
About the Execution of Marcie for AirplaneLD-COL-0020
| Execution Summary | |||||
| Max Memory Used (MB) |
Time wait (ms) | CPU Usage (ms) | I/O Wait (ms) | Computed Result | Execution Status |
| 5539.410 | 3600000.00 | 3599990.00 | 20.00 | TTTTTT???T?TF?T? | normal |
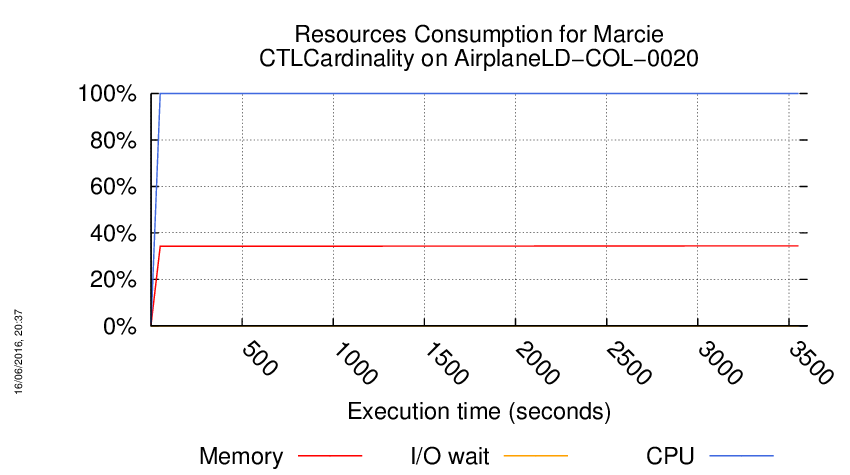
Execution Chart
We display below the execution chart for this examination (boot time has been removed).
Trace from the execution
Waiting for the VM to be ready (probing ssh)
......
=====================================================================
Generated by BenchKit 2-2979
Executing tool marcie
Input is AirplaneLD-COL-0020, examination is CTLCardinality
Time confinement is 3600 seconds
Memory confinement is 16384 MBytes
Number of cores is 1
Run identifier is r209su-blw3-146445824100012
=====================================================================
--------------------
content from stdout:
=== Data for post analysis generated by BenchKit (invocation template)
The expected result is a vector of booleans
BOOL_VECTOR
here is the order used to build the result vector(from text file)
FORMULA_NAME AirplaneLD-COL-0020-CTLCardinality-0
FORMULA_NAME AirplaneLD-COL-0020-CTLCardinality-1
FORMULA_NAME AirplaneLD-COL-0020-CTLCardinality-10
FORMULA_NAME AirplaneLD-COL-0020-CTLCardinality-11
FORMULA_NAME AirplaneLD-COL-0020-CTLCardinality-12
FORMULA_NAME AirplaneLD-COL-0020-CTLCardinality-13
FORMULA_NAME AirplaneLD-COL-0020-CTLCardinality-14
FORMULA_NAME AirplaneLD-COL-0020-CTLCardinality-15
FORMULA_NAME AirplaneLD-COL-0020-CTLCardinality-2
FORMULA_NAME AirplaneLD-COL-0020-CTLCardinality-3
FORMULA_NAME AirplaneLD-COL-0020-CTLCardinality-4
FORMULA_NAME AirplaneLD-COL-0020-CTLCardinality-5
FORMULA_NAME AirplaneLD-COL-0020-CTLCardinality-6
FORMULA_NAME AirplaneLD-COL-0020-CTLCardinality-7
FORMULA_NAME AirplaneLD-COL-0020-CTLCardinality-8
FORMULA_NAME AirplaneLD-COL-0020-CTLCardinality-9
=== Now, execution of the tool begins
BK_START 1464674238409
Marcie rev. 8535M (built: crohr on 2016-04-27)
A model checker for Generalized Stochastic Petri nets
authors: Alex Tovchigrechko (IDD package and CTL model checking)
Martin Schwarick (Symbolic numerical analysis and CSL model checking)
Christian Rohr (Simulative and approximative numerical model checking)
marcie@informatik.tu-cottbus.de
called as: marcie --net-file=model.pnml --mcc-file=CTLCardinality.xml --mcc-mode --memory=6 --suppress
parse successfull
