
About the Execution of ITS-Tools for ParamProductionCell-PT-5
| Execution Summary | |||||
| Max Memory Used (MB) |
Time wait (ms) | CPU Usage (ms) | I/O Wait (ms) | Computed Result | Execution Status |
| 2967.770 | 317396.00 | 320944.00 | 96.80 | FTFTTFFFTTTFTFFF | normal |
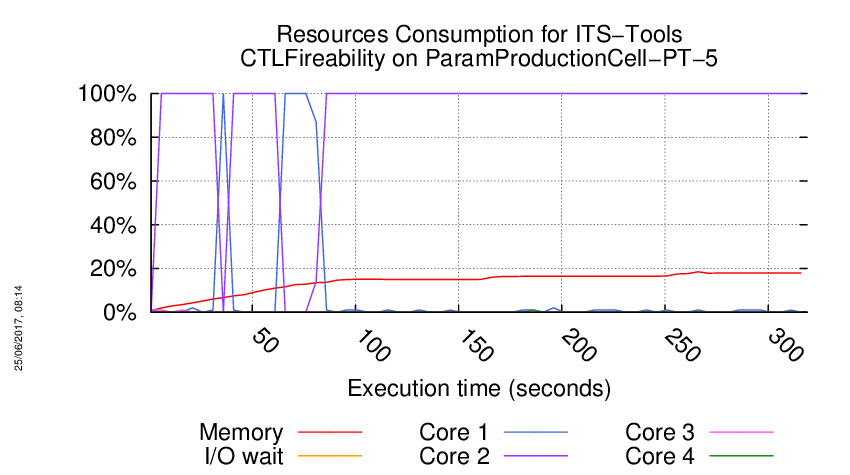
Execution Chart
We display below the execution chart for this examination (boot time has been removed).
Trace from the execution
Waiting for the VM to be ready (probing ssh)
......
=====================================================================
Generated by BenchKit 2-3254
Executing tool itstools
Input is ParamProductionCell-PT-5, examination is CTLFireability
Time confinement is 3600 seconds
Memory confinement is 16384 MBytes
Number of cores is 4
Run identifier is r040-blw7-149440486500319
=====================================================================
--------------------
content from stdout:
=== Data for post analysis generated by BenchKit (invocation template)
The expected result is a vector of booleans
BOOL_VECTOR
here is the order used to build the result vector(from text file)
FORMULA_NAME ParamProductionCell-PT-5-CTLFireability-0
FORMULA_NAME ParamProductionCell-PT-5-CTLFireability-1
FORMULA_NAME ParamProductionCell-PT-5-CTLFireability-10
FORMULA_NAME ParamProductionCell-PT-5-CTLFireability-11
FORMULA_NAME ParamProductionCell-PT-5-CTLFireability-12
FORMULA_NAME ParamProductionCell-PT-5-CTLFireability-13
FORMULA_NAME ParamProductionCell-PT-5-CTLFireability-14
FORMULA_NAME ParamProductionCell-PT-5-CTLFireability-15
FORMULA_NAME ParamProductionCell-PT-5-CTLFireability-2
FORMULA_NAME ParamProductionCell-PT-5-CTLFireability-3
FORMULA_NAME ParamProductionCell-PT-5-CTLFireability-4
FORMULA_NAME ParamProductionCell-PT-5-CTLFireability-5
FORMULA_NAME ParamProductionCell-PT-5-CTLFireability-6
FORMULA_NAME ParamProductionCell-PT-5-CTLFireability-7
FORMULA_NAME ParamProductionCell-PT-5-CTLFireability-8
FORMULA_NAME ParamProductionCell-PT-5-CTLFireability-9
=== Now, execution of the tool begins
BK_START 1496301719611
its-ctl command run as :
/home/mcc/BenchKit/eclipse/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.201705302212/bin/its-ctl-linux64 --gc-threshold 2000000 --quiet -i /home/mcc/execution/CTLFireability.pnml.gal -t CGAL -ctl /home/mcc/execution/CTLFireability.ctl
No direction supplied, using forward translation only.
