
About the Execution of MARCIE for RobotManipulation-PT-00001
| Execution Summary | |||||
| Max Memory Used (MB) |
Time wait (ms) | CPU Usage (ms) | I/O Wait (ms) | Computed Result | Execution Status |
| 7483.050 | 7018.00 | 7030.00 | 20.00 | TTTTFTTFTTTTTTFF | normal |
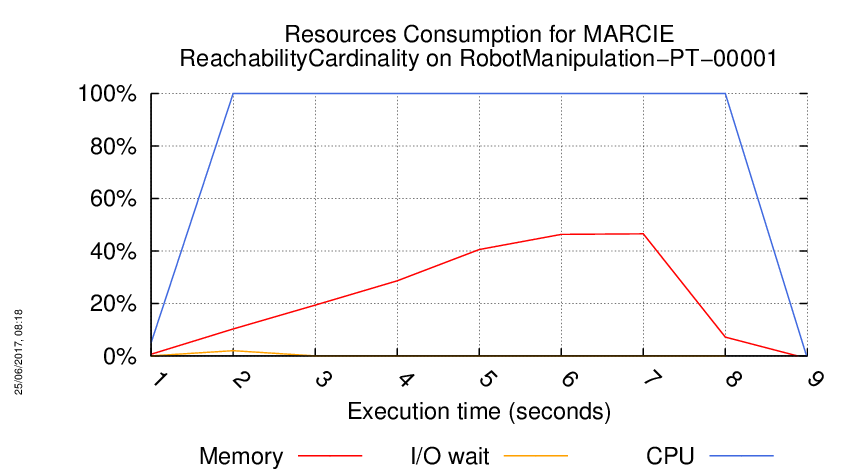
Execution Chart
We display below the execution chart for this examination (boot time has been removed).
Trace from the execution
Waiting for the VM to be ready (probing ssh)
..............
=====================================================================
Generated by BenchKit 2-3254
Executing tool marcie
Input is RobotManipulation-PT-00001, examination is ReachabilityCardinality
Time confinement is 3600 seconds
Memory confinement is 16384 MBytes
Number of cores is 1
Run identifier is r201-smll-149581161700196
=====================================================================
--------------------
content from stdout:
=== Data for post analysis generated by BenchKit (invocation template)
The expected result is a vector of booleans
BOOL_VECTOR
here is the order used to build the result vector(from text file)
FORMULA_NAME RobotManipulation-PT-00001-ReachabilityCardinality-0
FORMULA_NAME RobotManipulation-PT-00001-ReachabilityCardinality-1
FORMULA_NAME RobotManipulation-PT-00001-ReachabilityCardinality-10
FORMULA_NAME RobotManipulation-PT-00001-ReachabilityCardinality-11
FORMULA_NAME RobotManipulation-PT-00001-ReachabilityCardinality-12
FORMULA_NAME RobotManipulation-PT-00001-ReachabilityCardinality-13
FORMULA_NAME RobotManipulation-PT-00001-ReachabilityCardinality-14
FORMULA_NAME RobotManipulation-PT-00001-ReachabilityCardinality-15
FORMULA_NAME RobotManipulation-PT-00001-ReachabilityCardinality-2
FORMULA_NAME RobotManipulation-PT-00001-ReachabilityCardinality-3
FORMULA_NAME RobotManipulation-PT-00001-ReachabilityCardinality-4
FORMULA_NAME RobotManipulation-PT-00001-ReachabilityCardinality-5
FORMULA_NAME RobotManipulation-PT-00001-ReachabilityCardinality-6
FORMULA_NAME RobotManipulation-PT-00001-ReachabilityCardinality-7
FORMULA_NAME RobotManipulation-PT-00001-ReachabilityCardinality-8
FORMULA_NAME RobotManipulation-PT-00001-ReachabilityCardinality-9
=== Now, execution of the tool begins
BK_START 1495923664469
timeout --kill-after=10s --signal=SIGINT 1m for testing only
Marcie rev. 8852M (built: crohr on 2017-05-03)
A model checker for Generalized Stochastic Petri nets
authors: Alex Tovchigrechko (IDD package and CTL model checking)
Martin Schwarick (Symbolic numerical analysis and CSL model checking)
Christian Rohr (Simulative and approximative numerical model checking)
marcie@informatik.tu-cottbus.de
called as: marcie --net-file=model.pnml --mcc-file=ReachabilityCardinality.xml --memory=6
parse successfull
net created successfully
Net: RobotManipulation_PT_00001
(NrP: 15 NrTr: 11 NrArc: 34)
parse formulas
formulas created successfully
place and transition orderings generation:0m 0.000sec
net check time: 0m 0.000sec
init dd package: 0m 1.293sec
parse successfull
net created successfully
Net: RobotManipulation_PT_00001
(NrP: 15 NrTr: 11 NrArc: 34)
parse formulas
formulas created successfully
place and transition orderings generation:0m 0.000sec
net check time: 0m 0.000sec
init dd package: 0m 3.648sec
RS generation: 0m 0.000sec
-> reachability set: #nodes 107 (1.1e+02) #states 110
starting MCC model checker
--------------------------
checking: EF [2<=move]
normalized: E [true U 2<=move]
abstracting: (2<=move)
states: 2
-> the formula is TRUE
FORMULA RobotManipulation-PT-00001-ReachabilityCardinality-1 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.001sec
checking: AG [~ [p_sc<=p_i2]]
normalized: ~ [E [true U p_sc<=p_i2]]
abstracting: (p_sc<=p_i2)
states: 101
-> the formula is FALSE