net created successfully
Unfolding complete |P|=159|T|=168|A|=638
Time for unfolding: 0m 1.114sec
Net: AirplaneLD_COL_0020
(NrP: 159 NrTr: 168 NrArc: 638)
net check time: 0m 0.000sec
parse formulas
formulas created successfully
place and transition orderings generation:0m 0.002sec
init dd package: 0m 3.398sec
RS generation: 0m 0.117sec
-> reachability set: #nodes 621 (6.2e+02) #states 308,303 (5)
starting MCC model checker
--------------------------
checking: E [EX [2<=P6_dot] U EF [1<=P6_dot]]
normalized: E [EX [2<=P6_dot] U E [true U 1<=P6_dot]]
abstracting: (1<=P6_dot) states: 72,788 (4)
abstracting: (2<=P6_dot) states: 0
.-> the formula is TRUE
FORMULA AirplaneLD-COL-0020-CTLCardinality-3 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 2.414sec
checking: ~ [EG [P2_dot<=P2_dot]]
normalized: ~ [EG [P2_dot<=P2_dot]]
abstracting: (P2_dot<=P2_dot) states: 308,303 (5)
EG iterations: 0
-> the formula is FALSE
FORMULA AirplaneLD-COL-0020-CTLCardinality-6 FALSE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.000sec
checking: AG [[3<=P1_dot | ~ [[2<=P4_dot & 2<=stp1_dot]]]]
normalized: ~ [E [true U ~ [[3<=P1_dot | ~ [[2<=P4_dot & 2<=stp1_dot]]]]]]
abstracting: (2<=stp1_dot) states: 0
abstracting: (2<=P4_dot) states: 0
abstracting: (3<=P1_dot) states: 0
-> the formula is TRUE
FORMULA AirplaneLD-COL-0020-CTLCardinality-13 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.001sec
checking: E [stp5_dot<=stp1_dot U AG [P5_dot<=sum(Weight_Right_Wheel_Weight1, Weight_Right_Wheel_Weight0)]]
normalized: E [stp5_dot<=stp1_dot U ~ [E [true U ~ [P5_dot<=sum(Weight_Right_Wheel_Weight1, Weight_Right_Wheel_Weight0)]]]]
abstracting: (P5_dot<=sum(Weight_Right_Wheel_Weight1, Weight_Right_Wheel_Weight0)) states: 308,282 (5)
abstracting: (stp5_dot<=stp1_dot) states: 296,205 (5)
-> the formula is TRUE
FORMULA AirplaneLD-COL-0020-CTLCardinality-1 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 1.601sec
checking: [~ [EX [[stp4_dot<=sum(Weight_Left_Wheel_Weight1, Weight_Left_Wheel_Weight0) & 1<=P1_dot]]] | EX [AF [1<=sum(Plane_On_Ground_Signal_no_Signal1, Plane_On_Ground_Signal_no_Signal0)]]]
normalized: [~ [EX [[stp4_dot<=sum(Weight_Left_Wheel_Weight1, Weight_Left_Wheel_Weight0) & 1<=P1_dot]]] | EX [~ [EG [~ [1<=sum(Plane_On_Ground_Signal_no_Signal1, Plane_On_Ground_Signal_no_Signal0)]]]]]
abstracting: (1<=sum(Plane_On_Ground_Signal_no_Signal1, Plane_On_Ground_Signal_no_Signal0)) states: 72,788 (4)
...........