Parsed 16 CTL formulae.
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
reachable,1.65724e+06,0.825486,29424,2,14159,5,102379,6,0,1129,79884,0
Converting to forward existential form...Done !
original formula: (AF(AG(((arm1_stop>=1 * A1U_rotated>=1) * (A1U_rot2_in>=1 * robot_stop>=1)))) + (EX(EX((arm2_pick_up_angle>=1 * A2U_in>=1))) * (!(((((A2L_ext_run>=1 * arm2_retract_ext>=1) * arm2_forward>=1) + ((A1L_rot2_run>=1 * arm2_pick_up_angle>=1) * robot_left>=1)) + !((TL_lower_rs>=1 * table_upward>=1)))) * arm2_having_swivel_1>=1)))
=> equivalent forward existential formula: [FwdG((Init * !((EX(EX((arm2_pick_up_angle>=1 * A2U_in>=1))) * (!(((((A2L_ext_run>=1 * arm2_retract_ext>=1) * arm2_forward>=1) + ((A1L_rot2_run>=1 * arm2_pick_up_angle>=1) * robot_left>=1)) + !((TL_lower_rs>=1 * table_upward>=1)))) * arm2_having_swivel_1>=1)))),!(!(E(TRUE U !(((arm1_stop>=1 * A1U_rotated>=1) * (A1U_rot2_in>=1 * robot_stop>=1)))))))] = FALSE
(forward)formula 0,0,15.0358,381204,1,0,357,1.67078e+06,467,212,7609,1.06494e+06,431
FORMULA ParamProductionCell-PT-5-CTLFireability-0 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is FALSE !
***************************************
original formula: (EG((!(((A2L_ret_run>=1 * arm2_retract_ext>=1) + (A2U_ret_run>=1 * arm2_retract_ext>=1))) * (!(A2U_out>=1) * ((PU_lower_run>=1 * press_at_lower_pos>=1) + ((A1L_ret_run>=1 * arm1_pick_up_ext>=1) * arm1_backward>=1))))) + E(AF(FB_out>=1) U AX((arm1_pick_up_angle>=1 * A2U_in>=1))))
=> equivalent forward existential formula: ([FwdG(Init,(!(((A2L_ret_run>=1 * arm2_retract_ext>=1) + (A2U_ret_run>=1 * arm2_retract_ext>=1))) * (!(A2U_out>=1) * ((PU_lower_run>=1 * press_at_lower_pos>=1) + ((A1L_ret_run>=1 * arm1_pick_up_ext>=1) * arm1_backward>=1)))))] != FALSE + [(FwdU(Init,!(EG(!(FB_out>=1)))) * !(EX(!((arm1_pick_up_angle>=1 * A2U_in>=1)))))] != FALSE)
(forward)formula 1,1,77.6303,1974968,1,0,1975,1.33604e+07,508,863,7637,8.47044e+06,2383
FORMULA ParamProductionCell-PT-5-CTLFireability-1 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: AF((AF(((A2L_ret_rs>=1 * arm2_backward>=1) * (TU_rot_run>=1 * table_unload_angle>=1))) + EF((((A1U_ext_run>=1 * arm1_retract_ext>=1) * arm1_forward>=1) * ((FB_deliver_run>=1 * belt1_start>=1) * belt1_light_barrier_true>=1)))))
=> equivalent forward existential formula: [FwdG(Init,!((!(EG(!(((A2L_ret_rs>=1 * arm2_backward>=1) * (TU_rot_run>=1 * table_unload_angle>=1))))) + E(TRUE U (((A1U_ext_run>=1 * arm1_retract_ext>=1) * arm1_forward>=1) * ((FB_deliver_run>=1 * belt1_start>=1) * belt1_light_barrier_true>=1))))))] = FALSE
