ReachabilityFireability-12
Jun 01, 2017 6:35:38 AM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd checkProperties
INFO: Ran tautology test, simplified 5 / 7 in 368 ms.
Jun 01, 2017 6:35:38 AM fr.lip6.move.gal.gal2smt.bmc.KInductionSolver computeAndDeclareInvariants
INFO: Computed 6 place invariants in 17 ms
Jun 01, 2017 6:35:38 AM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd runBMC
INFO: BMC solution for property RobotManipulation-PT-00005-ReachabilityFireability-7(UNSAT) depth K=0 took 8 ms
Jun 01, 2017 6:35:38 AM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd runBMC
INFO: BMC solution for property RobotManipulation-PT-00005-ReachabilityFireability-14(UNSAT) depth K=0 took 1 ms
Jun 01, 2017 6:35:38 AM fr.lip6.move.gal.itstools.Runner runTool
INFO: Standard error output from running tool CommandLine [args=[/home/mcc/BenchKit/eclipse/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.201705302212/bin/its-reach-linux64, --gc-threshold, 2000000, --quiet, -i, /home/mcc/execution/ReachabilityFireability.pnml.gal, -t, CGAL, -reachable-file, ReachabilityFireability.prop, --nowitness], workingDir=/home/mcc/execution]
Read property : RobotManipulation-PT-00005-ReachabilityFireability-0 with value :((!(p_rel>=1))||(!(((p_rdy>=1)&&(access>=1))&&((r_moving>=1)&&(p_rdy>=1)))))
Read property : RobotManipulation-PT-00005-ReachabilityFireability-1 with value :((p_rdy>=1)&&((!(p_i1>=1))&&((((p_m>=1)&&(moved>=1))||(p_rel>=1))&&(!((p_m>=1)&&(moved>=1))))))
Read property : RobotManipulation-PT-00005-ReachabilityFireability-2 with value :(((p_m>=1)&&(moved>=1))&&(((p_rel>=1)&&(!(p_rdy>=1)))&&((r_moving>=1)&&((p_rdy>=1)&&(p_rel>=1)))))
Read property : RobotManipulation-PT-00005-ReachabilityFireability-3 with value :(!(((((p_i2>=1)&&(initialized>=1))&&((r_active>=1)&&(off>=1)))&&((p_m>=1)&&(moved>=1)))&&(((p_rel>=1)&&((r_stopped>=1)&&(initialize>=1)))&&((p_i1>=1)&&((move>=1)&&(r_active>=1))))))
Read property : RobotManipulation-PT-00005-ReachabilityFireability-4 with value :((!(((p_i1>=1)||((p_i2>=1)&&(initialized>=1)))&&((p_rel>=1)||((r_stopped>=1)&&(initialize>=1)))))&&(((r_stopped>=1)&&(initialize>=1))&&((p_rel>=1)&&(!((p_rdy>=1)&&(access>=1))))))
Read property : RobotManipulation-PT-00005-ReachabilityFireability-5 with value :(((((r_stopped>=1)&&(initialize>=1))&&(p_rel>=1))&&(((move>=1)&&(r_active>=1))&&(!((p_i2>=1)&&(initialized>=1)))))&&(((p_i1>=1)||(r_moving>=1))&&(((p_rdy>=1)&&(access>=1))&&(((move>=1)&&(r_active>=1))&&(p_rdy>=1)))))
Read property : RobotManipulation-PT-00005-ReachabilityFireability-6 with value :((((r_moving>=1)&&(((move>=1)&&(r_active>=1))&&((p_m>=1)&&(moved>=1))))&&(((r_stopped>=1)&&(initialize>=1))||(((r_active>=1)&&(off>=1))&&((move>=1)&&(r_active>=1)))))&&((((p_rdy>=1)||(p_sc>=1))&&(!((move>=1)&&(r_active>=1))))||((!((p_m>=1)&&(moved>=1)))||(p_i1>=1))))
Read property : RobotManipulation-PT-00005-ReachabilityFireability-7 with value :(((!((p_i1>=1)||(p_sc>=1)))&&((move>=1)&&(r_active>=1)))&&(p_rel>=1))
Read property : RobotManipulation-PT-00005-ReachabilityFireability-8 with value :((!(((p_m>=1)&&(moved>=1))&&(((r_active>=1)&&(off>=1))&&(r_moving>=1))))||((!(((p_rdy>=1)&&(access>=1))&&((move>=1)&&(r_active>=1))))||(((p_rel>=1)||(p_rdy>=1))&&(p_rdy>=1))))
Read property : RobotManipulation-PT-00005-ReachabilityFireability-9 with value :(((p_rdy>=1)&&(access>=1))&&(((r_active>=1)&&(off>=1))&&(!(p_rdy>=1))))