EG iterations: 11
.abstracting: (1<=P1_dot) states: 162,729 (5)
abstracting: (stp4_dot<=sum(Weight_Left_Wheel_Weight1, Weight_Left_Wheel_Weight0)) states: 298,790 (5)
.-> the formula is TRUE
FORMULA AirplaneLD-COL-0020-CTLCardinality-5 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.198sec
checking: ~ [[E [P6_dot<=stp5_dot U 3<=P5_dot] & [AG [sum(Plane_On_Ground_Signal_no_Signal1, Plane_On_Ground_Signal_no_Signal0)<=sum(Weight_Left_Wheel_Weight1, Weight_Left_Wheel_Weight0)] | AG [P2_dot<=stp1_dot]]]]
normalized: ~ [[[~ [E [true U ~ [P2_dot<=stp1_dot]]] | ~ [E [true U ~ [sum(Plane_On_Ground_Signal_no_Signal1, Plane_On_Ground_Signal_no_Signal0)<=sum(Weight_Left_Wheel_Weight1, Weight_Left_Wheel_Weight0)]]]] & E [P6_dot<=stp5_dot U 3<=P5_dot]]]
abstracting: (3<=P5_dot) states: 0
abstracting: (P6_dot<=stp5_dot) states: 238,981 (5)
abstracting: (sum(Plane_On_Ground_Signal_no_Signal1, Plane_On_Ground_Signal_no_Signal0)<=sum(Weight_Left_Wheel_Weight1, Weight_Left_Wheel_Weight0)) states: 235,515 (5)
abstracting: (P2_dot<=stp1_dot) states: 254,060 (5)
-> the formula is TRUE
FORMULA AirplaneLD-COL-0020-CTLCardinality-12 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.100sec
checking: ~ [[[~ [[1<=P6_dot | 1<=sum(Speed_Right_Wheel_Speed9, Speed_Right_Wheel_Speed8, Speed_Right_Wheel_Speed7, Speed_Right_Wheel_Speed6, Speed_Right_Wheel_Speed5, Speed_Right_Wheel_Speed4, Speed_Right_Wheel_Speed3, Speed_Right_Wheel_Speed20, Speed_Right_Wheel_Speed2, Speed_Right_Wheel_Speed19, Speed_Right_Wheel_Speed18, Speed_Right_Wheel_Speed17, Speed_Right_Wheel_Speed16, Speed_Right_Wheel_Speed15, Speed_Right_Wheel_Speed14, Speed_Right_Wheel_Speed13, Speed_Right_Wheel_Speed12, Speed_Right_Wheel_Speed11, Speed_Right_Wheel_Speed10, Speed_Right_Wheel_Speed1)]] | ~ [stp5_dot<=stp1_dot]] & AF [3<=stp4_dot]]]
normalized: ~ [[~ [EG [~ [3<=stp4_dot]]] & [~ [stp5_dot<=stp1_dot] | ~ [[1<=P6_dot | 1<=sum(Speed_Right_Wheel_Speed9, Speed_Right_Wheel_Speed8, Speed_Right_Wheel_Speed7, Speed_Right_Wheel_Speed6, Speed_Right_Wheel_Speed5, Speed_Right_Wheel_Speed4, Speed_Right_Wheel_Speed3, Speed_Right_Wheel_Speed20, Speed_Right_Wheel_Speed2, Speed_Right_Wheel_Speed19, Speed_Right_Wheel_Speed18, Speed_Right_Wheel_Speed17, Speed_Right_Wheel_Speed16, Speed_Right_Wheel_Speed15, Speed_Right_Wheel_Speed14, Speed_Right_Wheel_Speed13, Speed_Right_Wheel_Speed12, Speed_Right_Wheel_Speed11, Speed_Right_Wheel_Speed10, Speed_Right_Wheel_Speed1)]]]]]
abstracting: (1<=sum(Speed_Right_Wheel_Speed9, Speed_Right_Wheel_Speed8, Speed_Right_Wheel_Speed7, Speed_Right_Wheel_Speed6, Speed_Right_Wheel_Speed5, Speed_Right_Wheel_Speed4, Speed_Right_Wheel_Speed3, Speed_Right_Wheel_Speed20, Speed_Right_Wheel_Speed2, Speed_Right_Wheel_Speed19, Speed_Right_Wheel_Speed18, Speed_Right_Wheel_Speed17, Speed_Right_Wheel_Speed16, Speed_Right_Wheel_Speed15, Speed_Right_Wheel_Speed14, Speed_Right_Wheel_Speed13, Speed_Right_Wheel_Speed12, Speed_Right_Wheel_Speed11, Speed_Right_Wheel_Speed10, Speed_Right_Wheel_Speed1)) states: 293,620 (5)
abstracting: (1<=P6_dot) states: 72,788 (4)
abstracting: (stp5_dot<=stp1_dot) states: 296,205 (5)
abstracting: (3<=stp4_dot) states: 0
EG iterations: 0
-> the formula is TRUE