(forward)formula 2,1,115.422,2211040,1,0,2064,1.50289e+07,19,908,3925,9.38294e+06,167
FORMULA ParamProductionCell-PT-5-CTLFireability-2 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: E((EG((A1U_ret_run>=1 * arm1_retract_ext>=1)) + AF(((A1U_ext_run>=1 * arm1_retract_ext>=1) * arm1_forward>=1))) U ((A2L_loaded>=1 * arm2_stop>=1) + ((feed_belt_occupied>=1 * ch_FT_free>=1) * (A1L_out>=1 + (crane_stop_h>=1 * CL_ready_to_transport>=1)))))
=> equivalent forward existential formula: [(FwdU(Init,(EG((A1U_ret_run>=1 * arm1_retract_ext>=1)) + !(EG(!(((A1U_ext_run>=1 * arm1_retract_ext>=1) * arm1_forward>=1)))))) * ((A2L_loaded>=1 * arm2_stop>=1) + ((feed_belt_occupied>=1 * ch_FT_free>=1) * (A1L_out>=1 + (crane_stop_h>=1 * CL_ready_to_transport>=1)))))] != FALSE
(forward)formula 3,1,159.64,2283700,1,0,2121,1.65832e+07,59,908,4525,1.07404e+07,2605
FORMULA ParamProductionCell-PT-5-CTLFireability-3 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: AF(((DB_trans_run>=1 * belt2_light_barrier_true>=1) + ((A2U_rot3_run>=1 * arm2_pick_up_angle>=1) * robot_right>=1)))
=> equivalent forward existential formula: [FwdG(Init,!(((DB_trans_run>=1 * belt2_light_barrier_true>=1) + ((A2U_rot3_run>=1 * arm2_pick_up_angle>=1) * robot_right>=1))))] = FALSE
Hit Full ! (commute/partial/dont) 175/24/27
(forward)formula 4,1,189.989,2454240,1,0,2123,1.73677e+07,9,908,3308,1.14466e+07,1
FORMULA ParamProductionCell-PT-5-CTLFireability-4 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: (((arm2_storing>=1 * ch_A2D_free>=1) * AX(!(((CU_lower_rs>=1 * crane_lower>=1) * (A2U_unloaded>=1 * arm2_stop>=1))))) + AF(((A1U_rot3_in>=1 * robot_stop>=1) + (((A2U_unloaded>=1 * arm2_stop>=1) * (TU_rot_run>=1 * table_unload_angle>=1)) * (A1U_out>=1 + (arm1_pick_up_angle>=1 * A2U_in>=1))))))
=> equivalent forward existential formula: [FwdG((Init * !(((arm2_storing>=1 * ch_A2D_free>=1) * !(EX(!(!(((CU_lower_rs>=1 * crane_lower>=1) * (A2U_unloaded>=1 * arm2_stop>=1))))))))),!(((A1U_rot3_in>=1 * robot_stop>=1) + (((A2U_unloaded>=1 * arm2_stop>=1) * (TU_rot_run>=1 * table_unload_angle>=1)) * (A1U_out>=1 + (arm1_pick_up_angle>=1 * A2U_in>=1))))))] = FALSE
Hit Full ! (commute/partial/dont) 147/31/55
(forward)formula 5,0,191.961,2454240,1,0,2123,1.73677e+07,51,908,4490,1.14466e+07,15
FORMULA ParamProductionCell-PT-5-CTLFireability-5 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is FALSE !