FORMULA RobotManipulation-PT-00001-ReachabilityCardinality-8 FALSE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.000sec
checking: AG [move<=p_i2]
normalized: ~ [E [true U ~ [move<=p_i2]]]
abstracting: (move<=p_i2)
states: 101
-> the formula is FALSE
FORMULA RobotManipulation-PT-00001-ReachabilityCardinality-9 FALSE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.000sec
checking: EF [initialized<=off]
normalized: E [true U initialized<=off]
abstracting: (initialized<=off)
states: 93
-> the formula is TRUE
FORMULA RobotManipulation-PT-00001-ReachabilityCardinality-13 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.000sec
checking: AG [r_moving<=p_sc]
normalized: ~ [E [true U ~ [r_moving<=p_sc]]]
abstracting: (r_moving<=p_sc)
states: 92
-> the formula is FALSE
FORMULA RobotManipulation-PT-00001-ReachabilityCardinality-15 FALSE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.000sec
checking: EF [[~ [1<=p_m] | ~ [~ [p_rel<=p_rel]]]]
normalized: E [true U [~ [1<=p_m] | p_rel<=p_rel]]
abstracting: (p_rel<=p_rel)
states: 110
abstracting: (1<=p_m)
states: 54
-> the formula is TRUE
FORMULA RobotManipulation-PT-00001-ReachabilityCardinality-0 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.000sec
checking: EF [[off<=p_rdy & move<=p_rel]]
normalized: E [true U [off<=p_rdy & move<=p_rel]]
abstracting: (move<=p_rel)
states: 92
abstracting: (off<=p_rdy)
states: 84
-> the formula is TRUE
FORMULA RobotManipulation-PT-00001-ReachabilityCardinality-11 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.000sec
checking: EF [~ [[[p_sc<=r_active & 3<=moved] & p_rdy<=r_moving]]]
normalized: E [true U ~ [[[p_sc<=r_active & 3<=moved] & p_rdy<=r_moving]]]
abstracting: (p_rdy<=r_moving)
states: 92
abstracting: (3<=moved)
states: 0
abstracting: (p_sc<=r_active)
states: 110
-> the formula is TRUE
FORMULA RobotManipulation-PT-00001-ReachabilityCardinality-3 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.000sec
checking: AG [[~ [~ [r_active<=r_active]] | [~ [r_stopped<=p_i2] & 2<=r_moving]]]
normalized: ~ [E [true U ~ [[[~ [r_stopped<=p_i2] & 2<=r_moving] | r_active<=r_active]]]]
abstracting: (r_active<=r_active)
states: 110
abstracting: (2<=r_moving)
states: 2
abstracting: (r_stopped<=p_i2)
states: 101
-> the formula is TRUE
FORMULA RobotManipulation-PT-00001-ReachabilityCardinality-10 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.000sec
checking: EF [[~ [3<=move] & [2<=initialized | [p_sc<=p_i1 | access<=p_rdy]]]]
normalized: E [true U [[[p_sc<=p_i1 | access<=p_rdy] | 2<=initialized] & ~ [3<=move]]]
abstracting: (3<=move)
states: 0
abstracting: (2<=initialized)
states: 2
abstracting: (access<=p_rdy)
states: 42
abstracting: (p_sc<=p_i1)
states: 100
-> the formula is TRUE
FORMULA RobotManipulation-PT-00001-ReachabilityCardinality-4 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.000sec
checking: EF [[[[initialized<=r_moving | 1<=r_moving] | 1<=moved] & p_rdy<=access]]
normalized: E [true U [[[initialized<=r_moving | 1<=r_moving] | 1<=moved] & p_rdy<=access]]
abstracting: (p_rdy<=access)
states: 110
abstracting: (1<=moved)
states: 20
abstracting: (1<=r_moving)
states: 20
abstracting: (initialized<=r_moving)
states: 92
-> the formula is TRUE
FORMULA RobotManipulation-PT-00001-ReachabilityCardinality-5 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.000sec
checking: AG [[[move<=r_moving | [1<=moved | 1<=initialize]] & moved<=p_m]]
normalized: ~ [E [true U ~ [[[[1<=moved | 1<=initialize] | move<=r_moving] & moved<=p_m]]]]
abstracting: (moved<=p_m)
states: 110
abstracting: (move<=r_moving)
states: 92
abstracting: (1<=initialize)
states: 65
abstracting: (1<=moved)
states: 20
-> the formula is FALSE