FORMULA AirplaneLD-COL-0020-CTLCardinality-8 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.475sec
checking: A [~ [[2<=stp3_dot & 1<=sum(WeightPossibleVal_Weight1, WeightPossibleVal_Weight0)]] U EG [stp3_dot<=sum(Speed_Right_Wheel_Speed9, Speed_Right_Wheel_Speed8, Speed_Right_Wheel_Speed7, Speed_Right_Wheel_Speed6, Speed_Right_Wheel_Speed5, Speed_Right_Wheel_Speed4, Speed_Right_Wheel_Speed3, Speed_Right_Wheel_Speed20, Speed_Right_Wheel_Speed2, Speed_Right_Wheel_Speed19, Speed_Right_Wheel_Speed18, Speed_Right_Wheel_Speed17, Speed_Right_Wheel_Speed16, Speed_Right_Wheel_Speed15, Speed_Right_Wheel_Speed14, Speed_Right_Wheel_Speed13, Speed_Right_Wheel_Speed12, Speed_Right_Wheel_Speed11, Speed_Right_Wheel_Speed10, Speed_Right_Wheel_Speed1)]]
normalized: [~ [EG [~ [EG [stp3_dot<=sum(Speed_Right_Wheel_Speed9, Speed_Right_Wheel_Speed8, Speed_Right_Wheel_Speed7, Speed_Right_Wheel_Speed6, Speed_Right_Wheel_Speed5, Speed_Right_Wheel_Speed4, Speed_Right_Wheel_Speed3, Speed_Right_Wheel_Speed20, Speed_Right_Wheel_Speed2, Speed_Right_Wheel_Speed19, Speed_Right_Wheel_Speed18, Speed_Right_Wheel_Speed17, Speed_Right_Wheel_Speed16, Speed_Right_Wheel_Speed15, Speed_Right_Wheel_Speed14, Speed_Right_Wheel_Speed13, Speed_Right_Wheel_Speed12, Speed_Right_Wheel_Speed11, Speed_Right_Wheel_Speed10, Speed_Right_Wheel_Speed1)]]]] & ~ [E [~ [EG [stp3_dot<=sum(Speed_Right_Wheel_Speed9, Speed_Right_Wheel_Speed8, Speed_Right_Wheel_Speed7, Speed_Right_Wheel_Speed6, Speed_Right_Wheel_Speed5, Speed_Right_Wheel_Speed4, Speed_Right_Wheel_Speed3, Speed_Right_Wheel_Speed20, Speed_Right_Wheel_Speed2, Speed_Right_Wheel_Speed19, Speed_Right_Wheel_Speed18, Speed_Right_Wheel_Speed17, Speed_Right_Wheel_Speed16, Speed_Right_Wheel_Speed15, Speed_Right_Wheel_Speed14, Speed_Right_Wheel_Speed13, Speed_Right_Wheel_Speed12, Speed_Right_Wheel_Speed11, Speed_Right_Wheel_Speed10, Speed_Right_Wheel_Speed1)]] U [~ [EG [stp3_dot<=sum(Speed_Right_Wheel_Speed9, Speed_Right_Wheel_Speed8, Speed_Right_Wheel_Speed7, Speed_Right_Wheel_Speed6, Speed_Right_Wheel_Speed5, Speed_Right_Wheel_Speed4, Speed_Right_Wheel_Speed3, Speed_Right_Wheel_Speed20, Speed_Right_Wheel_Speed2, Speed_Right_Wheel_Speed19, Speed_Right_Wheel_Speed18, Speed_Right_Wheel_Speed17, Speed_Right_Wheel_Speed16, Speed_Right_Wheel_Speed15, Speed_Right_Wheel_Speed14, Speed_Right_Wheel_Speed13, Speed_Right_Wheel_Speed12, Speed_Right_Wheel_Speed11, Speed_Right_Wheel_Speed10, Speed_Right_Wheel_Speed1)]] & [2<=stp3_dot & 1<=sum(WeightPossibleVal_Weight1, WeightPossibleVal_Weight0)]]]]]
abstracting: (1<=sum(WeightPossibleVal_Weight1, WeightPossibleVal_Weight0)) states: 308,303 (5)
abstracting: (2<=stp3_dot) states: 0
abstracting: (stp3_dot<=sum(Speed_Right_Wheel_Speed9, Speed_Right_Wheel_Speed8, Speed_Right_Wheel_Speed7, Speed_Right_Wheel_Speed6, Speed_Right_Wheel_Speed5, Speed_Right_Wheel_Speed4, Speed_Right_Wheel_Speed3, Speed_Right_Wheel_Speed20, Speed_Right_Wheel_Speed2, Speed_Right_Wheel_Speed19, Speed_Right_Wheel_Speed18, Speed_Right_Wheel_Speed17, Speed_Right_Wheel_Speed16, Speed_Right_Wheel_Speed15, Speed_Right_Wheel_Speed14, Speed_Right_Wheel_Speed13, Speed_Right_Wheel_Speed12, Speed_Right_Wheel_Speed11, Speed_Right_Wheel_Speed10, Speed_Right_Wheel_Speed1)) states: 307,946 (5)
.