***************************************
original formula: EF((AX(((A1L_rot1_run>=1 * arm1_pick_up_angle>=1) + (PL_lower_run>=1 * press_at_middle_pos>=1))) + EG(!((A1L_loaded>=1 * arm1_stop>=1)))))
=> equivalent forward existential formula: ([(FwdU(Init,TRUE) * !(EX(!(((A1L_rot1_run>=1 * arm1_pick_up_angle>=1) + (PL_lower_run>=1 * press_at_middle_pos>=1))))))] != FALSE + [FwdG(FwdU(Init,TRUE),!((A1L_loaded>=1 * arm1_stop>=1)))] != FALSE)
(forward)formula 6,1,192.103,2454240,1,0,2123,1.73677e+07,60,908,4501,1.14466e+07,20
FORMULA ParamProductionCell-PT-5-CTLFireability-6 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: AG((((TU_lift_run>=1 * table_top_pos>=1) + (!((arm1_release_angle>=1 * A1L_in>=1)) + ((forge_run>=1 * press_at_middle_pos>=1) * press_upward>=1))) + ((((A2U_rot2_rs>=1 * robot_left>=1) + (A2L_rot3_in>=1 * robot_stop>=1)) * ((A1L_rot1_run>=1 * arm1_release_angle>=1) * robot_left>=1)) + EX((A2L_rot2_in>=1 * robot_stop>=1)))))
=> equivalent forward existential formula: [(((FwdU(Init,TRUE) * !(((TU_lift_run>=1 * table_top_pos>=1) + (!((arm1_release_angle>=1 * A1L_in>=1)) + ((forge_run>=1 * press_at_middle_pos>=1) * press_upward>=1))))) * !((((A2U_rot2_rs>=1 * robot_left>=1) + (A2L_rot3_in>=1 * robot_stop>=1)) * ((A1L_rot1_run>=1 * arm1_release_angle>=1) * robot_left>=1)))) * !(EX((A2L_rot2_in>=1 * robot_stop>=1))))] = FALSE
(forward)formula 7,0,192.195,2454240,1,0,2123,1.73677e+07,96,908,4541,1.14466e+07,27
FORMULA ParamProductionCell-PT-5-CTLFireability-7 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is FALSE !
***************************************
original formula: A(!((A1L_loaded>=1 * arm1_stop>=1)) U EG((feed_belt_occupied>=1 * ch_FT_free>=1)))
=> equivalent forward existential formula: [((Init * !(EG(!(EG((feed_belt_occupied>=1 * ch_FT_free>=1)))))) * !(E(!(EG((feed_belt_occupied>=1 * ch_FT_free>=1))) U (!(!((A1L_loaded>=1 * arm1_stop>=1))) * !(EG((feed_belt_occupied>=1 * ch_FT_free>=1)))))))] != FALSE
(forward)formula 8,0,204.938,2454240,1,0,2123,1.73677e+07,113,908,4769,1.14466e+07,1193
FORMULA ParamProductionCell-PT-5-CTLFireability-8 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is FALSE !
***************************************
original formula: EF(EG((A1L_rot2_run>=1 * arm1_pick_up_angle>=1)))
=> equivalent forward existential formula: [FwdG(FwdU(Init,TRUE),(A1L_rot2_run>=1 * arm1_pick_up_angle>=1))] != FALSE
Hit Full ! (commute/partial/dont) 189/11/13
(forward)formula 9,0,205.134,2454240,1,0,2123,1.73677e+07,122,908,5060,1.14466e+07,1197
FORMULA ParamProductionCell-PT-5-CTLFireability-9 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is FALSE !
***************************************
original formula: AF(((feed_belt_idle>=1 * ch_CF_full>=1) * AF(((A1L_rot3_run>=1 * arm2_release_angle>=1) * robot_left>=1))))
=> equivalent forward existential formula: [FwdG(Init,!(((feed_belt_idle>=1 * ch_CF_full>=1) * !(EG(!(((A1L_rot3_run>=1 * arm2_release_angle>=1) * robot_left>=1)))))))] = FALSE
(forward)formula 10,0,231.916,2454240,1,0,2123,1.73677e+07,140,1118,5070,1.14466e+07,2143
FORMULA ParamProductionCell-PT-5-CTLFireability-10 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is FALSE !
