

About the Execution of Marcie for S_ParamProductionCell-PT-5
| Execution Summary | |||||
| Max Memory Used (MB) |
Time wait (ms) | CPU Usage (ms) | I/O Wait (ms) | Computed Result | Execution Status |
| 4059.140 | 20074.00 | 20019.00 | 20.40 | TTTTTTTTTTTTTTTT | normal |
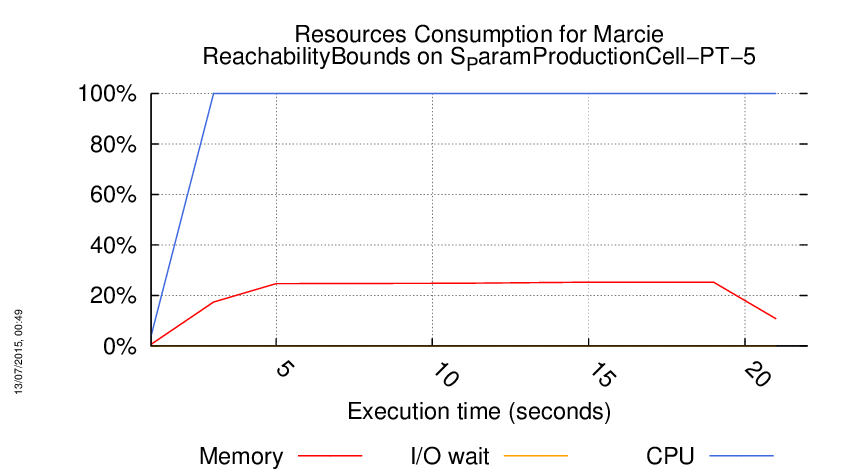
Execution Chart
We display below the execution chart for this examination (boot time has been removed).
Trace from the execution
Waiting for the VM to be ready (probing ssh)
.........
=====================================================================
Generated by BenchKit 2-2270
Executing tool marcie
Input is S_ParamProductionCell-PT-5, examination is ReachabilityBounds
Time confinement is 3600 seconds
Memory confinement is 16384 MBytes
Number of cores is 1
Run identifier is r204st-blw3-143341204500073
=====================================================================
--------------------
content from stdout:
=== Data for post analysis generated by BenchKit (invocation template)
The expected result is a vector of booleans
BOOL_VECTOR
here is the order used to build the result vector(from text file)
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityBounds-0
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityBounds-1
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityBounds-10
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityBounds-11
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityBounds-12
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityBounds-13
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityBounds-14
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityBounds-15
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityBounds-2
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityBounds-3
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityBounds-4
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityBounds-5
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityBounds-6
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityBounds-7
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityBounds-8
FORMULA_NAME ParamProductionCell-PT-5-ReachabilityBounds-9
=== Now, execution of the tool begins
BK_START 1433630842538
Model: S_ParamProductionCell-PT-5
reachability algorithm:
Saturation-based algorithm
variable ordering algorithm:
Calculated like in [Noa99]
--memory=6 --suppress --rs-algorithm=3 --place-order=5
Marcie rev. 1429:1432M (built: crohr on 2014-10-22)
A model checker for Generalized Stochastic Petri nets
authors: Alex Tovchigrechko (IDD package and CTL model checking)
Martin Schwarick (Symbolic numerical analysis and CSL model checking)
Christian Rohr (Simulative and approximative numerical model checking)
marcie@informatik.tu-cottbus.de
called as: marcie --net-file=model.pnml --mcc-file=ReachabilityBounds.xml --memory=6 --suppress --rs-algorithm=3 --place-order=5
parse successfull
net created successfully
(NrP: 231 NrTr: 202 NrArc: 846)
net check time: 0m0sec
parse formulas successfull
formulas created successfully
place and transition orderings generation:0m0sec
init dd package: 0m3sec
RS generation: 0m6sec
-> reachability set: #nodes 75901 (7.6e+04) #states 1,657,242 (6)