EG iterations: 1
abstracting: (stp3_dot<=sum(Speed_Right_Wheel_Speed9, Speed_Right_Wheel_Speed8, Speed_Right_Wheel_Speed7, Speed_Right_Wheel_Speed6, Speed_Right_Wheel_Speed5, Speed_Right_Wheel_Speed4, Speed_Right_Wheel_Speed3, Speed_Right_Wheel_Speed20, Speed_Right_Wheel_Speed2, Speed_Right_Wheel_Speed19, Speed_Right_Wheel_Speed18, Speed_Right_Wheel_Speed17, Speed_Right_Wheel_Speed16, Speed_Right_Wheel_Speed15, Speed_Right_Wheel_Speed14, Speed_Right_Wheel_Speed13, Speed_Right_Wheel_Speed12, Speed_Right_Wheel_Speed11, Speed_Right_Wheel_Speed10, Speed_Right_Wheel_Speed1)) states: 307,946 (5)
.
EG iterations: 1
abstracting: (stp3_dot<=sum(Speed_Right_Wheel_Speed9, Speed_Right_Wheel_Speed8, Speed_Right_Wheel_Speed7, Speed_Right_Wheel_Speed6, Speed_Right_Wheel_Speed5, Speed_Right_Wheel_Speed4, Speed_Right_Wheel_Speed3, Speed_Right_Wheel_Speed20, Speed_Right_Wheel_Speed2, Speed_Right_Wheel_Speed19, Speed_Right_Wheel_Speed18, Speed_Right_Wheel_Speed17, Speed_Right_Wheel_Speed16, Speed_Right_Wheel_Speed15, Speed_Right_Wheel_Speed14, Speed_Right_Wheel_Speed13, Speed_Right_Wheel_Speed12, Speed_Right_Wheel_Speed11, Speed_Right_Wheel_Speed10, Speed_Right_Wheel_Speed1)) states: 307,946 (5)
.
EG iterations: 1
.......
EG iterations: 7
-> the formula is TRUE
FORMULA AirplaneLD-COL-0020-CTLCardinality-10 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 2.947sec
checking: [EG [EF [P4_dot<=P4_dot]] | EG [~ [[3<=sum(SpeedPossibleVal_Speed9, SpeedPossibleVal_Speed8, SpeedPossibleVal_Speed7, SpeedPossibleVal_Speed6, SpeedPossibleVal_Speed5, SpeedPossibleVal_Speed4, SpeedPossibleVal_Speed3, SpeedPossibleVal_Speed20, SpeedPossibleVal_Speed2, SpeedPossibleVal_Speed19, SpeedPossibleVal_Speed18, SpeedPossibleVal_Speed17, SpeedPossibleVal_Speed16, SpeedPossibleVal_Speed15, SpeedPossibleVal_Speed14, SpeedPossibleVal_Speed13, SpeedPossibleVal_Speed12, SpeedPossibleVal_Speed11, SpeedPossibleVal_Speed10, SpeedPossibleVal_Speed1) | sum(Weight_Left_Wheel_Weight1, Weight_Left_Wheel_Weight0)<=P1_dot]]]]
normalized: [EG [~ [[3<=sum(SpeedPossibleVal_Speed9, SpeedPossibleVal_Speed8, SpeedPossibleVal_Speed7, SpeedPossibleVal_Speed6, SpeedPossibleVal_Speed5, SpeedPossibleVal_Speed4, SpeedPossibleVal_Speed3, SpeedPossibleVal_Speed20, SpeedPossibleVal_Speed2, SpeedPossibleVal_Speed19, SpeedPossibleVal_Speed18, SpeedPossibleVal_Speed17, SpeedPossibleVal_Speed16, SpeedPossibleVal_Speed15, SpeedPossibleVal_Speed14, SpeedPossibleVal_Speed13, SpeedPossibleVal_Speed12, SpeedPossibleVal_Speed11, SpeedPossibleVal_Speed10, SpeedPossibleVal_Speed1) | sum(Weight_Left_Wheel_Weight1, Weight_Left_Wheel_Weight0)<=P1_dot]]] | EG [E [true U P4_dot<=P4_dot]]]
abstracting: (P4_dot<=P4_dot) states: 308,303 (5)
EG iterations: 0
abstracting: (sum(Weight_Left_Wheel_Weight1, Weight_Left_Wheel_Weight0)<=P1_dot) states: 308,303 (5)
abstracting: (3<=sum(SpeedPossibleVal_Speed9, SpeedPossibleVal_Speed8, SpeedPossibleVal_Speed7, SpeedPossibleVal_Speed6, SpeedPossibleVal_Speed5, SpeedPossibleVal_Speed4, SpeedPossibleVal_Speed3, SpeedPossibleVal_Speed20, SpeedPossibleVal_Speed2, SpeedPossibleVal_Speed19, SpeedPossibleVal_Speed18, SpeedPossibleVal_Speed17, SpeedPossibleVal_Speed16, SpeedPossibleVal_Speed15, SpeedPossibleVal_Speed14, SpeedPossibleVal_Speed13, SpeedPossibleVal_Speed12, SpeedPossibleVal_Speed11, SpeedPossibleVal_Speed10, SpeedPossibleVal_Speed1)) states: 308,303 (5)
.
