
About the Execution of ITS-Tools for ParamProductionCell-PT-2
| Execution Summary | |||||
| Max Memory Used (MB) |
Time wait (ms) | CPU Usage (ms) | I/O Wait (ms) | Computed Result | Execution Status |
| 2553.070 | 183288.00 | 191036.00 | 663.40 | TFFTTTTFFTFTTFTT | normal |
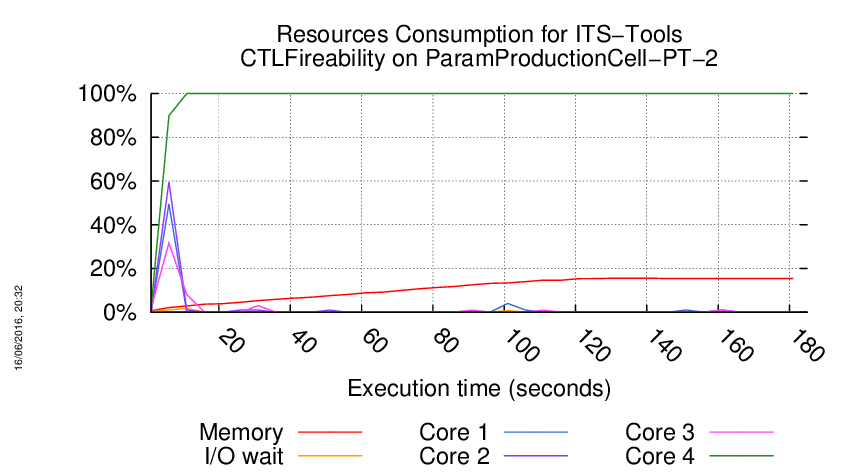
Execution Chart
We display below the execution chart for this examination (boot time has been removed).
Trace from the execution
Waiting for the VM to be ready (probing ssh)
.............
=====================================================================
Generated by BenchKit 2-2979
Executing tool itstools
Input is ParamProductionCell-PT-2, examination is CTLFireability
Time confinement is 3600 seconds
Memory confinement is 16384 MBytes
Number of cores is 4
Run identifier is r073kn-smll-146363809000157
=====================================================================
--------------------
content from stdout:
=== Data for post analysis generated by BenchKit (invocation template)
The expected result is a vector of booleans
BOOL_VECTOR
here is the order used to build the result vector(from text file)
FORMULA_NAME ParamProductionCell-PT-2-CTLFireability-0
FORMULA_NAME ParamProductionCell-PT-2-CTLFireability-1
FORMULA_NAME ParamProductionCell-PT-2-CTLFireability-10
FORMULA_NAME ParamProductionCell-PT-2-CTLFireability-11
FORMULA_NAME ParamProductionCell-PT-2-CTLFireability-12
FORMULA_NAME ParamProductionCell-PT-2-CTLFireability-13
FORMULA_NAME ParamProductionCell-PT-2-CTLFireability-14
FORMULA_NAME ParamProductionCell-PT-2-CTLFireability-15
FORMULA_NAME ParamProductionCell-PT-2-CTLFireability-2
FORMULA_NAME ParamProductionCell-PT-2-CTLFireability-3
FORMULA_NAME ParamProductionCell-PT-2-CTLFireability-4
FORMULA_NAME ParamProductionCell-PT-2-CTLFireability-5
FORMULA_NAME ParamProductionCell-PT-2-CTLFireability-6
FORMULA_NAME ParamProductionCell-PT-2-CTLFireability-7
FORMULA_NAME ParamProductionCell-PT-2-CTLFireability-8
FORMULA_NAME ParamProductionCell-PT-2-CTLFireability-9
=== Now, execution of the tool begins
BK_START 1463986086810
its-ctl command run as :
/home/mcc/BenchKit/eclipse/plugins/fr.lip6.move.gal.itstools.binaries_1.0.0.201605191313/bin/its-ctl-linux64 --gc-threshold 2000000 --quiet -i /home/mcc/execution/CTLFireability.gal -t CGAL -ctl /home/mcc/execution/CTLFireability.ctl
No direction supplied, using forward translation only.
Parsed 16 CTL formulae.
Model ,|S| ,Time ,Mem(kb) ,fin. SDD ,fin. DDD ,peak SDD ,peak DDD ,SDD Hom ,SDD cache peak ,DDD Hom ,DDD cachepeak ,SHom cache
reachable,349874,0.677502,23164,2,11538,5,76250,6,0,1129,58314,0
Converting to forward existential form...Done !
original formula: EF((EF((A1L_rot3_in>=1 * robot_stop>=1)) * AX(((arm2_release_angle>=1 * A1L_in>=1) + ((A2U_ret_run>=1 * arm2_release_ext>=1) * arm2_backward>=1)))))
=> equivalent forward existential formula: [((FwdU(Init,TRUE) * E(TRUE U (A1L_rot3_in>=1 * robot_stop>=1))) * !(EX(!(((arm2_release_angle>=1 * A1L_in>=1) + ((A2U_ret_run>=1 * arm2_release_ext>=1) * arm2_backward>=1))))))] != FALSE
Checking (exact) 0 :[((FwdU(Init,TRUE) * E(TRUE U (A1L_rot3_in>=1 * robot_stop>=1))) * !(EX(!(((arm2_release_angle>=1 * A1L_in>=1) + ((A2U_ret_run>=1 * arm2_release_ext>=1) * arm2_backward>=1))))))] != FALSE
Checking (exact) 0 :((FwdU(Init,TRUE) * E(TRUE U (A1L_rot3_in>=1 * robot_stop>=1))) * !(EX(!(((arm2_release_angle>=1 * A1L_in>=1) + ((A2U_ret_run>=1 * arm2_release_ext>=1) * arm2_backward>=1))))))
Checking (exact) 1 :!(EX(!(((arm2_release_angle>=1 * A1L_in>=1) + ((A2U_ret_run>=1 * arm2_release_ext>=1) * arm2_backward>=1)))))
Checking (exact) 1 :EX(!(((arm2_release_angle>=1 * A1L_in>=1) + ((A2U_ret_run>=1 * arm2_release_ext>=1) * arm2_backward>=1))))
Checking (exact) 1 :(FwdU(Init,TRUE) * E(TRUE U (A1L_rot3_in>=1 * robot_stop>=1)))
Checking (exact) 1 :E(TRUE U (A1L_rot3_in>=1 * robot_stop>=1))
Checking (exact) 1 :FwdU(Init,TRUE)
Checking (exact) 1 :Init
(forward)formula 0,1,24.5272,536128,1,0,495,2.81073e+06,441,281,7160,1.64914e+06,602
FORMULA ParamProductionCell-PT-2-CTLFireability-0 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: (!(EX((CL_lower_run>=1 * crane_pick_up_height>=1))) * A(!(((A2L_ret_run>=1 * arm2_pick_up_ext>=1) * arm2_backward>=1)) U AG((A1L_rot2_run>=1 * arm1_pick_up_angle>=1))))