***************************************
original formula: AX((!((CU_trans_rs>=1 * crane_to_belt2>=1)) * (AF(((TL_lower_run>=1 * table_upward>=1) * table_top_pos>=1)) + EF((arm2_release_angle>=1 * A1L_in>=1)))))
=> equivalent forward existential formula: ([(EY(Init) * (CU_trans_rs>=1 * crane_to_belt2>=1))] = FALSE * [FwdG((EY(Init) * !(E(TRUE U (arm2_release_angle>=1 * A1L_in>=1)))),!(((TL_lower_run>=1 * table_upward>=1) * table_top_pos>=1)))] = FALSE)
(forward)formula 11,1,247.468,2468696,1,0,2166,1.73677e+07,158,1211,5083,1.26954e+07,2377
FORMULA ParamProductionCell-PT-5-CTLFireability-11 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: AF(!((EF((PL_lower_rs>=1 * press_up>=1)) * !(((belt2_stop>=1 * DB_at_end>=1) + (A1L_rot1_in>=1 * robot_stop>=1))))))
=> equivalent forward existential formula: [FwdG(Init,!(!((E(TRUE U (PL_lower_rs>=1 * press_up>=1)) * !(((belt2_stop>=1 * DB_at_end>=1) + (A1L_rot1_in>=1 * robot_stop>=1)))))))] = FALSE
(forward)formula 12,1,295.288,2698444,1,0,2238,1.73677e+07,20,1250,4364,1.37049e+07,411
FORMULA ParamProductionCell-PT-5-CTLFireability-12 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: AX(!(EF(((FB_deliver_run>=1 * belt1_light_barrier_false>=1) * (belt2_stop>=1 * DB_at_end>=1)))))
=> equivalent forward existential formula: [(FwdU(EY(Init),TRUE) * ((FB_deliver_run>=1 * belt1_light_barrier_false>=1) * (belt2_stop>=1 * DB_at_end>=1)))] = FALSE
(forward)formula 13,0,295.7,2698444,1,0,2238,1.73677e+07,34,1250,4655,1.37049e+07,416
FORMULA ParamProductionCell-PT-5-CTLFireability-13 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is FALSE !
***************************************
original formula: E(EF(!(((A1L_ret_run>=1 * arm1_pick_up_ext>=1) * arm1_backward>=1))) U (AG(((A2U_rot3_run>=1 * arm2_pick_up_angle>=1) * robot_right>=1)) * (((arm1_pick_up_angle>=1 * A1U_in>=1) + (belt2_stop>=1 * DB_at_end>=1)) + (arm2_having_swivel_2>=1 * (A1L_rot1_rs>=1 * robot_left>=1)))))
=> equivalent forward existential formula: [((FwdU(Init,E(TRUE U !(((A1L_ret_run>=1 * arm1_pick_up_ext>=1) * arm1_backward>=1)))) * (((arm1_pick_up_angle>=1 * A1U_in>=1) + (belt2_stop>=1 * DB_at_end>=1)) + (arm2_having_swivel_2>=1 * (A1L_rot1_rs>=1 * robot_left>=1)))) * !(E(TRUE U !(((A2U_rot3_run>=1 * arm2_pick_up_angle>=1) * robot_right>=1)))))] != FALSE
(forward)formula 14,0,295.724,2698444,1,0,2238,1.73677e+07,42,1250,4664,1.37049e+07,419
FORMULA ParamProductionCell-PT-5-CTLFireability-14 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is FALSE !
***************************************
original formula: AF(AX((arm1_stop>=1 * A1L_rotated>=1)))
=> equivalent forward existential formula: [FwdG(Init,!(!(EX(!((arm1_stop>=1 * A1L_rotated>=1))))))] = FALSE
(forward)formula 15,0,314.345,2698444,1,0,2238,1.73677e+07,50,1250,4669,1.37049e+07,999
FORMULA ParamProductionCell-PT-5-CTLFireability-15 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is FALSE !