EG iterations: 1
-> the formula is TRUE
FORMULA AirplaneLD-COL-0020-CTLCardinality-11 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.494sec
checking: EF [[EG [stp2_dot<=stp1_dot] | [[P5_dot<=sum(Speed_Right_Wheel_Speed9, Speed_Right_Wheel_Speed8, Speed_Right_Wheel_Speed7, Speed_Right_Wheel_Speed6, Speed_Right_Wheel_Speed5, Speed_Right_Wheel_Speed4, Speed_Right_Wheel_Speed3, Speed_Right_Wheel_Speed20, Speed_Right_Wheel_Speed2, Speed_Right_Wheel_Speed19, Speed_Right_Wheel_Speed18, Speed_Right_Wheel_Speed17, Speed_Right_Wheel_Speed16, Speed_Right_Wheel_Speed15, Speed_Right_Wheel_Speed14, Speed_Right_Wheel_Speed13, Speed_Right_Wheel_Speed12, Speed_Right_Wheel_Speed11, Speed_Right_Wheel_Speed10, Speed_Right_Wheel_Speed1) | 2<=P2_dot] & 2<=sum(Weight_Left_Wheel_Weight1, Weight_Left_Wheel_Weight0)]]]
normalized: E [true U [[2<=sum(Weight_Left_Wheel_Weight1, Weight_Left_Wheel_Weight0) & [P5_dot<=sum(Speed_Right_Wheel_Speed9, Speed_Right_Wheel_Speed8, Speed_Right_Wheel_Speed7, Speed_Right_Wheel_Speed6, Speed_Right_Wheel_Speed5, Speed_Right_Wheel_Speed4, Speed_Right_Wheel_Speed3, Speed_Right_Wheel_Speed20, Speed_Right_Wheel_Speed2, Speed_Right_Wheel_Speed19, Speed_Right_Wheel_Speed18, Speed_Right_Wheel_Speed17, Speed_Right_Wheel_Speed16, Speed_Right_Wheel_Speed15, Speed_Right_Wheel_Speed14, Speed_Right_Wheel_Speed13, Speed_Right_Wheel_Speed12, Speed_Right_Wheel_Speed11, Speed_Right_Wheel_Speed10, Speed_Right_Wheel_Speed1) | 2<=P2_dot]] | EG [stp2_dot<=stp1_dot]]]
abstracting: (stp2_dot<=stp1_dot) states: 235,979 (5)
.
EG iterations: 1
abstracting: (2<=P2_dot) states: 0
abstracting: (P5_dot<=sum(Speed_Right_Wheel_Speed9, Speed_Right_Wheel_Speed8, Speed_Right_Wheel_Speed7, Speed_Right_Wheel_Speed6, Speed_Right_Wheel_Speed5, Speed_Right_Wheel_Speed4, Speed_Right_Wheel_Speed3, Speed_Right_Wheel_Speed20, Speed_Right_Wheel_Speed2, Speed_Right_Wheel_Speed19, Speed_Right_Wheel_Speed18, Speed_Right_Wheel_Speed17, Speed_Right_Wheel_Speed16, Speed_Right_Wheel_Speed15, Speed_Right_Wheel_Speed14, Speed_Right_Wheel_Speed13, Speed_Right_Wheel_Speed12, Speed_Right_Wheel_Speed11, Speed_Right_Wheel_Speed10, Speed_Right_Wheel_Speed1)) states: 308,302 (5)
abstracting: (2<=sum(Weight_Left_Wheel_Weight1, Weight_Left_Wheel_Weight0)) states: 0
-> the formula is TRUE
FORMULA AirplaneLD-COL-0020-CTLCardinality-0 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m 0.967sec
checking: [EF [[[1<=sum(WeightPossibleVal_Weight1, WeightPossibleVal_Weight0) | sum(Speed_Right_Wheel_Speed9, Speed_Right_Wheel_Speed8, Speed_Right_Wheel_Speed7, Speed_Right_Wheel_Speed6, Speed_Right_Wheel_Speed5, Speed_Right_Wheel_Speed4, Speed_Right_Wheel_Speed3, Speed_Right_Wheel_Speed20, Speed_Right_Wheel_Speed2, Speed_Right_Wheel_Speed19, Speed_Right_Wheel_Speed18, Speed_Right_Wheel_Speed17, Speed_Right_Wheel_Speed16, Speed_Right_Wheel_Speed15, Speed_Right_Wheel_Speed14, Speed_Right_Wheel_Speed13, Speed_Right_Wheel_Speed12, Speed_Right_Wheel_Speed11, Speed_Right_Wheel_Speed10, Speed_Right_Wheel_Speed1)<=stp1_dot] | [stp3_dot<=P2_dot & 3<=P1_dot]]] & EF [3<=P6_dot]]