=> equivalent forward existential formula: ([(EY(Init) * (CL_lower_run>=1 * crane_pick_up_height>=1))] = FALSE * ([(FwdU((FwdU(Init,!(!(E(TRUE U !((A1L_rot2_run>=1 * arm1_pick_up_angle>=1)))))) * !(!(((A2L_ret_run>=1 * arm2_pick_up_ext>=1) * arm2_backward>=1)))),TRUE) * !((A1L_rot2_run>=1 * arm1_pick_up_angle>=1)))] = FALSE * [FwdG(Init,!(!(E(TRUE U !((A1L_rot2_run>=1 * arm1_pick_up_angle>=1))))))] = FALSE))
Checking (exact) 0 :([(EY(Init) * (CL_lower_run>=1 * crane_pick_up_height>=1))] = FALSE * ([(FwdU((FwdU(Init,!(!(E(TRUE U !((A1L_rot2_run>=1 * arm1_pick_up_angle>=1)))))) * !(!(((A2L_ret_run>=1 * arm2_pick_up_ext>=1) * arm2_backward>=1)))),TRUE) * !((A1L_rot2_run>=1 * arm1_pick_up_angle>=1)))] = FALSE * [FwdG(Init,!(!(E(TRUE U !((A1L_rot2_run>=1 * arm1_pick_up_angle>=1))))))] = FALSE))
Checking (exact) 1 :([(FwdU((FwdU(Init,!(!(E(TRUE U !((A1L_rot2_run>=1 * arm1_pick_up_angle>=1)))))) * !(!(((A2L_ret_run>=1 * arm2_pick_up_ext>=1) * arm2_backward>=1)))),TRUE) * !((A1L_rot2_run>=1 * arm1_pick_up_angle>=1)))] = FALSE * [FwdG(Init,!(!(E(TRUE U !((A1L_rot2_run>=1 * arm1_pick_up_angle>=1))))))] = FALSE)
Checking (exact) 1 :[FwdG(Init,!(!(E(TRUE U !((A1L_rot2_run>=1 * arm1_pick_up_angle>=1))))))] = FALSE
Checking (exact) 0 :FwdG(Init,!(!(E(TRUE U !((A1L_rot2_run>=1 * arm1_pick_up_angle>=1))))))
Checking (exact) 1 :Init
Checking (exact) 1 :!(!(E(TRUE U !((A1L_rot2_run>=1 * arm1_pick_up_angle>=1)))))
Checking (exact) 1 :E(TRUE U !((A1L_rot2_run>=1 * arm1_pick_up_angle>=1)))
(forward)formula 1,0,25.9203,550504,1,0,497,2.86996e+06,450,283,7583,1.74232e+06,612
FORMULA ParamProductionCell-PT-2-CTLFireability-1 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is FALSE !
***************************************
original formula: (AF(((((arm1_waiting_for_swivel_1>=1 * swivel>=1) * ((A1L_rot1_run>=1 * arm1_release_angle>=1) * robot_left>=1)) + (CU_lift_run>=1 * crane_transport_height>=1)) * EX(((A2U_rot1_run>=1 * arm1_pick_up_angle>=1) * robot_right>=1)))) * !((A1U_rot1_in>=1 * robot_stop>=1)))
=> equivalent forward existential formula: ([FwdG(Init,!(((((arm1_waiting_for_swivel_1>=1 * swivel>=1) * ((A1L_rot1_run>=1 * arm1_release_angle>=1) * robot_left>=1)) + (CU_lift_run>=1 * crane_transport_height>=1)) * EX(((A2U_rot1_run>=1 * arm1_pick_up_angle>=1) * robot_right>=1)))))] = FALSE * [(Init * (A1U_rot1_in>=1 * robot_stop>=1))] = FALSE)
Checking (exact) 0 :([FwdG(Init,!(((((arm1_waiting_for_swivel_1>=1 * swivel>=1) * ((A1L_rot1_run>=1 * arm1_release_angle>=1) * robot_left>=1)) + (CU_lift_run>=1 * crane_transport_height>=1)) * EX(((A2U_rot1_run>=1 * arm1_pick_up_angle>=1) * robot_right>=1)))))] = FALSE * [(Init * (A1U_rot1_in>=1 * robot_stop>=1))] = FALSE)
Checking (exact) 1 :[(Init * (A1U_rot1_in>=1 * robot_stop>=1))] = FALSE
Checking (exact) 0 :(Init * (A1U_rot1_in>=1 * robot_stop>=1))
Checking (exact) 1 :[FwdG(Init,!(((((arm1_waiting_for_swivel_1>=1 * swivel>=1) * ((A1L_rot1_run>=1 * arm1_release_angle>=1) * robot_left>=1)) + (CU_lift_run>=1 * crane_transport_height>=1)) * EX(((A2U_rot1_run>=1 * arm1_pick_up_angle>=1) * robot_right>=1)))))] = FALSE
Checking (exact) 0 :FwdG(Init,!(((((arm1_waiting_for_swivel_1>=1 * swivel>=1) * ((A1L_rot1_run>=1 * arm1_release_angle>=1) * robot_left>=1)) + (CU_lift_run>=1 * crane_transport_height>=1)) * EX(((A2U_rot1_run>=1 * arm1_pick_up_angle>=1) * robot_right>=1)))))
Checking (exact) 1 :Init
Checking (exact) 1 :!(((((arm1_waiting_for_swivel_1>=1 * swivel>=1) * ((A1L_rot1_run>=1 * arm1_release_angle>=1) * robot_left>=1)) + (CU_lift_run>=1 * crane_transport_height>=1)) * EX(((A2U_rot1_run>=1 * arm1_pick_up_angle>=1) * robot_right>=1))))
Checking (exact) 1 :((((arm1_waiting_for_swivel_1>=1 * swivel>=1) * ((A1L_rot1_run>=1 * arm1_release_angle>=1) * robot_left>=1)) + (CU_lift_run>=1 * crane_transport_height>=1)) * EX(((A2U_rot1_run>=1 * arm1_pick_up_angle>=1) * robot_right>=1)))
Checking (exact) 1 :EX(((A2U_rot1_run>=1 * arm1_pick_up_angle>=1) * robot_right>=1))
(forward)formula 2,0,26.0063,553140,1,0,502,2.87904e+06,477,286,7602,1.74924e+06,619
FORMULA ParamProductionCell-PT-2-CTLFireability-2 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is FALSE !