FORMULA RobotManipulation-PT-00001-ReachabilityCardinality-12 FALSE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.000sec
checking: EF [[[[initialized<=moved & initialized<=r_moving] & ~ [r_moving<=initialize]] | access<=off]]
normalized: E [true U [[~ [r_moving<=initialize] & [initialized<=moved & initialized<=r_moving]] | access<=off]]
abstracting: (access<=off)
states: 49
abstracting: (initialized<=r_moving)
states: 92
abstracting: (initialized<=moved)
states: 92
abstracting: (r_moving<=initialize)
states: 100
-> the formula is TRUE
FORMULA RobotManipulation-PT-00001-ReachabilityCardinality-7 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.001sec
checking: EF [[p_rel<=r_active & [[3<=initialize | moved<=initialized] | [1<=r_moving | p_m<=r_stopped]]]]
normalized: E [true U [[[1<=r_moving | p_m<=r_stopped] | [3<=initialize | moved<=initialized]] & p_rel<=r_active]]
abstracting: (p_rel<=r_active)
states: 110
abstracting: (moved<=initialized)
states: 92
abstracting: (3<=initialize)
states: 3
abstracting: (p_m<=r_stopped)
states: 65
abstracting: (1<=r_moving)
states: 20
-> the formula is TRUE
FORMULA RobotManipulation-PT-00001-ReachabilityCardinality-14 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.000sec
checking: EF [[[[1<=p_i2 | 3<=r_moving] | [1<=p_rel & initialize<=p_m]] & [~ [p_m<=moved] & initialize<=p_rel]]]
normalized: E [true U [[~ [p_m<=moved] & initialize<=p_rel] & [[1<=p_rel & initialize<=p_m] | [1<=p_i2 | 3<=r_moving]]]]
abstracting: (3<=r_moving)
states: 0
abstracting: (1<=p_i2)
states: 74
abstracting: (initialize<=p_m)
states: 69
abstracting: (1<=p_rel)
states: 20
abstracting: (initialize<=p_rel)
states: 54
abstracting: (p_m<=moved)
states: 72
-> the formula is TRUE
FORMULA RobotManipulation-PT-00001-ReachabilityCardinality-2 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.000sec
checking: AG [[[[1<=p_rdy & p_rel<=off] | [3<=initialized & 2<=p_m]] | [[r_stopped<=moved & 3<=p_i2] | [r_active<=r_active | off<=p_i1]]]]
normalized: ~ [E [true U ~ [[[[r_active<=r_active | off<=p_i1] | [r_stopped<=moved & 3<=p_i2]] | [[3<=initialized & 2<=p_m] | [1<=p_rdy & p_rel<=off]]]]]]
abstracting: (p_rel<=off)
states: 93
abstracting: (1<=p_rdy)
states: 20
abstracting: (2<=p_m)
states: 12
abstracting: (3<=initialized)
states: 0
abstracting: (3<=p_i2)
states: 6
abstracting: (r_stopped<=moved)
states: 84
abstracting: (off<=p_i1)
states: 100
abstracting: (r_active<=r_active)
states: 110
-> the formula is TRUE
FORMULA RobotManipulation-PT-00001-ReachabilityCardinality-6 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.000sec
totally nodes used: 2110 (2.1e+03)
number of garbage collections: 0
fire ops cache: hits/miss/sum: 3680 6323 10003
used/not used/entry size/cache size: 7362 67101502 16 1024MB
basic ops cache: hits/miss/sum: 2216 5503 7719
used/not used/entry size/cache size: 9037 16768179 12 192MB
unary ops cache: hits/miss/sum: 0 0 0
used/not used/entry size/cache size: 0 16777216 8 128MB
abstract ops cache: hits/miss/sum: 0 0 0
used/not used/entry size/cache size: 0 16777216 12 192MB
state nr cache: hits/miss/sum: 478 843 1321
used/not used/entry size/cache size: 843 8387765 32 256MB
max state cache: hits/miss/sum: 0 0 0
used/not used/entry size/cache size: 0 8388608 32 256MB
uniqueHash elements/entry size/size: 67108864 4 256MB
0 67106918
1 1869
2 33
3 21
4 14
5 4
6 3
7 0
8 1
9 0
>= 10 1
Total processing time: 0m 6.908sec
BK_STOP 1495923671487
--------------------
content from stderr:
check for maximal unmarked siphon
ok
check for constant places
ok
check if there are places and transitions
ok
check if there are transitions without pre-places
ok
check if at least one transition is enabled in m0
ok
check if there are transitions that can never fire
ok
ptnet_zbdd.cc:255: Boundedness exception: net is not 1-bounded!