starting MCC model checker
--------------------------
checking: maxVal(A2U_extended)<=1
normalized: maxVal(A2U_extended)<=1
abstracting: (1<=1) states: 1,657,242 (6)
-> the formula is TRUE
FORMULA ParamProductionCell-PT-5-ReachabilityBounds-0 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m0sec
checking: [maxVal(swivel)<=2 & [[maxVal(swivel)<=3 & [maxVal(A1U_rot2_rs)<=2 & [maxVal(table_ready_for_unloading)<=2 & [maxVal(PL_in)<=3 & maxVal(A1U_rot2_in)<=3]]]] & maxVal(arm2_retract_ext)<=1]]
normalized: [maxVal(swivel)<=2 & [maxVal(arm2_retract_ext)<=1 & [maxVal(swivel)<=3 & [maxVal(A1U_rot2_rs)<=2 & [maxVal(table_ready_for_unloading)<=2 & [maxVal(PL_in)<=3 & maxVal(A1U_rot2_in)<=3]]]]]]
abstracting: (1<=3) states: 1,657,242 (6)
abstracting: (1<=3) states: 1,657,242 (6)
abstracting: (1<=2) states: 1,657,242 (6)
abstracting: (1<=2) states: 1,657,242 (6)
abstracting: (1<=3) states: 1,657,242 (6)
abstracting: (1<=1) states: 1,657,242 (6)
abstracting: (1<=2) states: 1,657,242 (6)
-> the formula is TRUE
FORMULA ParamProductionCell-PT-5-ReachabilityBounds-1 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m0sec
checking: maxVal(belt2_stop)<=2
normalized: maxVal(belt2_stop)<=2
abstracting: (1<=2) states: 1,657,242 (6)
-> the formula is TRUE
FORMULA ParamProductionCell-PT-5-ReachabilityBounds-2 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m0sec
checking: [maxVal(forge_rs)<=1 & [maxVal(DB_deliver_run)<=1 & maxVal(A2U_out)<=3]]
normalized: [maxVal(forge_rs)<=1 & [maxVal(DB_deliver_run)<=1 & maxVal(A2U_out)<=3]]
abstracting: (1<=3) states: 1,657,242 (6)
abstracting: (1<=1) states: 1,657,242 (6)
abstracting: (1<=1) states: 1,657,242 (6)
-> the formula is TRUE
FORMULA ParamProductionCell-PT-5-ReachabilityBounds-3 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m0sec
checking: maxVal(TU_lift_run)<=2
normalized: maxVal(TU_lift_run)<=2
abstracting: (1<=2) states: 1,657,242 (6)
-> the formula is TRUE
FORMULA ParamProductionCell-PT-5-ReachabilityBounds-4 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m0sec
checking: [maxVal(swivel)<=2 & maxVal(arm2_store_free)<=1]
normalized: [maxVal(swivel)<=2 & maxVal(arm2_store_free)<=1]
abstracting: (1<=1) states: 1,657,242 (6)
abstracting: (1<=2) states: 1,657,242 (6)
-> the formula is TRUE
FORMULA ParamProductionCell-PT-5-ReachabilityBounds-5 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m0sec
checking: maxVal(A2L_loaded)<=2
normalized: maxVal(A2L_loaded)<=2
abstracting: (1<=2) states: 1,657,242 (6)
-> the formula is TRUE
FORMULA ParamProductionCell-PT-5-ReachabilityBounds-6 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m0sec
checking: [[maxVal(A2L_rot3_in)<=1 & maxVal(A2U_rot3_run)<=2] & [[[[maxVal(ch_FT_full)<=3 & maxVal(A2L_ext_run)<=3] & [maxVal(DB_out)<=2 & [maxVal(crane_mag_on)<=1 & maxVal(arm1_release_ext)<=1]]] & [[[maxVal(A2U_out)<=3 & maxVal(feed_belt_idle)<=2] & [maxVal(DB_deliver_run)<=2 & maxVal(A2U_rot3_rs)<=3]] & [maxVal(blank_forged)<=3 & [maxVal(TU_rot_rs)<=1 & maxVal(crane_transport_height)<=2]]]] & [[[[maxVal(belt1_light_barrier_false)<=2 & maxVal(crane_stop_v)<=2] & maxVal(ch_A2D_full)<=1] & maxVal(A1U_rot1_in)<=1] & [maxVal(PU_lower_run)<=1 & [[maxVal(ch_A1P_full)<=3 & maxVal(A2L_rotated)<=1] & [maxVal(DB_at_end)<=1 & maxVal(A1L_rot2_rs)<=1]]]]]]