***************************************
original formula: (EG((!(((A2L_rot3_in>=1 * robot_stop>=1) + (A2L_rot1_run>=1 * arm2_pick_up_angle>=1))) + !(((PU_lower_run>=1 * press_at_lower_pos>=1) + (arm2_pick_up_angle>=1 * A2U_in>=1))))) * (!(AF((((A2U_rot1_run>=1 * arm1_pick_up_angle>=1) * robot_right>=1) * (belt1_stop>=1 * FB_at_end>=1)))) * EF((FB_out>=1 + !(((PL_lower_run>=1 * press_at_lower_pos>=1) * press_up>=1))))))
=> equivalent forward existential formula: [(FwdU(((Init * EG((!(((A2L_rot3_in>=1 * robot_stop>=1) + (A2L_rot1_run>=1 * arm2_pick_up_angle>=1))) + !(((PU_lower_run>=1 * press_at_lower_pos>=1) + (arm2_pick_up_angle>=1 * A2U_in>=1)))))) * !(!(EG(!((((A2U_rot1_run>=1 * arm1_pick_up_angle>=1) * robot_right>=1) * (belt1_stop>=1 * FB_at_end>=1))))))),TRUE) * (FB_out>=1 + !(((PL_lower_run>=1 * press_at_lower_pos>=1) * press_up>=1))))] != FALSE
Checking (exact) 0 :[(FwdU(((Init * EG((!(((A2L_rot3_in>=1 * robot_stop>=1) + (A2L_rot1_run>=1 * arm2_pick_up_angle>=1))) + !(((PU_lower_run>=1 * press_at_lower_pos>=1) + (arm2_pick_up_angle>=1 * A2U_in>=1)))))) * !(!(EG(!((((A2U_rot1_run>=1 * arm1_pick_up_angle>=1) * robot_right>=1) * (belt1_stop>=1 * FB_at_end>=1))))))),TRUE) * (FB_out>=1 + !(((PL_lower_run>=1 * press_at_lower_pos>=1) * press_up>=1))))] != FALSE
Checking (exact) 0 :(FwdU(((Init * EG((!(((A2L_rot3_in>=1 * robot_stop>=1) + (A2L_rot1_run>=1 * arm2_pick_up_angle>=1))) + !(((PU_lower_run>=1 * press_at_lower_pos>=1) + (arm2_pick_up_angle>=1 * A2U_in>=1)))))) * !(!(EG(!((((A2U_rot1_run>=1 * arm1_pick_up_angle>=1) * robot_right>=1) * (belt1_stop>=1 * FB_at_end>=1))))))),TRUE) * (FB_out>=1 + !(((PL_lower_run>=1 * press_at_lower_pos>=1) * press_up>=1))))
Checking (exact) 1 :(FB_out>=1 + !(((PL_lower_run>=1 * press_at_lower_pos>=1) * press_up>=1)))
Checking (exact) 1 :FwdU(((Init * EG((!(((A2L_rot3_in>=1 * robot_stop>=1) + (A2L_rot1_run>=1 * arm2_pick_up_angle>=1))) + !(((PU_lower_run>=1 * press_at_lower_pos>=1) + (arm2_pick_up_angle>=1 * A2U_in>=1)))))) * !(!(EG(!((((A2U_rot1_run>=1 * arm1_pick_up_angle>=1) * robot_right>=1) * (belt1_stop>=1 * FB_at_end>=1))))))),TRUE)
Checking (exact) 1 :((Init * EG((!(((A2L_rot3_in>=1 * robot_stop>=1) + (A2L_rot1_run>=1 * arm2_pick_up_angle>=1))) + !(((PU_lower_run>=1 * press_at_lower_pos>=1) + (arm2_pick_up_angle>=1 * A2U_in>=1)))))) * !(!(EG(!((((A2U_rot1_run>=1 * arm1_pick_up_angle>=1) * robot_right>=1) * (belt1_stop>=1 * FB_at_end>=1)))))))
Checking (exact) 1 :!(!(EG(!((((A2U_rot1_run>=1 * arm1_pick_up_angle>=1) * robot_right>=1) * (belt1_stop>=1 * FB_at_end>=1))))))
Checking (exact) 1 :EG(!((((A2U_rot1_run>=1 * arm1_pick_up_angle>=1) * robot_right>=1) * (belt1_stop>=1 * FB_at_end>=1))))
Checking (exact) 1 :(Init * EG((!(((A2L_rot3_in>=1 * robot_stop>=1) + (A2L_rot1_run>=1 * arm2_pick_up_angle>=1))) + !(((PU_lower_run>=1 * press_at_lower_pos>=1) + (arm2_pick_up_angle>=1 * A2U_in>=1))))))
Checking (exact) 1 :EG((!(((A2L_rot3_in>=1 * robot_stop>=1) + (A2L_rot1_run>=1 * arm2_pick_up_angle>=1))) + !(((PU_lower_run>=1 * press_at_lower_pos>=1) + (arm2_pick_up_angle>=1 * A2U_in>=1)))))
Checking (exact) 1 :Init
(forward)formula 3,1,26.0815,554932,1,0,505,2.88441e+06,513,288,7645,1.75479e+06,624
FORMULA ParamProductionCell-PT-2-CTLFireability-3 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: !(E(!(((press_ready_for_unloading>=1 * ch_PA2_free>=1) * (CU_trans_rs>=1 * crane_to_belt2>=1))) U (TL_rot_run>=1 * table_load_angle>=1)))
=> equivalent forward existential formula: [(FwdU(Init,!(((press_ready_for_unloading>=1 * ch_PA2_free>=1) * (CU_trans_rs>=1 * crane_to_belt2>=1)))) * (TL_rot_run>=1 * table_load_angle>=1))] = FALSE
Checking (exact) 0 :[(FwdU(Init,!(((press_ready_for_unloading>=1 * ch_PA2_free>=1) * (CU_trans_rs>=1 * crane_to_belt2>=1)))) * (TL_rot_run>=1 * table_load_angle>=1))] = FALSE
Checking (exact) 0 :(FwdU(Init,!(((press_ready_for_unloading>=1 * ch_PA2_free>=1) * (CU_trans_rs>=1 * crane_to_belt2>=1)))) * (TL_rot_run>=1 * table_load_angle>=1))
Checking (exact) 1 :(TL_rot_run>=1 * table_load_angle>=1)
Checking (exact) 1 :table_load_angle>=1
Checking (exact) 1 :FwdU(Init,!(((press_ready_for_unloading>=1 * ch_PA2_free>=1) * (CU_trans_rs>=1 * crane_to_belt2>=1))))
Checking (exact) 1 :Init
Hit Full ! (commute/partial/dont) 195/0/7
(forward)formula 4,0,26.3596,562040,1,0,510,2.89626e+06,534,290,7817,1.77233e+06,629
FORMULA ParamProductionCell-PT-2-CTLFireability-4 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is FALSE !