normalized: [E [true U 3<=P6_dot] & E [true U [[stp3_dot<=P2_dot & 3<=P1_dot] | [1<=sum(WeightPossibleVal_Weight1, WeightPossibleVal_Weight0) | sum(Speed_Right_Wheel_Speed9, Speed_Right_Wheel_Speed8, Speed_Right_Wheel_Speed7, Speed_Right_Wheel_Speed6, Speed_Right_Wheel_Speed5, Speed_Right_Wheel_Speed4, Speed_Right_Wheel_Speed3, Speed_Right_Wheel_Speed20, Speed_Right_Wheel_Speed2, Speed_Right_Wheel_Speed19, Speed_Right_Wheel_Speed18, Speed_Right_Wheel_Speed17, Speed_Right_Wheel_Speed16, Speed_Right_Wheel_Speed15, Speed_Right_Wheel_Speed14, Speed_Right_Wheel_Speed13, Speed_Right_Wheel_Speed12, Speed_Right_Wheel_Speed11, Speed_Right_Wheel_Speed10, Speed_Right_Wheel_Speed1)<=stp1_dot]]]]
abstracting: (sum(Speed_Right_Wheel_Speed9, Speed_Right_Wheel_Speed8, Speed_Right_Wheel_Speed7, Speed_Right_Wheel_Speed6, Speed_Right_Wheel_Speed5, Speed_Right_Wheel_Speed4, Speed_Right_Wheel_Speed3, Speed_Right_Wheel_Speed20, Speed_Right_Wheel_Speed2, Speed_Right_Wheel_Speed19, Speed_Right_Wheel_Speed18, Speed_Right_Wheel_Speed17, Speed_Right_Wheel_Speed16, Speed_Right_Wheel_Speed15, Speed_Right_Wheel_Speed14, Speed_Right_Wheel_Speed13, Speed_Right_Wheel_Speed12, Speed_Right_Wheel_Speed11, Speed_Right_Wheel_Speed10, Speed_Right_Wheel_Speed1)<=stp1_dot) states: 66,343 (4)
abstracting: (1<=sum(WeightPossibleVal_Weight1, WeightPossibleVal_Weight0)) states: 308,303 (5)
abstracting: (3<=P1_dot) states: 0
abstracting: (stp3_dot<=P2_dot) states: 302,129 (5)
BK_TIME_CONFINEMENT_REACHED
--------------------
content from stderr:
check for maximal unmarked siphon
ok
check if there are places and transitions
ok
check if there are transitions without pre-places
ok
check if at least one transition is enabled in m0
ok
check if there are transitions that can never fire
ok
initing FirstDep: 0m 0.000sec
369 594 621
iterations count:3590 (21), effective:94 (0)
initing FirstDep: 0m 0.000sec
667 719 721 723 725 727 774 873 862 877 873 877 875 873 872 871 875 873 872 871 870 869 872 871 870 869 868 872 870 869 868 868 867 870 869 798 796 785 805 803 801 799 889 808 892 895 888 886 886 897 897 886 885 884 888 886 885 884 883 883 886 909 883 882 882 886 884 883 882 903 881 884 883 812 810 799 885 817 815 813 904 788 820 905 903 901 901 905 903 901 900 899 904 902 913 899 898 898 902 900 899 898 897 917 900 899 898 897 897 900 899 898 897 897
iterations count:114739 (682), effective:14741 (87)
iterations count:168 (1), effective:0 (0)
407 407 319 394 405 324
iterations count:6741 (40), effective:1178 (7)
1043 1044 976 976 976 997 995 993 1082 1080 1000 1083 1095 1079 1077 1077 1080 1078 1077 1076 1075 1079 1077 1076 1075 1074 1074 1077 1075 1074 1073 1073 1076 1075 1074 1073 999 983 1075 1006 1004 1002 991 1011 1009 1096 1094 1092 1098 1095 1093 1092 1090 1090 1094 1092 1090 1089 1088 1093 1091 1090 1089 1088 1087 1091 1089 1088 1087 1087 1091 1089 1088 1087 1087 990 1090 1119 1018 1016 1005 1025 1023 1021 1110 1108 1028 1112 1123 1108 1106 1106 1110 1108 1106 1105 1104 1109 1107 1106 1105 1104 1103 1068 1067 1065 1090 1064
iterations count:108827 (647), effective:14104 (83)