normalized: [[maxVal(A2L_rot3_in)<=1 & maxVal(A2U_rot3_run)<=2] & [[[[maxVal(blank_forged)<=3 & [maxVal(TU_rot_rs)<=1 & maxVal(crane_transport_height)<=2]] & [[maxVal(DB_deliver_run)<=2 & maxVal(A2U_rot3_rs)<=3] & [maxVal(A2U_out)<=3 & maxVal(feed_belt_idle)<=2]]] & [[maxVal(ch_FT_full)<=3 & maxVal(A2L_ext_run)<=3] & [maxVal(DB_out)<=2 & [maxVal(crane_mag_on)<=1 & maxVal(arm1_release_ext)<=1]]]] & [[maxVal(PU_lower_run)<=1 & [[maxVal(DB_at_end)<=1 & maxVal(A1L_rot2_rs)<=1] & [maxVal(ch_A1P_full)<=3 & maxVal(A2L_rotated)<=1]]] & [maxVal(A1U_rot1_in)<=1 & [maxVal(ch_A2D_full)<=1 & [maxVal(belt1_light_barrier_false)<=2 & maxVal(crane_stop_v)<=2]]]]]]
abstracting: (1<=2) states: 1,657,242 (6)
abstracting: (1<=2) states: 1,657,242 (6)
abstracting: (1<=1) states: 1,657,242 (6)
abstracting: (1<=1) states: 1,657,242 (6)
abstracting: (1<=1) states: 1,657,242 (6)
abstracting: (1<=3) states: 1,657,242 (6)
abstracting: (1<=1) states: 1,657,242 (6)
abstracting: (1<=1) states: 1,657,242 (6)
abstracting: (1<=1) states: 1,657,242 (6)
abstracting: (1<=1) states: 1,657,242 (6)
abstracting: (1<=1) states: 1,657,242 (6)
abstracting: (1<=2) states: 1,657,242 (6)
abstracting: (1<=3) states: 1,657,242 (6)
abstracting: (1<=3) states: 1,657,242 (6)
abstracting: (1<=2) states: 1,657,242 (6)
abstracting: (1<=3) states: 1,657,242 (6)
abstracting: (1<=3) states: 1,657,242 (6)
abstracting: (1<=2) states: 1,657,242 (6)
abstracting: (1<=2) states: 1,657,242 (6)
abstracting: (1<=1) states: 1,657,242 (6)
abstracting: (1<=3) states: 1,657,242 (6)
abstracting: (1<=2) states: 1,657,242 (6)
abstracting: (1<=1) states: 1,657,242 (6)
-> the formula is TRUE
FORMULA ParamProductionCell-PT-5-ReachabilityBounds-7 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m0sec
checking: [maxVal(crane_store_free)<=2 & [[maxVal(arm2_pick_up_angle)<=1 & maxVal(press_ready_for_unloading)<=2] & [[maxVal(ch_A2D_full)<=2 & [maxVal(ch_CF_full)<=1 & maxVal(A2U_rot1_run)<=3]] & maxVal(FB_in)<=2]]]
normalized: [maxVal(crane_store_free)<=2 & [[maxVal(arm2_pick_up_angle)<=1 & maxVal(press_ready_for_unloading)<=2] & [maxVal(FB_in)<=2 & [maxVal(ch_A2D_full)<=2 & [maxVal(ch_CF_full)<=1 & maxVal(A2U_rot1_run)<=3]]]]]
abstracting: (1<=3) states: 1,657,242 (6)
abstracting: (1<=1) states: 1,657,242 (6)
abstracting: (1<=2) states: 1,657,242 (6)
abstracting: (1<=2) states: 1,657,242 (6)
abstracting: (1<=2) states: 1,657,242 (6)
abstracting: (1<=1) states: 1,657,242 (6)
abstracting: (1<=2) states: 1,657,242 (6)
-> the formula is TRUE
FORMULA ParamProductionCell-PT-5-ReachabilityBounds-8 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m0sec
checking: [maxVal(CU_unloaded)<=2 & [[maxVal(A2U_rot3_rs)<=1 & [[[maxVal(TU_rot_run)<=3 & maxVal(crane_above_feed_belt)<=3] & [maxVal(TL_in)<=3 & maxVal(A2U_rot3_run)<=3]] & maxVal(CL_out)<=3]] & [maxVal(A2L_rotated)<=3 & maxVal(press_at_upper_pos)<=2]]]
normalized: [maxVal(CU_unloaded)<=2 & [[maxVal(A2L_rotated)<=3 & maxVal(press_at_upper_pos)<=2] & [maxVal(A2U_rot3_rs)<=1 & [maxVal(CL_out)<=3 & [[maxVal(TU_rot_run)<=3 & maxVal(crane_above_feed_belt)<=3] & [maxVal(TL_in)<=3 & maxVal(A2U_rot3_run)<=3]]]]]]