Read property : RobotManipulation-PT-00005-ReachabilityFireability-10 with value :(((p_rel>=1)||(!(r_moving>=1)))||(r_moving>=1))
Read property : RobotManipulation-PT-00005-ReachabilityFireability-11 with value :(((((r_active>=1)&&(off>=1))&&(((p_m>=1)&&(moved>=1))&&((p_i2>=1)&&(initialized>=1))))&&(((p_sc>=1)&&((p_i2>=1)&&(initialized>=1)))&&((move>=1)&&(r_active>=1))))&&((p_rdy>=1)&&(((p_rdy>=1)&&((p_i2>=1)&&(initialized>=1)))&&(!((p_m>=1)&&(moved>=1))))))
Read property : RobotManipulation-PT-00005-ReachabilityFireability-12 with value :((((r_stopped>=1)&&(initialize>=1))||(((p_rel>=1)||(p_rdy>=1))||(p_sc>=1)))||(!((r_stopped>=1)&&(initialize>=1))))
Read property : RobotManipulation-PT-00005-ReachabilityFireability-14 with value :((p_i1>=1)||(p_rel>=1))
Jun 01, 2017 6:35:38 AM fr.lip6.move.gal.gal2smt.Gal2SMTFrontEnd checkProperties
WARNING: Interrupting SMT solver.
Sequence of Actions to be Executed by the VM
This is useful if one wants to reexecute the tool in the VM from the submitted image disk.
set -x
# this is for BenchKit: configuration of major elements for the test
export BK_INPUT="RobotManipulation-PT-00005"
export BK_EXAMINATION="ReachabilityFireability"
export BK_TOOL="itstools"
export BK_RESULT_DIR="/tmp/BK_RESULTS/OUTPUTS"
export BK_TIME_CONFINEMENT="3600"
export BK_MEMORY_CONFINEMENT="16384"
# this is specific to your benchmark or test
export BIN_DIR="$HOME/BenchKit/bin"
# remove the execution directoty if it exists (to avoid increse of .vmdk images)
if [ -d execution ] ; then
rm -rf execution
fi
tar xzf /home/mcc/BenchKit/INPUTS/RobotManipulation-PT-00005.tgz
mv RobotManipulation-PT-00005 execution
# this is for BenchKit: explicit launching of the test
cd execution
echo "====================================================================="
echo " Generated by BenchKit 2-3254"
echo " Executing tool itstools"
echo " Input is RobotManipulation-PT-00005, examination is ReachabilityFireability"
echo " Time confinement is $BK_TIME_CONFINEMENT seconds"
echo " Memory confinement is 16384 MBytes"
echo " Number of cores is 4"
echo " Run identifier is r210-smll-149581174400216"
echo "====================================================================="
echo
echo "--------------------"
echo "content from stdout:"
echo
echo "=== Data for post analysis generated by BenchKit (invocation template)"
echo
if [ "ReachabilityFireability" = "UpperBounds" ] ; then
echo "The expected result is a vector of positive values"
echo NUM_VECTOR
elif [ "ReachabilityFireability" != "StateSpace" ] ; then
echo "The expected result is a vector of booleans"
echo BOOL_VECTOR
else
echo "no data necessary for post analysis"
fi
echo
if [ -f "ReachabilityFireability.txt" ] ; then
echo "here is the order used to build the result vector(from text file)"
for x in $(grep Property ReachabilityFireability.txt | cut -d ' ' -f 2 | sort -u) ; do
echo "FORMULA_NAME $x"
done
elif [ -f "ReachabilityFireability.xml" ] ; then # for cunf (txt files deleted;-)
echo echo "here is the order used to build the result vector(from xml file)"
for x in $(grep '
echo "FORMULA_NAME $x"
done
fi
echo
echo "=== Now, execution of the tool begins"
echo
echo -n "BK_START "
date -u +%s%3N
echo
timeout -s 9 $BK_TIME_CONFINEMENT bash -c "/home/mcc/BenchKit/BenchKit_head.sh 2> STDERR ; echo ; echo -n \"BK_STOP \" ; date -u +%s%3N"
if [ $? -eq 137 ] ; then
echo
echo "BK_TIME_CONFINEMENT_REACHED"
fi
echo
echo "--------------------"
echo "content from stderr:"
echo
cat STDERR ;