***************************************
Exit code :0
BK_STOP 1496302037007
--------------------
content from stderr:
+ export BINDIR=/home/mcc/BenchKit/
+ BINDIR=/home/mcc/BenchKit/
++ pwd
+ export MODEL=/home/mcc/execution
+ MODEL=/home/mcc/execution
+ [[ CTLFireability = StateSpace ]]
+ /home/mcc/BenchKit//runeclipse.sh /home/mcc/execution CTLFireability -its -ltsminpath /home/mcc/BenchKit//lts_install_dir/ -smt
+ ulimit -s 65536
+ java -Dosgi.requiredJavaVersion=1.6 -Xss8m -Xms40m -Xmx8192m -Declipse.pde.launch=true -Dfile.encoding=UTF-8 -classpath /home/mcc/BenchKit//eclipse/plugins/org.eclipse.equinox.launcher_1.3.201.v20161025-1711.jar org.eclipse.equinox.launcher.Main -application fr.lip6.move.gal.application.pnmcc -data /home/mcc/BenchKit//workspace -os linux -ws gtk -arch x86_64 -nl en_US -consoleLog -pnfolder /home/mcc/execution -examination CTLFireability -yices2path /home/mcc/BenchKit//yices/bin/yices -its -ltsminpath /home/mcc/BenchKit//lts_install_dir/ -smt
Jun 01, 2017 7:22:01 AM fr.lip6.move.gal.application.MccTranslator transformPNML
INFO: Parsing pnml file : /home/mcc/execution/model.pnml
Jun 01, 2017 7:22:01 AM fr.lip6.move.gal.nupn.PTNetReader loadFromXML
INFO: Load time of PNML (sax parser for PT used): 101 ms
Jun 01, 2017 7:22:01 AM fr.lip6.move.gal.pnml.togal.PTGALTransformer handlePage
INFO: Transformed 231 places.
Jun 01, 2017 7:22:01 AM fr.lip6.move.gal.pnml.togal.PTGALTransformer handlePage
INFO: Transformed 202 transitions.
Jun 01, 2017 7:22:01 AM fr.lip6.move.gal.instantiate.GALRewriter flatten
INFO: Flatten gal took : 50 ms
Jun 01, 2017 7:22:01 AM fr.lip6.move.serialization.SerializationUtil systemToFile
INFO: Time to serialize gal into /home/mcc/execution/CTLFireability.pnml.gal : 13 ms
Jun 01, 2017 7:22:01 AM fr.lip6.move.serialization.SerializationUtil serializePropertiesForITSCTLTools
INFO: Time to serialize properties into /home/mcc/execution/CTLFireability.ctl : 2 ms
Jun 01, 2017 7:27:16 AM fr.lip6.move.gal.itstools.Runner runTool
INFO: Standard error output from running tool CommandLine [args=[/home/mcc/BenchKit/eclipse/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.201705302212/bin/its-ctl-linux64, --gc-threshold, 2000000, --quiet, -i, /home/mcc/execution/CTLFireability.pnml.gal, -t, CGAL, -ctl, /home/mcc/execution/CTLFireability.ctl], workingDir=/home/mcc/execution]
Reverse transition relation is NOT exact ! Due to transitions PU_lower_Pstart, forge_Pstart, PL_lower_Pstart, TL_rot_Pstart, TL_lower_Pstart, TU_lift_Pstart, TU_rot_Pstart, DB_trans_Pstart, DB_deliver_Pstart, FB_trans_Pstart, FB_deliver_Pstart, arm2_unlock_swivel_1, arm2_unlock_swivel_2, A2U_rot1_Pstop, A2U_rot1_Pstart, A2U_rot2_Pstop, A2U_rot2_Pstart, A2U_rot3_Pstop, A2U_rot3_Pstart, A2U_ext_Pstart, A2U_ret_Pstart, A2L_rot1_Pstop, A2L_rot1_Pstart, A2L_rot2_Pstop, A2L_rot2_Pstart, A2L_rot3_Pstart, A2L_ext_Pstart, A2L_ret_Pstart, arm1_unlock_swivel_1, arm1_unlock_swivel_2, A1L_rot1_Pstop, A1L_rot1_Pstart, A1L_rot2_Pstop, A1L_rot2_Pstart, A1L_rot3_Pstop, A1L_rot3_Pstart, A1L_ext_Pstart, A1L_ret_Pstart, A1U_rot1_Pstart, A1U_rot2_Pstop, A1U_rot2_Pstart, A1U_rot3_Pstop, A1U_rot3_Pstart, A1U_ext_Pstart, A1U_ret_Pstart, CU_lift_Pstart, CU_trans_Pstart, CU_lower_Pstart, CL_lower_Pstart, CL_trans_Pstart, CL_lift_Pstart, Intersection with reachable at each step enabled. (destroyed/reverse/intersect/total) :0/151/51/202
fixpoint of localApply rewriting as localApply of fixpoint
fixpoint of localApply rewriting as localApply of fixpoint
fixpoint of localApply rewriting as localApply of fixpoint
fixpoint of localApply rewriting as localApply of fixpoint
fixpoint of localApply rewriting as localApply of fixpoint
fixpoint of localApply rewriting as localApply of fixpoint
fixpoint of localApply rewriting as localApply of fixpoint
fixpoint of localApply rewriting as localApply of fixpoint
fixpoint of localApply rewriting as localApply of fixpoint
fixpoint of localApply rewriting as localApply of fixpoint
Sequence of Actions to be Executed by the VM
This is useful if one wants to reexecute the tool in the VM from the submitted image disk.