abstracting: (1<=3) states: 1,657,242 (6)
abstracting: (1<=3) states: 1,657,242 (6)
abstracting: (1<=3) states: 1,657,242 (6)
abstracting: (1<=3) states: 1,657,242 (6)
abstracting: (1<=3) states: 1,657,242 (6)
abstracting: (1<=1) states: 1,657,242 (6)
abstracting: (1<=2) states: 1,657,242 (6)
abstracting: (1<=3) states: 1,657,242 (6)
abstracting: (1<=2) states: 1,657,242 (6)
-> the formula is TRUE
FORMULA ParamProductionCell-PT-5-ReachabilityBounds-9 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m0sec
checking: [maxVal(DB_trans_rs)<=3 & [maxVal(arm2_store_free)<=1 & [maxVal(arm2_backward)<=2 & maxVal(A2L_rot2_in)<=3]]]
normalized: [maxVal(DB_trans_rs)<=3 & [maxVal(arm2_store_free)<=1 & [maxVal(arm2_backward)<=2 & maxVal(A2L_rot2_in)<=3]]]
abstracting: (1<=3) states: 1,657,242 (6)
abstracting: (1<=2) states: 1,657,242 (6)
abstracting: (1<=1) states: 1,657,242 (6)
abstracting: (1<=3) states: 1,657,242 (6)
-> the formula is TRUE
FORMULA ParamProductionCell-PT-5-ReachabilityBounds-10 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m0sec
checking: [maxVal(crane_to_belt2)<=1 & maxVal(press_down)<=2]
normalized: [maxVal(crane_to_belt2)<=1 & maxVal(press_down)<=2]
abstracting: (1<=2) states: 1,657,242 (6)
abstracting: (1<=1) states: 1,657,242 (6)
-> the formula is TRUE
FORMULA ParamProductionCell-PT-5-ReachabilityBounds-11 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m0sec
checking: maxVal(CL_lower_run)<=1
normalized: maxVal(CL_lower_run)<=1
abstracting: (1<=1) states: 1,657,242 (6)
-> the formula is TRUE
FORMULA ParamProductionCell-PT-5-ReachabilityBounds-12 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m0sec
checking: maxVal(TU_lift_rs)<=3
normalized: maxVal(TU_lift_rs)<=3
abstracting: (1<=3) states: 1,657,242 (6)
-> the formula is TRUE
FORMULA ParamProductionCell-PT-5-ReachabilityBounds-13 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m0sec
checking: maxVal(table_right)<=1
normalized: maxVal(table_right)<=1
abstracting: (1<=1) states: 1,657,242 (6)
-> the formula is TRUE
FORMULA ParamProductionCell-PT-5-ReachabilityBounds-14 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m0sec
checking: [maxVal(table_at_unload_angle)<=2 & maxVal(A1L_rot2_rs)<=3]
normalized: [maxVal(table_at_unload_angle)<=2 & maxVal(A1L_rot2_rs)<=3]
abstracting: (1<=3) states: 1,657,242 (6)
abstracting: (1<=2) states: 1,657,242 (6)
-> the formula is TRUE
FORMULA ParamProductionCell-PT-5-ReachabilityBounds-15 TRUE TECHNIQUES SEQUENTIAL_PROCESSING DECISION_DIAGRAMS UNFOLDING_TO_PT
MC time: 0m0sec
Total processing time: 0m20sec
BK_STOP 1433630862612
--------------------
content from stderr:
check if there are places and transitions
ok
check if there are transitions without pre-places
ok
check if at least one transition is enabled in m0
ok
check if there are transitions that can never fire
ok
initing FirstDep: 0m0sec
2632 4767 9170 11541 37219 42566 43213 43279 57484 75476 77096
iterations count:11304 (55), effective:471 (2)
initing FirstDep: 0m0sec
Sequence of Actions to be Executed by the VM
This is useful if one wants to reexecute the tool in the VM from the submitted image disk.