***************************************
original formula: EF(AX(EF((A1L_rot1_in>=1 * robot_stop>=1))))
=> equivalent forward existential formula: [(FwdU(Init,TRUE) * !(EX(!(E(TRUE U (A1L_rot1_in>=1 * robot_stop>=1))))))] != FALSE
Checking (exact) 0 :[(FwdU(Init,TRUE) * !(EX(!(E(TRUE U (A1L_rot1_in>=1 * robot_stop>=1))))))] != FALSE
Checking (exact) 0 :(FwdU(Init,TRUE) * !(EX(!(E(TRUE U (A1L_rot1_in>=1 * robot_stop>=1))))))
Checking (exact) 1 :!(EX(!(E(TRUE U (A1L_rot1_in>=1 * robot_stop>=1)))))
Checking (exact) 1 :EX(!(E(TRUE U (A1L_rot1_in>=1 * robot_stop>=1))))
Checking (exact) 1 :!(E(TRUE U (A1L_rot1_in>=1 * robot_stop>=1)))
Checking (exact) 1 :E(TRUE U (A1L_rot1_in>=1 * robot_stop>=1))
Checking (exact) 1 :FwdU(Init,TRUE)
Checking (exact) 1 :Init
(forward)formula 5,1,41.9898,842644,1,0,722,4.86291e+06,537,409,7818,2.89262e+06,930
FORMULA ParamProductionCell-PT-2-CTLFireability-5 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: !(E(((A1_extended>=1 * arm1_magnet_off>=1) + !((press_ready_for_loading>=1 * ch_A1P_full>=1))) U EX((arm2_waiting_for_swivel_2>=1 * swivel>=1))))
=> equivalent forward existential formula: [(EY(FwdU(Init,((A1_extended>=1 * arm1_magnet_off>=1) + !((press_ready_for_loading>=1 * ch_A1P_full>=1))))) * (arm2_waiting_for_swivel_2>=1 * swivel>=1))] = FALSE
Checking (exact) 0 :[(EY(FwdU(Init,((A1_extended>=1 * arm1_magnet_off>=1) + !((press_ready_for_loading>=1 * ch_A1P_full>=1))))) * (arm2_waiting_for_swivel_2>=1 * swivel>=1))] = FALSE
Checking (exact) 0 :(EY(FwdU(Init,((A1_extended>=1 * arm1_magnet_off>=1) + !((press_ready_for_loading>=1 * ch_A1P_full>=1))))) * (arm2_waiting_for_swivel_2>=1 * swivel>=1))
Checking (exact) 1 :(arm2_waiting_for_swivel_2>=1 * swivel>=1)
Checking (exact) 1 :swivel>=1
Checking (exact) 1 :EY(FwdU(Init,((A1_extended>=1 * arm1_magnet_off>=1) + !((press_ready_for_loading>=1 * ch_A1P_full>=1)))))
Checking (exact) 1 :FwdU(Init,((A1_extended>=1 * arm1_magnet_off>=1) + !((press_ready_for_loading>=1 * ch_A1P_full>=1))))
Checking (exact) 1 :Init
Hit Full ! (commute/partial/dont) 196/0/6
(forward)formula 6,1,42.1378,846336,1,0,727,4.87482e+06,556,411,8114,2.90551e+06,936
FORMULA ParamProductionCell-PT-2-CTLFireability-6 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: EF((A((crane_stop_v>=1 * CL_loaded>=1) U (A2U_rot2_in>=1 * robot_stop>=1)) * AF(((TU_lift_rs>=1 * table_upward>=1) * (arm2_pick_up_angle>=1 * A2U_in>=1)))))
=> equivalent forward existential formula: [((FwdU(Init,TRUE) * !((E(!((A2U_rot2_in>=1 * robot_stop>=1)) U (!((crane_stop_v>=1 * CL_loaded>=1)) * !((A2U_rot2_in>=1 * robot_stop>=1)))) + EG(!((A2U_rot2_in>=1 * robot_stop>=1)))))) * !(EG(!(((TU_lift_rs>=1 * table_upward>=1) * (arm2_pick_up_angle>=1 * A2U_in>=1))))))] != FALSE
Checking (exact) 0 :[((FwdU(Init,TRUE) * !((E(!((A2U_rot2_in>=1 * robot_stop>=1)) U (!((crane_stop_v>=1 * CL_loaded>=1)) * !((A2U_rot2_in>=1 * robot_stop>=1)))) + EG(!((A2U_rot2_in>=1 * robot_stop>=1)))))) * !(EG(!(((TU_lift_rs>=1 * table_upward>=1) * (arm2_pick_up_angle>=1 * A2U_in>=1))))))] != FALSE
Checking (exact) 0 :((FwdU(Init,TRUE) * !((E(!((A2U_rot2_in>=1 * robot_stop>=1)) U (!((crane_stop_v>=1 * CL_loaded>=1)) * !((A2U_rot2_in>=1 * robot_stop>=1)))) + EG(!((A2U_rot2_in>=1 * robot_stop>=1)))))) * !(EG(!(((TU_lift_rs>=1 * table_upward>=1) * (arm2_pick_up_angle>=1 * A2U_in>=1))))))
Checking (exact) 1 :!(EG(!(((TU_lift_rs>=1 * table_upward>=1) * (arm2_pick_up_angle>=1 * A2U_in>=1)))))
Checking (exact) 1 :EG(!(((TU_lift_rs>=1 * table_upward>=1) * (arm2_pick_up_angle>=1 * A2U_in>=1))))
Checking (exact) 1 :(FwdU(Init,TRUE) * !((E(!((A2U_rot2_in>=1 * robot_stop>=1)) U (!((crane_stop_v>=1 * CL_loaded>=1)) * !((A2U_rot2_in>=1 * robot_stop>=1)))) + EG(!((A2U_rot2_in>=1 * robot_stop>=1))))))
Checking (exact) 1 :!((E(!((A2U_rot2_in>=1 * robot_stop>=1)) U (!((crane_stop_v>=1 * CL_loaded>=1)) * !((A2U_rot2_in>=1 * robot_stop>=1)))) + EG(!((A2U_rot2_in>=1 * robot_stop>=1)))))
Checking (exact) 1 :(E(!((A2U_rot2_in>=1 * robot_stop>=1)) U (!((crane_stop_v>=1 * CL_loaded>=1)) * !((A2U_rot2_in>=1 * robot_stop>=1)))) + EG(!((A2U_rot2_in>=1 * robot_stop>=1))))
Checking (exact) 1 :E(!((A2U_rot2_in>=1 * robot_stop>=1)) U (!((crane_stop_v>=1 * CL_loaded>=1)) * !((A2U_rot2_in>=1 * robot_stop>=1))))
Checking (exact) 1 :EG(!((A2U_rot2_in>=1 * robot_stop>=1)))
Checking (exact) 1 :FwdU(Init,TRUE)
Checking (exact) 1 :Init
(forward)formula 7,0,43.5238,876532,1,0,937,5.10335e+06,582,502,8131,3.11245e+06,1204
FORMULA ParamProductionCell-PT-2-CTLFireability-7 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is FALSE !