667 719 721 723 725 727 774 873 862 877 873 877 875 873 872 871 875 873 872 871 870 869 872 871 870 869 868 872 870 869 868 868 867 870 869 798 796 785 805 803 801 799 889 808 892 895 888 886 886 897 897 886 885 884 888 886 885 884 883 883 886 909 883 882 882 886 884 883 882 903 881 884 883 812 810 799 885 817 815 813 904 788 820 905 903 901 901 905 903 901 900 899 904 902 913 899 898 898 902 900 899 898 897 917 900 899 898 897 897 900 899 898 897 897
iterations count:114739 (682), effective:14741 (87)
iterations count:171 (1), effective:2 (0)
iterations count:168 (1), effective:0 (0)
iterations count:170 (1), effective:1 (0)
iterations count:168 (1), effective:0 (0)
Sequence of Actions to be Executed by the VM
This is useful if one wants to reexecute the tool in the VM from the submitted image disk.
set -x
# this is for BenchKit: configuration of major elements for the test
export BK_INPUT="AirplaneLD-COL-0020"
export BK_EXAMINATION="CTLCardinality"
export BK_TOOL="marcie"
export BK_RESULT_DIR="/home/hulinhub/BK_RESULTS/OUTPUTS"
export BK_TIME_CONFINEMENT="3600"
export BK_MEMORY_CONFINEMENT="16384"
# this is specific to your benchmark or test
export BIN_DIR="$HOME/BenchKit/bin"
# remove the execution directoty if it exists (to avoid increse of .vmdk images)
if [ -d execution ] ; then
rm -rf execution
fi
tar xzf /home/mcc/BenchKit/INPUTS/AirplaneLD-COL-0020.tgz
mv AirplaneLD-COL-0020 execution
# this is for BenchKit: explicit launching of the test
cd execution
echo "====================================================================="
echo " Generated by BenchKit 2-2979"
echo " Executing tool marcie"
echo " Input is AirplaneLD-COL-0020, examination is CTLCardinality"
echo " Time confinement is $BK_TIME_CONFINEMENT seconds"
echo " Memory confinement is 16384 MBytes"
echo " Number of cores is 1"
echo " Run identifier is r209su-blw3-146445824100012"
echo "====================================================================="
echo
echo "--------------------"
echo "content from stdout:"
echo
echo "=== Data for post analysis generated by BenchKit (invocation template)"
echo
if [ "CTLCardinality" = "UpperBounds" ] ; then
echo "The expected result is a vector of positive values"
echo NUM_VECTOR
elif [ "CTLCardinality" != "StateSpace" ] ; then
echo "The expected result is a vector of booleans"
echo BOOL_VECTOR
else
echo "no data necessary for post analysis"
fi
echo
if [ -f "CTLCardinality.txt" ] ; then
echo "here is the order used to build the result vector(from text file)"
for x in $(grep Property CTLCardinality.txt | cut -d ' ' -f 2 | sort -u) ; do
echo "FORMULA_NAME $x"
done
elif [ -f "CTLCardinality.xml" ] ; then # for cunf (txt files deleted;-)
echo echo "here is the order used to build the result vector(from xml file)"
for x in $(grep '
echo "FORMULA_NAME $x"
done
fi
echo
echo "=== Now, execution of the tool begins"
echo
echo -n "BK_START "
date -u +%s%3N
echo
timeout -s 9 $BK_TIME_CONFINEMENT bash -c "/home/mcc/BenchKit/BenchKit_head.sh 2> STDERR ; echo ; echo -n \"BK_STOP \" ; date -u +%s%3N"
if [ $? -eq 137 ] ; then
echo
echo "BK_TIME_CONFINEMENT_REACHED"
fi
echo
echo "--------------------"
echo "content from stderr:"
echo
cat STDERR ;