set -x
# this is for BenchKit: configuration of major elements for the test
export BK_INPUT="S_ParamProductionCell-PT-5"
export BK_EXAMINATION="ReachabilityBounds"
export BK_TOOL="marcie"
export BK_RESULT_DIR="/user/u8/hulinhub/BK_RESULTS/OUTPUTS"
export BK_TIME_CONFINEMENT="3600"
export BK_MEMORY_CONFINEMENT="16384"
# this is specific to your benchmark or test
export BIN_DIR="$HOME/BenchKit/bin"
# remove the execution directoty if it exists (to avoid increse of .vmdk images)
if [ -d execution ] ; then
rm -rf execution
fi
tar xzf /home/mcc/BenchKit/INPUTS/S_ParamProductionCell-PT-5.tgz
mv S_ParamProductionCell-PT-5 execution
# this is for BenchKit: explicit launching of the test
cd execution
echo "====================================================================="
echo " Generated by BenchKit 2-2270"
echo " Executing tool marcie"
echo " Input is S_ParamProductionCell-PT-5, examination is ReachabilityBounds"
echo " Time confinement is $BK_TIME_CONFINEMENT seconds"
echo " Memory confinement is 16384 MBytes"
echo " Number of cores is 1"
echo " Run identifier is r204st-blw3-143341204500073"
echo "====================================================================="
echo
echo "--------------------"
echo "content from stdout:"
echo
echo "=== Data for post analysis generated by BenchKit (invocation template)"
echo
if [ "ReachabilityBounds" = "ReachabilityComputeBounds" ] ; then
echo "The expected result is a vector of positive values"
echo NUM_VECTOR
elif [ "ReachabilityBounds" != "StateSpace" ] ; then
echo "The expected result is a vector of booleans"
echo BOOL_VECTOR
else
echo "no data necessary for post analysis"
fi
echo
if [ -f "ReachabilityBounds.txt" ] ; then
echo "here is the order used to build the result vector(from text file)"
for x in $(grep Property ReachabilityBounds.txt | cut -d ' ' -f 2 | sort -u) ; do
echo "FORMULA_NAME $x"
done
elif [ -f "ReachabilityBounds.xml" ] ; then # for cunf (txt files deleted;-)
echo echo "here is the order used to build the result vector(from xml file)"
for x in $(grep '
echo "FORMULA_NAME $x"
done
fi
echo
echo "=== Now, execution of the tool begins"
echo
echo -n "BK_START "
date -u +%s%3N
echo
timeout -s 9 $BK_TIME_CONFINEMENT bash -c "/home/mcc/BenchKit/BenchKit_head.sh 2> STDERR ; echo ; echo -n \"BK_STOP \" ; date -u +%s%3N"
if [ $? -eq 137 ] ; then
echo
echo "BK_TIME_CONFINEMENT_REACHED"
fi
echo
echo "--------------------"
echo "content from stderr:"
echo
cat STDERR ;