***************************************
original formula: E((forge_run>=1 * press_at_upper_pos>=1) U !(AF(((A2U_rot1_run>=1 * arm1_pick_up_angle>=1) * robot_right>=1))))
=> equivalent forward existential formula: [FwdG(FwdU(Init,(forge_run>=1 * press_at_upper_pos>=1)),!(((A2U_rot1_run>=1 * arm1_pick_up_angle>=1) * robot_right>=1)))] != FALSE
Checking (exact) 0 :[FwdG(FwdU(Init,(forge_run>=1 * press_at_upper_pos>=1)),!(((A2U_rot1_run>=1 * arm1_pick_up_angle>=1) * robot_right>=1)))] != FALSE
Checking (exact) 0 :FwdG(FwdU(Init,(forge_run>=1 * press_at_upper_pos>=1)),!(((A2U_rot1_run>=1 * arm1_pick_up_angle>=1) * robot_right>=1)))
Checking (exact) 1 :FwdU(Init,(forge_run>=1 * press_at_upper_pos>=1))
Checking (exact) 1 :Init
Hit Full ! (commute/partial/dont) 198/2/4
Hit Full ! (commute/partial/dont) 179/0/23
(forward)formula 8,1,43.8149,883376,1,0,939,5.11748e+06,599,503,8387,3.12901e+06,1211
FORMULA ParamProductionCell-PT-2-CTLFireability-8 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: AF(((arm2_waiting_for_swivel_1>=1 * swivel>=1) + AF(((A2U_rot3_in>=1 * robot_stop>=1) + (A1U_rot3_in>=1 * robot_stop>=1)))))
=> equivalent forward existential formula: [FwdG(Init,!(((arm2_waiting_for_swivel_1>=1 * swivel>=1) + !(EG(!(((A2U_rot3_in>=1 * robot_stop>=1) + (A1U_rot3_in>=1 * robot_stop>=1))))))))] = FALSE
Checking (exact) 0 :[FwdG(Init,!(((arm2_waiting_for_swivel_1>=1 * swivel>=1) + !(EG(!(((A2U_rot3_in>=1 * robot_stop>=1) + (A1U_rot3_in>=1 * robot_stop>=1))))))))] = FALSE
Checking (exact) 0 :FwdG(Init,!(((arm2_waiting_for_swivel_1>=1 * swivel>=1) + !(EG(!(((A2U_rot3_in>=1 * robot_stop>=1) + (A1U_rot3_in>=1 * robot_stop>=1))))))))
Checking (exact) 1 :Init
Checking (exact) 1 :!(((arm2_waiting_for_swivel_1>=1 * swivel>=1) + !(EG(!(((A2U_rot3_in>=1 * robot_stop>=1) + (A1U_rot3_in>=1 * robot_stop>=1)))))))
Checking (exact) 1 :((arm2_waiting_for_swivel_1>=1 * swivel>=1) + !(EG(!(((A2U_rot3_in>=1 * robot_stop>=1) + (A1U_rot3_in>=1 * robot_stop>=1))))))
Checking (exact) 1 :!(EG(!(((A2U_rot3_in>=1 * robot_stop>=1) + (A1U_rot3_in>=1 * robot_stop>=1)))))
Checking (exact) 1 :EG(!(((A2U_rot3_in>=1 * robot_stop>=1) + (A1U_rot3_in>=1 * robot_stop>=1))))
(forward)formula 9,1,58.9183,1149744,1,0,1846,6.7314e+06,617,1023,8397,4.63508e+06,2139
FORMULA ParamProductionCell-PT-2-CTLFireability-9 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: (AG(EG(((A1L_ext_run>=1 * arm1_pick_up_ext>=1) * (A1U_ret_rs>=1 * arm1_backward>=1)))) + AF(AF(((TU_lift_rs>=1 * table_upward>=1) * (A1L_rot2_rs>=1 * robot_left>=1)))))
=> equivalent forward existential formula: [FwdG((Init * !(!(E(TRUE U !(EG(((A1L_ext_run>=1 * arm1_pick_up_ext>=1) * (A1U_ret_rs>=1 * arm1_backward>=1)))))))),!(!(EG(!(((TU_lift_rs>=1 * table_upward>=1) * (A1L_rot2_rs>=1 * robot_left>=1)))))))] = FALSE
Checking (exact) 0 :[FwdG((Init * !(!(E(TRUE U !(EG(((A1L_ext_run>=1 * arm1_pick_up_ext>=1) * (A1U_ret_rs>=1 * arm1_backward>=1)))))))),!(!(EG(!(((TU_lift_rs>=1 * table_upward>=1) * (A1L_rot2_rs>=1 * robot_left>=1)))))))] = FALSE
Checking (exact) 0 :FwdG((Init * !(!(E(TRUE U !(EG(((A1L_ext_run>=1 * arm1_pick_up_ext>=1) * (A1U_ret_rs>=1 * arm1_backward>=1)))))))),!(!(EG(!(((TU_lift_rs>=1 * table_upward>=1) * (A1L_rot2_rs>=1 * robot_left>=1)))))))
Checking (exact) 1 :(Init * !(!(E(TRUE U !(EG(((A1L_ext_run>=1 * arm1_pick_up_ext>=1) * (A1U_ret_rs>=1 * arm1_backward>=1))))))))
Checking (exact) 1 :!(!(E(TRUE U !(EG(((A1L_ext_run>=1 * arm1_pick_up_ext>=1) * (A1U_ret_rs>=1 * arm1_backward>=1)))))))
Checking (exact) 1 :E(TRUE U !(EG(((A1L_ext_run>=1 * arm1_pick_up_ext>=1) * (A1U_ret_rs>=1 * arm1_backward>=1)))))
Checking (exact) 1 :!(EG(((A1L_ext_run>=1 * arm1_pick_up_ext>=1) * (A1U_ret_rs>=1 * arm1_backward>=1))))
Checking (exact) 1 :EG(((A1L_ext_run>=1 * arm1_pick_up_ext>=1) * (A1U_ret_rs>=1 * arm1_backward>=1)))
Fast SCC detection found none.