set -x
# this is for BenchKit: configuration of major elements for the test
export BK_INPUT="ParamProductionCell-PT-5"
export BK_EXAMINATION="CTLFireability"
export BK_TOOL="itstools"
export BK_RESULT_DIR="/tmp/BK_RESULTS/OUTPUTS"
export BK_TIME_CONFINEMENT="3600"
export BK_MEMORY_CONFINEMENT="16384"
# this is specific to your benchmark or test
export BIN_DIR="$HOME/BenchKit/bin"
# remove the execution directoty if it exists (to avoid increse of .vmdk images)
if [ -d execution ] ; then
rm -rf execution
fi
tar xzf /home/mcc/BenchKit/INPUTS/ParamProductionCell-PT-5.tgz
mv ParamProductionCell-PT-5 execution
# this is for BenchKit: explicit launching of the test
cd execution
echo "====================================================================="
echo " Generated by BenchKit 2-3254"
echo " Executing tool itstools"
echo " Input is ParamProductionCell-PT-5, examination is CTLFireability"
echo " Time confinement is $BK_TIME_CONFINEMENT seconds"
echo " Memory confinement is 16384 MBytes"
echo " Number of cores is 4"
echo " Run identifier is r040-blw7-149440486500319"
echo "====================================================================="
echo
echo "--------------------"
echo "content from stdout:"
echo
echo "=== Data for post analysis generated by BenchKit (invocation template)"
echo
if [ "CTLFireability" = "UpperBounds" ] ; then
echo "The expected result is a vector of positive values"
echo NUM_VECTOR
elif [ "CTLFireability" != "StateSpace" ] ; then
echo "The expected result is a vector of booleans"
echo BOOL_VECTOR
else
echo "no data necessary for post analysis"
fi
echo
if [ -f "CTLFireability.txt" ] ; then
echo "here is the order used to build the result vector(from text file)"
for x in $(grep Property CTLFireability.txt | cut -d ' ' -f 2 | sort -u) ; do
echo "FORMULA_NAME $x"
done
elif [ -f "CTLFireability.xml" ] ; then # for cunf (txt files deleted;-)
echo echo "here is the order used to build the result vector(from xml file)"
for x in $(grep '
echo "FORMULA_NAME $x"
done
fi
echo
echo "=== Now, execution of the tool begins"
echo
echo -n "BK_START "
date -u +%s%3N
echo
timeout -s 9 $BK_TIME_CONFINEMENT bash -c "/home/mcc/BenchKit/BenchKit_head.sh 2> STDERR ; echo ; echo -n \"BK_STOP \" ; date -u +%s%3N"
if [ $? -eq 137 ] ; then
echo
echo "BK_TIME_CONFINEMENT_REACHED"
fi
echo
echo "--------------------"
echo "content from stderr:"
echo
cat STDERR ;