check for maximal unmarked siphon
ok
check for constant places
ok
check if there are places and transitions
ok
check if there are transitions without pre-places
ok
check if at least one transition is enabled in m0
ok
check if there are transitions that can never fire
ok
initing FirstDep: 0m 0.000sec
iterations count:97 (8), effective:21 (1)
initing FirstDep: 0m 0.000sec
iterations count:95 (8), effective:18 (1)
iterations count:23 (2), effective:2 (0)
iterations count:108 (9), effective:22 (2)
iterations count:19 (1), effective:2 (0)
iterations count:62 (5), effective:10 (0)
iterations count:11 (1), effective:0 (0)
iterations count:19 (1), effective:4 (0)
iterations count:11 (1), effective:0 (0)
iterations count:22 (2), effective:3 (0)
iterations count:20 (1), effective:3 (0)
iterations count:102 (9), effective:20 (1)
iterations count:40 (3), effective:9 (0)
iterations count:43 (3), effective:6 (0)
iterations count:98 (8), effective:19 (1)
Sequence of Actions to be Executed by the VM
This is useful if one wants to reexecute the tool in the VM from the submitted image disk.
set -x
# this is for BenchKit: configuration of major elements for the test
export BK_INPUT="RobotManipulation-PT-00001"
export BK_EXAMINATION="ReachabilityCardinality"
export BK_TOOL="marcie"
export BK_RESULT_DIR="/tmp/BK_RESULTS/OUTPUTS"
export BK_TIME_CONFINEMENT="3600"
export BK_MEMORY_CONFINEMENT="16384"
# this is specific to your benchmark or test
export BIN_DIR="$HOME/BenchKit/bin"
# remove the execution directoty if it exists (to avoid increse of .vmdk images)
if [ -d execution ] ; then
rm -rf execution
fi
tar xzf /home/mcc/BenchKit/INPUTS/RobotManipulation-PT-00001.tgz
mv RobotManipulation-PT-00001 execution
# this is for BenchKit: explicit launching of the test
cd execution
echo "====================================================================="
echo " Generated by BenchKit 2-3254"
echo " Executing tool marcie"
echo " Input is RobotManipulation-PT-00001, examination is ReachabilityCardinality"
echo " Time confinement is $BK_TIME_CONFINEMENT seconds"
echo " Memory confinement is 16384 MBytes"
echo " Number of cores is 1"
echo " Run identifier is r201-smll-149581161700196"
echo "====================================================================="
echo
echo "--------------------"
echo "content from stdout:"
echo
echo "=== Data for post analysis generated by BenchKit (invocation template)"
echo
if [ "ReachabilityCardinality" = "UpperBounds" ] ; then
echo "The expected result is a vector of positive values"
echo NUM_VECTOR
elif [ "ReachabilityCardinality" != "StateSpace" ] ; then
echo "The expected result is a vector of booleans"
echo BOOL_VECTOR
else
echo "no data necessary for post analysis"
fi
echo
if [ -f "ReachabilityCardinality.txt" ] ; then
echo "here is the order used to build the result vector(from text file)"
for x in $(grep Property ReachabilityCardinality.txt | cut -d ' ' -f 2 | sort -u) ; do
echo "FORMULA_NAME $x"
done
elif [ -f "ReachabilityCardinality.xml" ] ; then # for cunf (txt files deleted;-)
echo echo "here is the order used to build the result vector(from xml file)"
for x in $(grep '
echo "FORMULA_NAME $x"
done
fi
echo
echo "=== Now, execution of the tool begins"
echo
echo -n "BK_START "
date -u +%s%3N
echo
timeout -s 9 $BK_TIME_CONFINEMENT bash -c "/home/mcc/BenchKit/BenchKit_head.sh 2> STDERR ; echo ; echo -n \"BK_STOP \" ; date -u +%s%3N"
if [ $? -eq 137 ] ; then
echo
echo "BK_TIME_CONFINEMENT_REACHED"
fi
echo
echo "--------------------"
echo "content from stderr:"
echo
cat STDERR ;