Checking (exact) 1 :Init
Checking (exact) 1 :!(!(EG(!(((TU_lift_rs>=1 * table_upward>=1) * (A1L_rot2_rs>=1 * robot_left>=1))))))
Checking (exact) 1 :EG(!(((TU_lift_rs>=1 * table_upward>=1) * (A1L_rot2_rs>=1 * robot_left>=1))))
(forward)formula 10,0,58.9535,1150960,1,0,1846,6.73183e+06,637,1023,8412,4.63558e+06,2142
FORMULA ParamProductionCell-PT-2-CTLFireability-10 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is FALSE !
***************************************
original formula: EG(AF((arm2_storing>=1 * ch_A2D_free>=1)))
=> equivalent forward existential formula: [FwdG(Init,!(EG(!((arm2_storing>=1 * ch_A2D_free>=1)))))] != FALSE
Checking (exact) 0 :[FwdG(Init,!(EG(!((arm2_storing>=1 * ch_A2D_free>=1)))))] != FALSE
Checking (exact) 0 :FwdG(Init,!(EG(!((arm2_storing>=1 * ch_A2D_free>=1)))))
Checking (exact) 1 :Init
Checking (exact) 1 :!(EG(!((arm2_storing>=1 * ch_A2D_free>=1))))
Checking (exact) 1 :EG(!((arm2_storing>=1 * ch_A2D_free>=1)))
Fast SCC detection found none.
(forward)formula 11,1,140.448,2203412,1,0,3142,1.43772e+07,17,1541,4419,1.00017e+07,170
FORMULA ParamProductionCell-PT-2-CTLFireability-11 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: A(((!((A2L_rot1_run>=1 * arm2_pick_up_angle>=1)) + (((A2U_rot1_run>=1 * arm1_pick_up_angle>=1) * robot_right>=1) + (TL_rot_rs>=1 * table_right>=1))) + (!(((PL_lower_run>=1 * press_at_lower_pos>=1) * press_up>=1)) * !((DB_trans_run>=1 * belt2_light_barrier_true>=1)))) U E((A2U_ret_rs>=1 * arm2_backward>=1) U ((forge_run>=1 * press_at_middle_pos>=1) * press_upward>=1)))
=> equivalent forward existential formula: [((Init * !(EG(!(E((A2U_ret_rs>=1 * arm2_backward>=1) U ((forge_run>=1 * press_at_middle_pos>=1) * press_upward>=1)))))) * !(E(!(E((A2U_ret_rs>=1 * arm2_backward>=1) U ((forge_run>=1 * press_at_middle_pos>=1) * press_upward>=1))) U (!(((!((A2L_rot1_run>=1 * arm2_pick_up_angle>=1)) + (((A2U_rot1_run>=1 * arm1_pick_up_angle>=1) * robot_right>=1) + (TL_rot_rs>=1 * table_right>=1))) + (!(((PL_lower_run>=1 * press_at_lower_pos>=1) * press_up>=1)) * !((DB_trans_run>=1 * belt2_light_barrier_true>=1))))) * !(E((A2U_ret_rs>=1 * arm2_backward>=1) U ((forge_run>=1 * press_at_middle_pos>=1) * press_upward>=1)))))))] != FALSE
Checking (exact) 0 :[((Init * !(EG(!(E((A2U_ret_rs>=1 * arm2_backward>=1) U ((forge_run>=1 * press_at_middle_pos>=1) * press_upward>=1)))))) * !(E(!(E((A2U_ret_rs>=1 * arm2_backward>=1) U ((forge_run>=1 * press_at_middle_pos>=1) * press_upward>=1))) U (!(((!((A2L_rot1_run>=1 * arm2_pick_up_angle>=1)) + (((A2U_rot1_run>=1 * arm1_pick_up_angle>=1) * robot_right>=1) + (TL_rot_rs>=1 * table_right>=1))) + (!(((PL_lower_run>=1 * press_at_lower_pos>=1) * press_up>=1)) * !((DB_trans_run>=1 * belt2_light_barrier_true>=1))))) * !(E((A2U_ret_rs>=1 * arm2_backward>=1) U ((forge_run>=1 * press_at_middle_pos>=1) * press_upward>=1)))))))] != FALSE
Checking (exact) 0 :((Init * !(EG(!(E((A2U_ret_rs>=1 * arm2_backward>=1) U ((forge_run>=1 * press_at_middle_pos>=1) * press_upward>=1)))))) * !(E(!(E((A2U_ret_rs>=1 * arm2_backward>=1) U ((forge_run>=1 * press_at_middle_pos>=1) * press_upward>=1))) U (!(((!((A2L_rot1_run>=1 * arm2_pick_up_angle>=1)) + (((A2U_rot1_run>=1 * arm1_pick_up_angle>=1) * robot_right>=1) + (TL_rot_rs>=1 * table_right>=1))) + (!(((PL_lower_run>=1 * press_at_lower_pos>=1) * press_up>=1)) * !((DB_trans_run>=1 * belt2_light_barrier_true>=1))))) * !(E((A2U_ret_rs>=1 * arm2_backward>=1) U ((forge_run>=1 * press_at_middle_pos>=1) * press_upward>=1)))))))
Checking (exact) 1 :!(E(!(E((A2U_ret_rs>=1 * arm2_backward>=1) U ((forge_run>=1 * press_at_middle_pos>=1) * press_upward>=1))) U (!(((!((A2L_rot1_run>=1 * arm2_pick_up_angle>=1)) + (((A2U_rot1_run>=1 * arm1_pick_up_angle>=1) * robot_right>=1) + (TL_rot_rs>=1 * table_right>=1))) + (!(((PL_lower_run>=1 * press_at_lower_pos>=1) * press_up>=1)) * !((DB_trans_run>=1 * belt2_light_barrier_true>=1))))) * !(E((A2U_ret_rs>=1 * arm2_backward>=1) U ((forge_run>=1 * press_at_middle_pos>=1) * press_upward>=1))))))
Checking (exact) 1 :E(!(E((A2U_ret_rs>=1 * arm2_backward>=1) U ((forge_run>=1 * press_at_middle_pos>=1) * press_upward>=1))) U (!(((!((A2L_rot1_run>=1 * arm2_pick_up_angle>=1)) + (((A2U_rot1_run>=1 * arm1_pick_up_angle>=1) * robot_right>=1) + (TL_rot_rs>=1 * table_right>=1))) + (!(((PL_lower_run>=1 * press_at_lower_pos>=1) * press_up>=1)) * !((DB_trans_run>=1 * belt2_light_barrier_true>=1))))) * !(E((A2U_ret_rs>=1 * arm2_backward>=1) U ((forge_run>=1 * press_at_middle_pos>=1) * press_upward>=1)))))
Checking (exact) 1 :!(E((A2U_ret_rs>=1 * arm2_backward>=1) U ((forge_run>=1 * press_at_middle_pos>=1) * press_upward>=1)))
Checking (exact) 1 :E((A2U_ret_rs>=1 * arm2_backward>=1) U ((forge_run>=1 * press_at_middle_pos>=1) * press_upward>=1))
Checking (exact) 1 :(!(((!((A2L_rot1_run>=1 * arm2_pick_up_angle>=1)) + (((A2U_rot1_run>=1 * arm1_pick_up_angle>=1) * robot_right>=1) + (TL_rot_rs>=1 * table_right>=1))) + (!(((PL_lower_run>=1 * press_at_lower_pos>=1) * press_up>=1)) * !((DB_trans_run>=1 * belt2_light_barrier_true>=1))))) * !(E((A2U_ret_rs>=1 * arm2_backward>=1) U ((forge_run>=1 * press_at_middle_pos>=1) * press_upward>=1))))
Checking (exact) 1 :!(E((A2U_ret_rs>=1 * arm2_backward>=1) U ((forge_run>=1 * press_at_middle_pos>=1) * press_upward>=1)))
Checking (exact) 1 :E((A2U_ret_rs>=1 * arm2_backward>=1) U ((forge_run>=1 * press_at_middle_pos>=1) * press_upward>=1))
Checking (exact) 1 :(Init * !(EG(!(E((A2U_ret_rs>=1 * arm2_backward>=1) U ((forge_run>=1 * press_at_middle_pos>=1) * press_upward>=1))))))
Checking (exact) 1 :!(EG(!(E((A2U_ret_rs>=1 * arm2_backward>=1) U ((forge_run>=1 * press_at_middle_pos>=1) * press_upward>=1)))))
Checking (exact) 1 :EG(!(E((A2U_ret_rs>=1 * arm2_backward>=1) U ((forge_run>=1 * press_at_middle_pos>=1) * press_upward>=1))))
Checking (exact) 1 :!(E((A2U_ret_rs>=1 * arm2_backward>=1) U ((forge_run>=1 * press_at_middle_pos>=1) * press_upward>=1)))
Checking (exact) 1 :E((A2U_ret_rs>=1 * arm2_backward>=1) U ((forge_run>=1 * press_at_middle_pos>=1) * press_upward>=1))
Fast SCC detection found none.
Checking (exact) 1 :Init
(forward)formula 12,1,157.368,2203416,1,0,3142,1.43772e+07,71,1541,4468,1.00017e+07,1613
FORMULA ParamProductionCell-PT-2-CTLFireability-12 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: E(EF(!((arm2_magnet_off>=1 * A2L_extended>=1))) U (PU_in>=1 * press_stop>=1))
=> equivalent forward existential formula: [(FwdU(Init,E(TRUE U !((arm2_magnet_off>=1 * A2L_extended>=1)))) * (PU_in>=1 * press_stop>=1))] != FALSE
Checking (exact) 0 :[(FwdU(Init,E(TRUE U !((arm2_magnet_off>=1 * A2L_extended>=1)))) * (PU_in>=1 * press_stop>=1))] != FALSE
Checking (exact) 0 :(FwdU(Init,E(TRUE U !((arm2_magnet_off>=1 * A2L_extended>=1)))) * (PU_in>=1 * press_stop>=1))
Checking (exact) 1 :(PU_in>=1 * press_stop>=1)
Checking (exact) 1 :press_stop>=1
Checking (exact) 1 :FwdU(Init,E(TRUE U !((arm2_magnet_off>=1 * A2L_extended>=1))))
Checking (exact) 1 :Init
Checking (exact) 1 :E(TRUE U !((arm2_magnet_off>=1 * A2L_extended>=1)))
(forward)formula 13,1,157.668,2203416,1,0,3142,1.43772e+07,85,1541,4697,1.00017e+07,1621
FORMULA ParamProductionCell-PT-2-CTLFireability-13 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: EG(AG(AF(((CL_trans_run>=1 * crane_to_belt1>=1) * crane_above_deposit_belt>=1))))
=> equivalent forward existential formula: [FwdG(Init,!(E(TRUE U !(!(EG(!(((CL_trans_run>=1 * crane_to_belt1>=1) * crane_above_deposit_belt>=1))))))))] != FALSE
Checking (exact) 0 :[FwdG(Init,!(E(TRUE U !(!(EG(!(((CL_trans_run>=1 * crane_to_belt1>=1) * crane_above_deposit_belt>=1))))))))] != FALSE
Checking (exact) 0 :FwdG(Init,!(E(TRUE U !(!(EG(!(((CL_trans_run>=1 * crane_to_belt1>=1) * crane_above_deposit_belt>=1))))))))
Checking (exact) 1 :Init
Checking (exact) 1 :!(E(TRUE U !(!(EG(!(((CL_trans_run>=1 * crane_to_belt1>=1) * crane_above_deposit_belt>=1)))))))
Checking (exact) 1 :E(TRUE U !(!(EG(!(((CL_trans_run>=1 * crane_to_belt1>=1) * crane_above_deposit_belt>=1))))))
Checking (exact) 1 :!(!(EG(!(((CL_trans_run>=1 * crane_to_belt1>=1) * crane_above_deposit_belt>=1)))))
Checking (exact) 1 :EG(!(((CL_trans_run>=1 * crane_to_belt1>=1) * crane_above_deposit_belt>=1)))
Fast SCC detection found none.
(forward)formula 14,1,177.859,2203416,1,0,3142,1.43772e+07,97,1541,4706,1.00017e+07,3423
FORMULA ParamProductionCell-PT-2-CTLFireability-14 TRUE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is TRUE !
***************************************
original formula: E(AF((arm2_pick_up_angle>=1 * A1U_in>=1)) U AX(((A2U_rot2_run>=1 * arm1_release_angle>=1) * robot_left>=1)))
=> equivalent forward existential formula: [(FwdU(Init,!(EG(!((arm2_pick_up_angle>=1 * A1U_in>=1))))) * !(EX(!(((A2U_rot2_run>=1 * arm1_release_angle>=1) * robot_left>=1)))))] != FALSE
Checking (exact) 0 :[(FwdU(Init,!(EG(!((arm2_pick_up_angle>=1 * A1U_in>=1))))) * !(EX(!(((A2U_rot2_run>=1 * arm1_release_angle>=1) * robot_left>=1)))))] != FALSE
Checking (exact) 0 :(FwdU(Init,!(EG(!((arm2_pick_up_angle>=1 * A1U_in>=1))))) * !(EX(!(((A2U_rot2_run>=1 * arm1_release_angle>=1) * robot_left>=1)))))
Checking (exact) 1 :!(EX(!(((A2U_rot2_run>=1 * arm1_release_angle>=1) * robot_left>=1))))
Checking (exact) 1 :EX(!(((A2U_rot2_run>=1 * arm1_release_angle>=1) * robot_left>=1)))
Checking (exact) 1 :FwdU(Init,!(EG(!((arm2_pick_up_angle>=1 * A1U_in>=1)))))
Checking (exact) 1 :Init
Checking (exact) 1 :!(EG(!((arm2_pick_up_angle>=1 * A1U_in>=1))))
Checking (exact) 1 :EG(!((arm2_pick_up_angle>=1 * A1U_in>=1)))
(forward)formula 15,0,177.974,2203416,1,0,3142,1.43772e+07,117,1541,4719,1.00017e+07,3438
FORMULA ParamProductionCell-PT-2-CTLFireability-15 FALSE TECHNIQUES DECISION_DIAGRAMS TOPOLOGICAL
Formula is FALSE !
***************************************
BK_STOP 1463986270098
--------------------
content from stderr:
+ export BINDIR=/home/mcc/BenchKit/
+ BINDIR=/home/mcc/BenchKit/
++ pwd
+ export MODEL=/home/mcc/execution
+ MODEL=/home/mcc/execution
+ [[ CTLFireability = StateSpace ]]
+ /home/mcc/BenchKit//runeclipse.sh /home/mcc/execution CTLFireability -its
+ ulimit -s 65536
+ java -Dosgi.requiredJavaVersion=1.6 -XX:MaxPermSize=512m -Xss8m -Xms40m -Xmx8192m -Declipse.pde.launch=true -Dfile.encoding=UTF-8 -classpath /home/mcc/BenchKit//eclipse/plugins/org.eclipse.equinox.launcher_1.3.100.v20150511-1540.jar org.eclipse.equinox.launcher.Main -application fr.lip6.move.gal.application.pnmcc -data /home/mcc/BenchKit//workspace -os linux -ws gtk -arch x86_64 -nl en_US -consoleLog -pnfolder /home/mcc/execution -examination CTLFireability -z3path /home/mcc/BenchKit//z3/bin/z3 -yices2path /home/mcc/BenchKit//yices/bin/yices -its
Java HotSpot(TM) 64-Bit Server VM warning: ignoring option MaxPermSize=512m; support was removed in 8.0
May 23, 2016 6:48:10 AM fr.lip6.move.gal.application.Application transformPNML
INFO: Parsing pnml file : /home/mcc/execution/model.pnml
May 23, 2016 6:48:10 AM fr.lip6.move.gal.nupn.PTNetReader loadFromXML
INFO: Load time of PNML (sax parser for PT used): 115 ms
May 23, 2016 6:48:10 AM fr.lip6.move.gal.pnml.togal.PTGALTransformer handlePage
INFO: Transformed 231 places.
May 23, 2016 6:48:10 AM fr.lip6.move.gal.pnml.togal.PTGALTransformer handlePage
INFO: Transformed 202 transitions.
May 23, 2016 6:48:11 AM fr.lip6.move.gal.instantiate.GALRewriter flatten
INFO: Flatten gal took : 159 ms
May 23, 2016 6:48:11 AM fr.lip6.move.serialization.SerializationUtil systemToFile
INFO: Time to serialize gal into /home/mcc/execution/CTLFireability.gal : 217 ms
May 23, 2016 6:48:11 AM fr.lip6.move.serialization.SerializationUtil serializePropertiesForITSCTLTools
INFO: Time to serialize properties into /home/mcc/execution/CTLFireability.ctl : 2 ms
Sequence of Actions to be Executed by the VM
This is useful if one wants to reexecute the tool in the VM from the submitted image disk.
set -x
# this is for BenchKit: configuration of major elements for the test
export BK_INPUT="ParamProductionCell-PT-2"
export BK_EXAMINATION="CTLFireability"
export BK_TOOL="itstools"
export BK_RESULT_DIR="/root/BK_RESULTS/OUTPUTS"
export BK_TIME_CONFINEMENT="3600"
export BK_MEMORY_CONFINEMENT="16384"
# this is specific to your benchmark or test
export BIN_DIR="$HOME/BenchKit/bin"
# remove the execution directoty if it exists (to avoid increse of .vmdk images)
if [ -d execution ] ; then
rm -rf execution
fi
tar xzf /home/mcc/BenchKit/INPUTS/ParamProductionCell-PT-2.tgz
mv ParamProductionCell-PT-2 execution
# this is for BenchKit: explicit launching of the test
cd execution
echo "====================================================================="
echo " Generated by BenchKit 2-2979"
echo " Executing tool itstools"
echo " Input is ParamProductionCell-PT-2, examination is CTLFireability"
echo " Time confinement is $BK_TIME_CONFINEMENT seconds"
echo " Memory confinement is 16384 MBytes"
echo " Number of cores is 4"
echo " Run identifier is r073kn-smll-146363809000157"
echo "====================================================================="
echo
echo "--------------------"
echo "content from stdout:"
echo
echo "=== Data for post analysis generated by BenchKit (invocation template)"
echo
if [ "CTLFireability" = "UpperBounds" ] ; then
echo "The expected result is a vector of positive values"
echo NUM_VECTOR
elif [ "CTLFireability" != "StateSpace" ] ; then
echo "The expected result is a vector of booleans"
echo BOOL_VECTOR
else
echo "no data necessary for post analysis"
fi
echo
if [ -f "CTLFireability.txt" ] ; then
echo "here is the order used to build the result vector(from text file)"
for x in $(grep Property CTLFireability.txt | cut -d ' ' -f 2 | sort -u) ; do
echo "FORMULA_NAME $x"
done
elif [ -f "CTLFireability.xml" ] ; then # for cunf (txt files deleted;-)
echo echo "here is the order used to build the result vector(from xml file)"
for x in $(grep '
echo "FORMULA_NAME $x"
done
fi
echo
echo "=== Now, execution of the tool begins"
echo
echo -n "BK_START "
date -u +%s%3N
echo
timeout -s 9 $BK_TIME_CONFINEMENT bash -c "/home/mcc/BenchKit/BenchKit_head.sh 2> STDERR ; echo ; echo -n \"BK_STOP \" ; date -u +%s%3N"
if [ $? -eq 137 ] ; then
echo
echo "BK_TIME_CONFINEMENT_REACHED"
fi
echo
echo "--------------------"
echo "content from stderr:"
echo
cat STDERR ;